
温室内轨道式喷灌装置设计
2020-06-16 10:36吴志东冯宇琛韩承津
节水灌溉 2020年6期
吴志东,潘 迪,冯宇琛,韩承津
(1.齐齐哈尔大学机电工程学院,黑龙江 齐齐哈尔 161006;2.齐齐哈尔大学理学院,黑龙江 齐齐哈尔 161006)
不同地域和季节,温室内环境会随之发生变化,作物灌溉需求量也因此受到影响,不同农作物有不同的需水特性、灌溉时间和灌溉量,这些因素直接影响土壤湿度,进而影响农作物的产量和质量[1-3]。温室节水灌溉系统研究较多,一般采用多传感器实时检测温室内土壤湿度,以ZigBee和WiFi等无线通讯方式实现CPU、多传感器检测系统和喷灌系统之间的数据传输,实现智能控制[4-6]。文献[7-10]中采用的模糊控制、综合决策等方法,可以实现更加精确地浇灌控制。文献[11]中设计的喷灌系统可以实现自动定点,但是此种定点喷灌系统需预先埋置水管、喷头以实现全区域喷灌,施工较为复杂。目前,虽然针对温室的智能灌溉系统研究较多,但多数以研究控制系统设计和控制方法为主,浇灌的形式多为地面喷灌。基于目前温室浇灌系统的研究成果,本文提出一种适用于温室环境的轨道式灌溉系统,采用模糊控制方法,以实现精细灌溉,同时该种浇灌方式不仅可以实现浇水,也可以实现喷淋药液,其功能区别于地面浇灌方式,对提高作物产量和质量具有重要意义。
1 装置结构与控制系统设计
1.1 结构设计
装置结构由移动式机械臂和运动轨道组成。为减小装置对温室内农作物遮光影响,提升灌溉辐射面积,装置采用工字型行走轨道,可视为X、Y直角坐标系。倒挂式机械臂喷灌机构可在工字型沿X、Y方向行走,轨道运动方式为直线型运动;采用往复运动滚子链传动机构,将链条展开拉直固定在支撑梁上,链轮装配在移动的横梁上,链轮与链条相互啮合,在电动机驱动下进行往复直线运动,可精确控制运动位置。装置结构如图1所示,整体结构质量较轻,不需要大型轨道结构,以免遮光。整个机械结构由四根立柱架起,驱动电机带动链轮在链上运动,从而使横向导轨在滑轨上行走,驱动电机带动链轮在链上运动,从而使机械臂在滑轨上行走,完成倒挂式机械臂喷灌机构在直角坐标下任意位置定位,定位后即可根据土壤湿度实际情况进行灌溉动作。

图1 装置结构图
倒挂式机械臂喷灌机构具有3自由度,分别为:绕末端Z轴转动、沿Y轴平动以及沿X轴平动,3个自由度采用3个步进电机经减速器传动,各个自由度保持运动的相互独立性,互不干涉,用以完成浇灌时伸缩和旋转的操作功能。该机构主要包括大臂、小臂、旋转底座3个部分,底座的旋转中心与喷头的旋转中心在同一直线上,所以大臂和小臂长度必须相等用以实现更精准的浇灌,结构简图和三维结构分别如图2(a)和2(b)所示,参数如表1所示。机座可进行 360°转动,实现机械手各个方向的喷灌动作;大臂可完成0°~180°俯仰运动;小臂可完成0°~180°俯仰运动,小臂端部为喷头固定端,可以实现固定不同种类喷头。
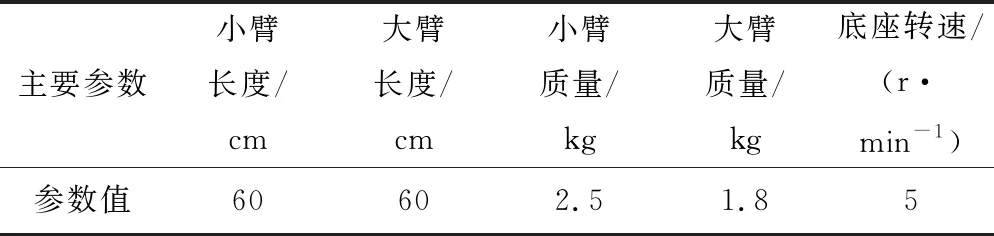
表1 主要参数
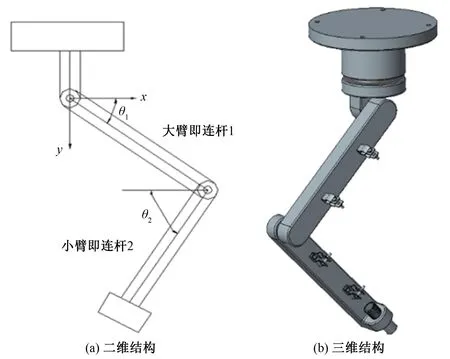
图2 倒挂式机械臂喷灌结构
1.2 控制系统设计
控制系统采用模块化设计,如图3所示,主要由传感器检测模块、无线通讯模块、控制处理模块以及驱动模块组成。土壤湿度采用YL-69型传感器实时采集土壤湿度, 根据“势函数”方法对传感器节点进行布置;运动轨迹检测模块由多个红外测距接近传感器组成,实现对移动式机械臂的运动轨迹判定;控制处理模块以STM32芯片为核心,实时处理数据、控制机械臂移动以及控制浇水量,协调各模块之间工作;驱动模块主要包括继电器驱动电磁阀模块和L298N电机驱动模块;通过计算,底座电机转矩约为 ,故选用86BYG250CN型号步进电机。
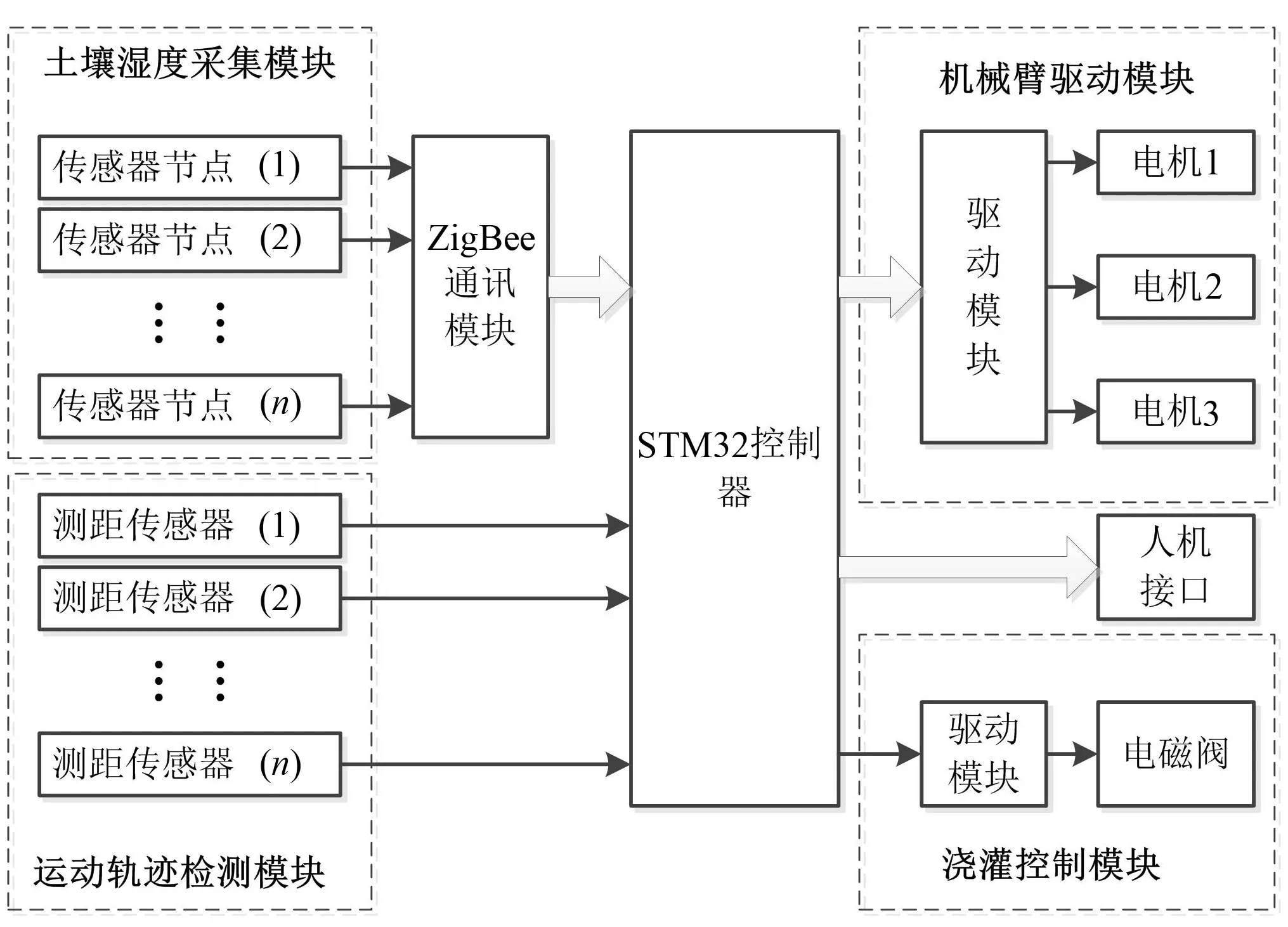
图3 控制系统原理框图
本文所设计装置核心部分为前端土壤湿度采集和后端浇灌装置运动精确控制,从而实现精细喷灌目的。
2 土壤湿度采集方法
现阶段土壤湿度传感器节点多依靠人工经验布置,数据采集误差较大[12],因此不能够满足本文高精度灌溉决策要求。为克服以上问题,本文提出一种传感器在空间区域有效布点的方法,基于势函数和电势场理论,可将传感器节点视为“带电荷粒子”。借鉴电荷势函数的相关理论,即“假设在一个正方形平面区域内,存在若干个带等量电荷粒子,并相互排斥,所以在该平面区域内粒子会达到一定平衡状态”,当势函数值取得极小值时则各粒子达到平衡状态[13]。在运动学中势函数常用于防碰撞控制中,速度和距离均是重点考虑对象[14,15]。用于土壤湿度采集的传感器节点为非运动状态,故计算过程中仅考虑距离即可。根据该理论,节水灌溉实施过程中可以将温室视作n个正方形模块组合而成,各模块内检测土壤湿度的所有传感器节点xi构成一个集合S,而传感器节点视作“带电荷粒子”,其电量为qi(可用传感器感知范围表示“粒子带电量”),用传感器节点xi势函数值大小度量节点布置是否到达均匀性。传感器节点xi到 (1≤i≤n,j≠i,1≤i≤m)的距离为|xj-xi|,则点xi与xj相互作用势函数u为:
(1)
点xi与集合S中其他节点相互作用势函数ui,s为[16]:
(2)
若采用的传感器为同一类型,则可认为qi=qj,则:
(3)
势函数取得极小值条件为[17,18]:
(4)
根据人工经验进行传感器布点分布比较随机,如图4(a)所示,布置传感器节点较多,数据采集范围有交叠。势函数值度量了传感器节点是否均匀的程度,根据文献[19]中所述,可认为任一节点受集合内所有点作用力的矢量和为零时,势函数为最小值,布点达到均匀。
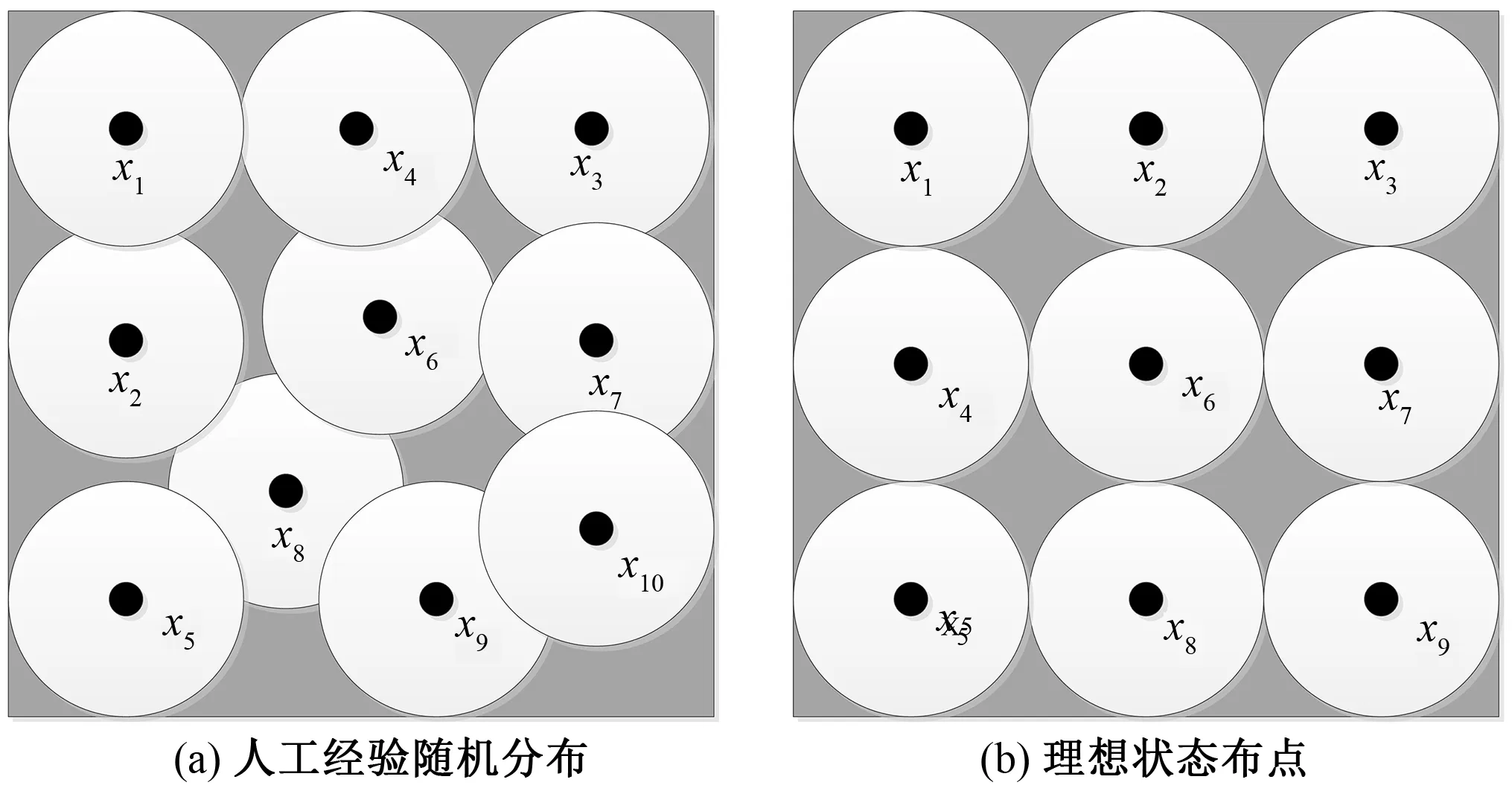
图4 均匀布点前后对比
根据势函数值大小需要调整每个传感器节点在平面中的位置,沿着使势函数值减小的方向移动某传感器节点,使该节点在平面内势函数值最小,重复此过程,最终可使平面内每个节点的势函数值处于最小。但当势函数最小时,传感器对数据采集不能达到最大面积的覆盖,综合考虑,取各节点势函数相等时,可实现均衡状态即传感器节点的布置达到最优状态,如图4(b)所示, 其中,xi(i=1,2,…,n)分别表示传感器节点,白色区域表示传感器可采集数据范围 ,此均匀性布点并不是土壤面积的全区域覆盖,而是土壤湿度数据的全区域覆盖。
通过以上分析可知,传感器数据采集范围是影响均匀布点的主要因素。本文研究以YL-69型土壤湿度采集传感器为例,通过实验可知当传感器埋置在45 cm深处,对中心点单点浇灌,当中心点湿度达到100%时(土壤水分饱和)即已达到传感器采集数据的上限值,其对土壤湿度的采集范围为60 cm。
对传感器采集范围进行数学建模,以传感器节点i为中心,在平面S上任何一点采集的土壤湿度值可表示为:
(5)
式中:r为距中心节点距离;Q为中心处浇水量;当传感器类型固定,埋设深度固定,k值为常数。
而点电荷i所在在平面S上任何一点的电势可表示为:
(6)
传感器检测所在平面上任一点土壤湿度与点电荷所在平面任一点电势基本性质相似,根据对偶性,可用公式(6)代替公式(5)。若将n个传感器所在的平面视为一个集合S,那么,平面内任一节点xi与集中其他节点的相互作用势函数可用公式(3)表示,从而得出最优传感器布点结果。均匀性布点可以更加精确采集土壤湿度,也可以得到区域内任一点土壤湿度值,为精确控制浇灌时间提供数据支持。
3 土壤湿度模糊控制
为精确控制浇灌时间,进而控制浇灌量,土壤湿度采用模糊方法控制。选择土壤湿度偏差E以及偏差变化率ΔE为系统输入量,电磁阀开启时间U为输出量。设置土壤湿度传感器采样周期为2 s,一个周期内土壤湿度在10%以内变化,模拟实验过程中,由装置单点浇灌,土壤最低湿度值达到50%所需时间为40 s,土壤湿度偏差E基本论域范围为[-8%,8%],△E基本论域范围[-12%,12%],输出控制量U基本论域为[0,40 s]。土壤湿度偏差E和偏差变化率△E模糊语言描述为:NB(负大)、NS(负小)、O(0)、PB(正小)、PS(正大)。O表示当前土壤湿度处于土壤湿度50%范围内;NB、NS分别表示土壤湿度值小于50%的程度逐渐减弱(NB:缺水较为严重);PB、PS分别表示土壤湿度值高于50%的程度逐渐增强(PS:水分含量过大)。控制电磁阀开启时间变量U用五个模糊语言描述为:O(关闭电磁阀)、PS(短时间打开电磁阀)、PM(中等时间开启电磁阀)、PB(长时间开启电磁阀)、PB+(很长时间开启电磁阀)。从O到PS+表示滴灌电磁阀开启时间逐渐加长,表2为模糊论域与基本论域关系。
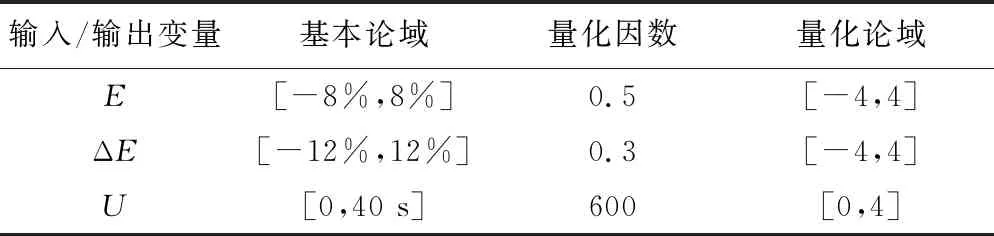
表2 输入输出关系
土壤湿度控制中输入输出变量都具有线性关系,输入输出变量均采用三角形隶属函数,使其均匀分布在模糊集合中。土壤湿度模糊控制器的偏差E、偏差变化率ΔE与控制电磁开启时间U的隶属函数分别定义如图5-7所示。
将模糊控制理论与人工专家经验相结合,在土壤含水量偏差大时,输出量要尽可能大,尽快消除偏差;土壤湿度偏差较小时,输出量要以系统的稳定为主,防止输出量大引起超调现象。在温室大棚中,土壤湿度高于所设置土壤湿度最大值时无法使电磁阀动作,其模糊控制响应表如表3所示。
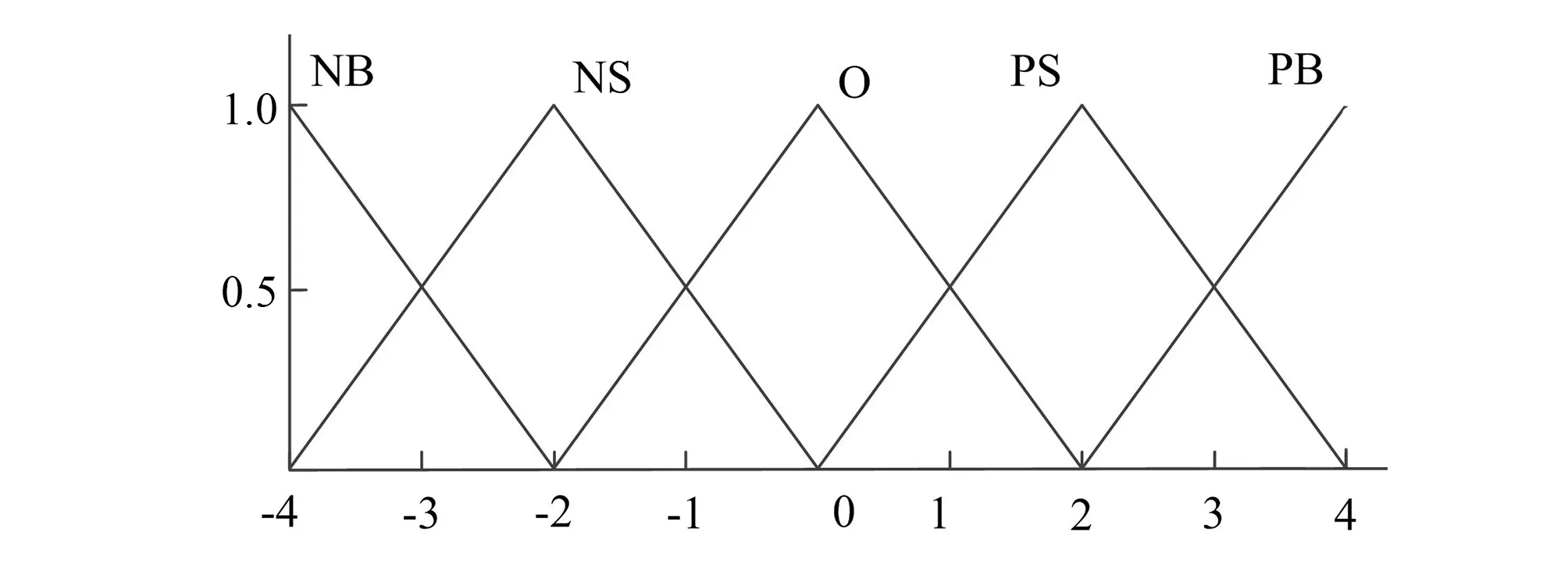
图5 E隶属函数
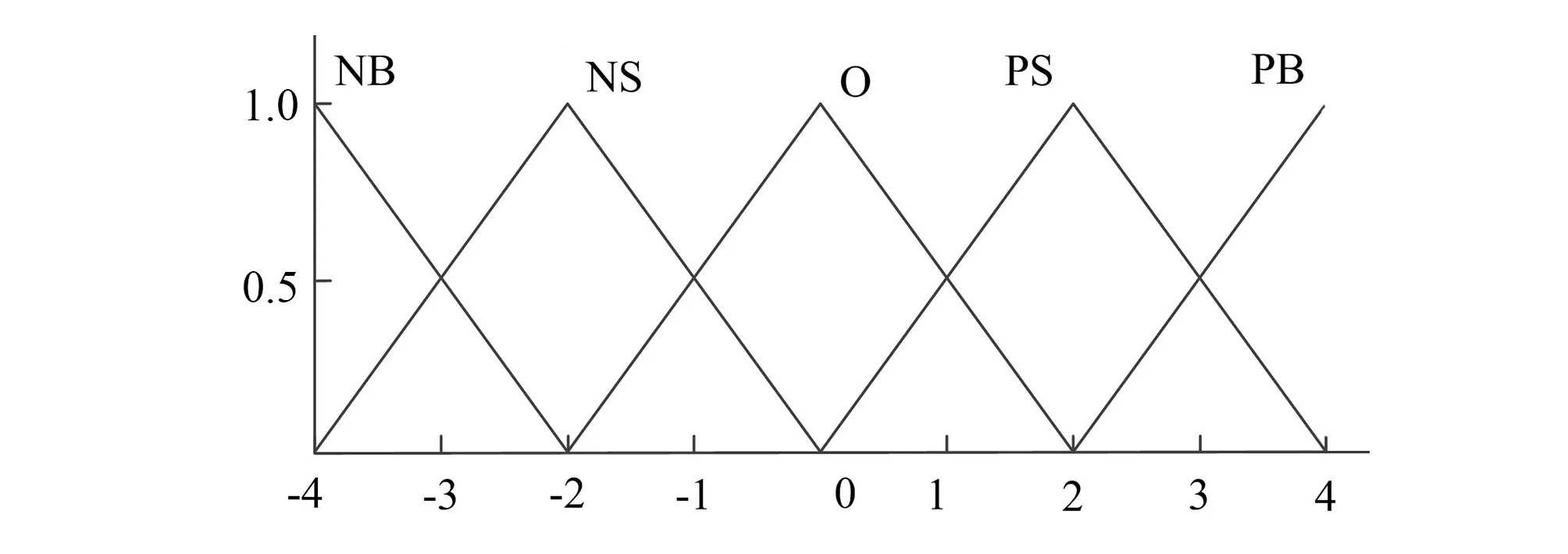
图6 ΔE隶属函数
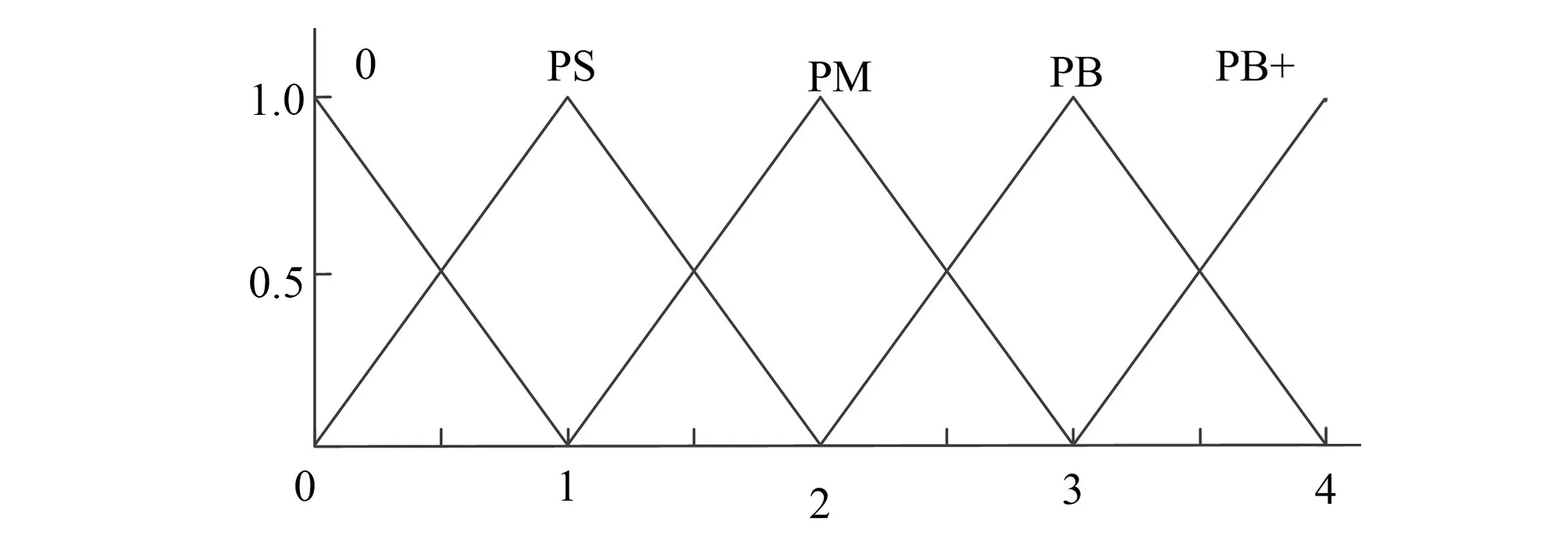
图7 U隶属函数
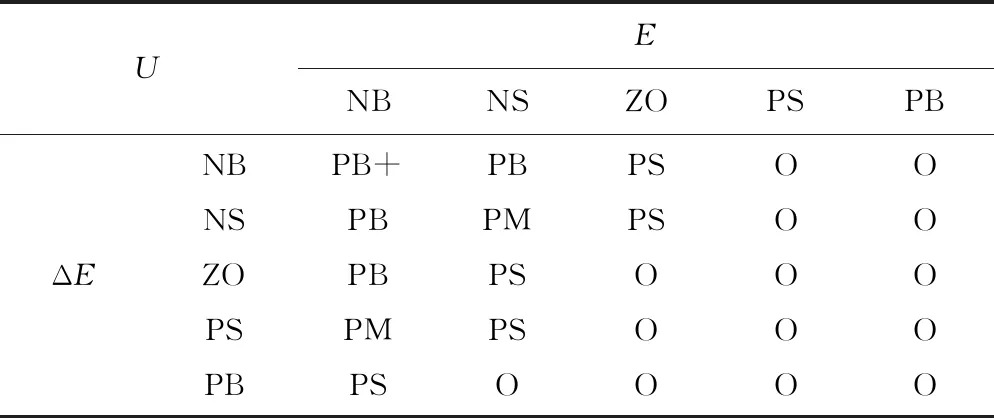
表3 土壤湿度模糊控制
建立模糊规则,在SIMULINK 环境下建立模糊控制仿真结构图,并对其系统进行仿真实验。仿真结构如图8所示,仿真曲线如图9所示。通过仿真曲线可以看出,响应速度快,小于1 s,超调量小,控制精度高和定性强。
4 机械臂运动路径及PI控制
4.1 运动路径
倒挂式机械臂喷灌机构在电机驱动下在工字型轨道上沿直角坐标方向运动,运动路径如图10所示。控制方式为开关控制,其主要控制分两部分:一是行走,机械臂沿X方向行走,在X方向轨道的等距离处安装红外测距接近传感器即定位传感器,当机械臂沿X方向行走到达定位传感器处,输出量由常闭变成常开,此时机械臂在X方向停止运动,重复以上动作,直至运动到X方向末端;横向轨道带动机械臂沿Y方向运动,直至Y方向定位传感器处停止,继续沿X方向运动;机构按照以上路径规则行走,直至终点。二是定位,机械臂在运动过程中主要在X方向进行定位,根据检测土壤湿度的传感器相应的位置,在X方向轨道上安装一个与之对应的红外测距接近传感器,当传感器检测到预定湿度时将信号输出给与之对应的开关量使机械臂在X方向停止运动,完成定位,进行喷灌。
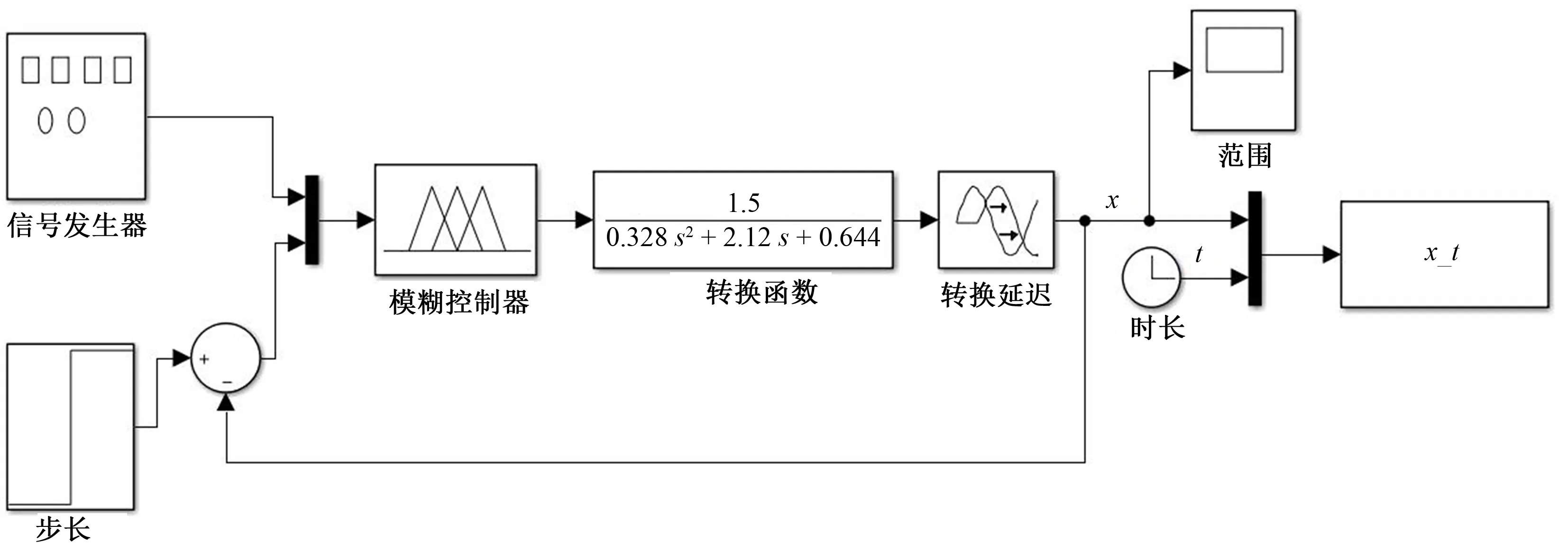
图8 模糊控制仿真结构图
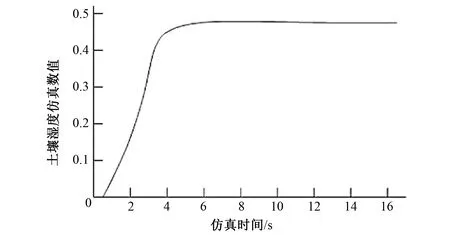
图9 模糊控制仿真曲线
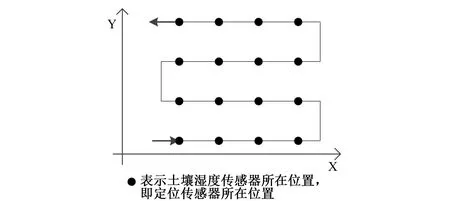
图10 机械臂行走路径
4.2 PI控制
为配合土壤湿度模糊控制,实现整体装置的快速动作,采用比例积分方法控制即PI控制,实现倒挂式机械臂机构快速响应控制指令功能,驱动机械臂运动,完成相应行走路径。PI控制基本原理如图11所示,并利用MATLAB/Simulink对本文所采用的PI控制器进行仿真,结果如图12所示,电机控制响应至稳定时间可控制在1 s以内,表明PI控制可以保证驱动电机控制响应速度快、运行稳定。
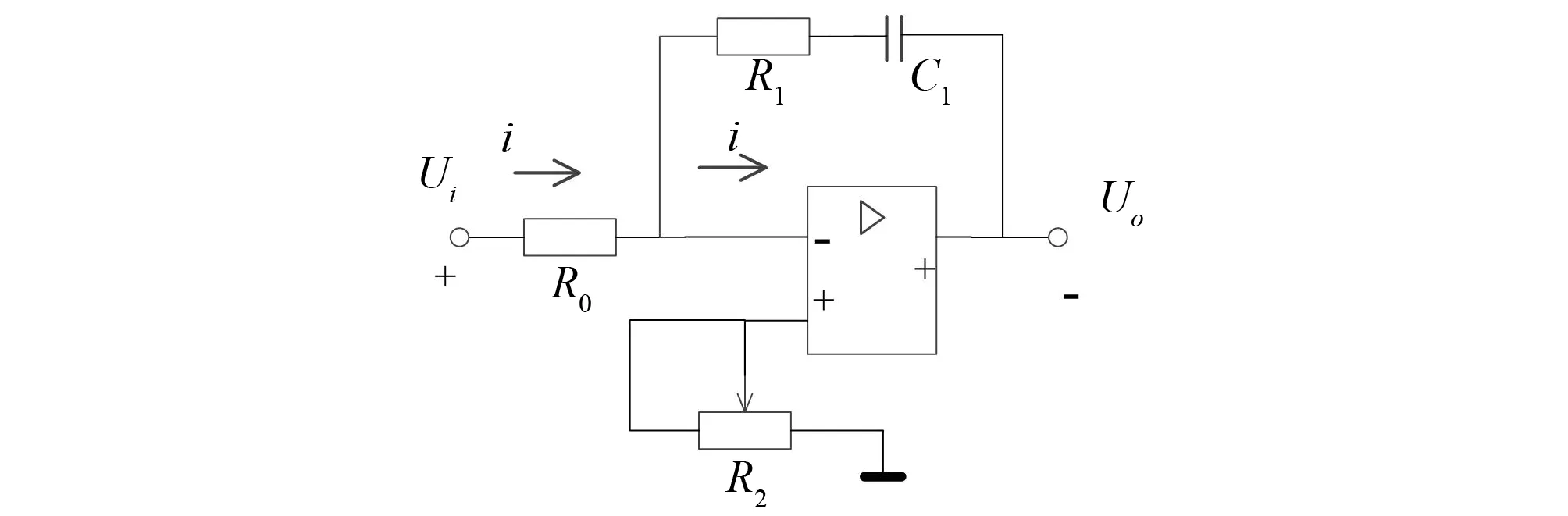
图11 比例积分调节器原理图
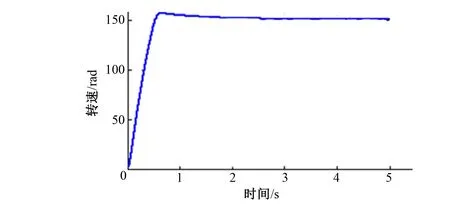
图12 PI控制仿真结果
4.3 模型测试
图13为装置整体结构模型,利用土壤湿度检测仪器测得个采集节点湿度并校对土壤湿度传感器,通过上位机预设各节点土壤所需湿度。装置下方为实验土壤区域,区域内埋置4个传感器节点,对应节点上方设有接近开关。通电调试后,机械臂可按预设指令进行上下伸展、旋转,无线接收模块接收数据至机械臂动作时间不到1 s;倒挂式机械臂可沿横向、纵向轨道运动,运动轨迹与预设运动轨迹一致。
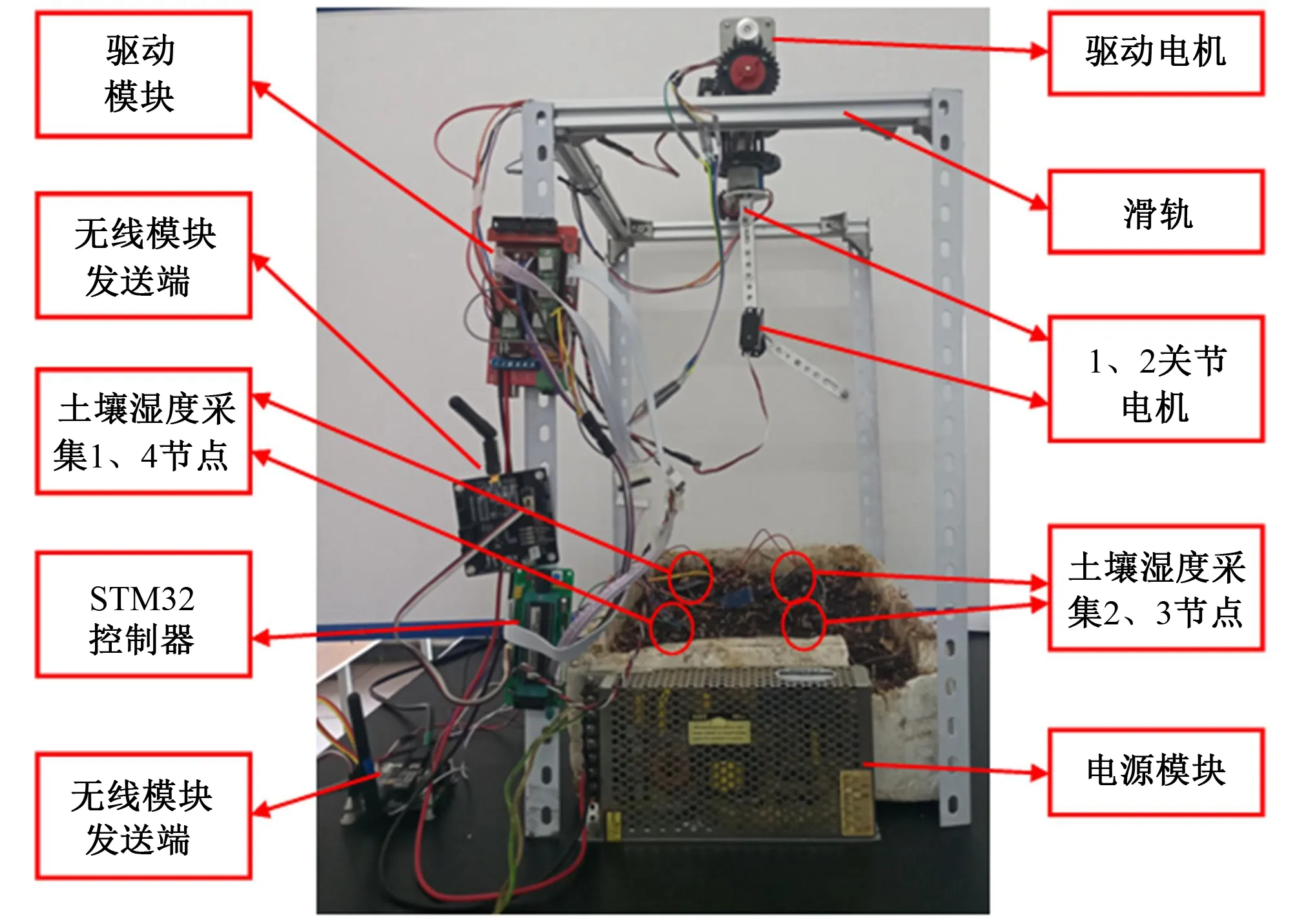
图13 装置模型
装置工作过程中,水管半径尺寸R固定不变,假设水流速度v也不变,则任一节点喷灌水量Q由喷灌时间决定,机械臂末端在各节点处停留时间T即喷灌时间,Q与T关系由公式(7)表示。
Q=πR2vT
(7)
以每喷灌30 s土壤湿度变化5%作为量化标准,实时测得土壤湿度数据记作C,任一节点所需湿度记作A(可设置),则T可用公式(8)表示,所得结果如表4所示,各数据取整数。可知装置可自动完成相应动作,喷灌时间满足作物预设所需。
(8)
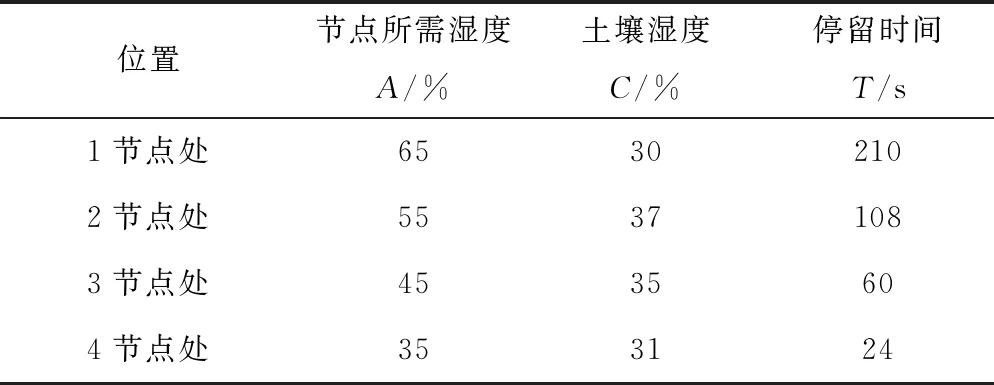
表4 测试数据
5 结 语
本文设计一种可沿轨道移动的大棚灌溉装置,设计倒挂式机械臂喷灌结构,可实现浇灌、喷药两种功能。提出以“势函数”理论为基础的传感器布点方式代替人工经验布置,可保证传感器布点均匀,采集数据准确。土壤湿度采用模糊控制方法进行调节,超调量小,响应速度小于1 s;同时,为了实现装置得快速动作响应,采用PI控制方法可对装置进行运动控制,响应时间小于1 s。装置模型搭建完成,以5%的湿度作为量化数值,数据测试及分析,可知装置按轨迹进行运动并完成喷灌动作。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
农业灾害研究(2022年1期)2022-05-07
成都信息工程大学学报(2021年6期)2021-02-12
天津农林科技(2020年3期)2020-08-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年16期)2019-09-27
电子制作(2019年15期)2019-08-27
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
