
某型发动机高空小表速转速摆动问题分析
2020-06-13 06:18:50李杨
航空发动机 2020年1期
李 杨
(海军驻沈阳地区第二军事代表室,沈阳110043)
0 引言
某型发动机在进行高空小表速试飞时,在高度11 km以上,表速小于500 km/h时出现转速摆动的问题,此时发动机控制计划为按照低压转子转速通道限制值控制发动机最大工作状态,n1摆动量超出了允许的摆动范围,影响飞行安全[1];按照高压转子转速n2和排气温度T6限制通道控制发动机时,发动机工作稳定,无参数摆动情况。国内同系列原型发动机在相同的工作状态点则无转速摆动问题。
本文通过对发动机低压转子转速控制通道进行对比分析[2-4],基于当前控制系统架构和发动机起动加速性的特殊要求,提出低压转子转速控制通道分段控制措施[5]。
1 低压转子转速控制原理
当采用综合电子调节器进行低压转子转速n1闭环控制时,控制回路由综合电子调节器、S1占空比电磁阀、执行活门、选择活门、校正活塞、随动活塞、计量活门、供油管路、发动机、转速传感器以及电缆组成。此时,被控量为n1转速,控制量为主燃油流量。
其中综合电子调节器负责根据发动机进口总温T1信号设定n1转速的限制值,根据n1传感器的采集,生成n1限制值和反馈值的偏差信号,从而生成对应的电压信号ΔU,并利用喘振压差信号ΔPck对电压信号进行微分补偿,得到失调电压ΔUppt,根据失调电压计算S1占空比,输出到主燃油泵调节器的S1占空比电磁阀,从而控制发动机供油量,实现按n1转速控制发动机最大工作状态的功能[8],如图1所示。
2 原因分析
在某型发动机研制初期地面起飞加速性攻关时发现,综合电子调节器在发动机转速85%时开始限制供油,从而降低了发动机加速性能。为适应发动机地面起飞加速性要求,综合电子调节器低压转子转速n1通道的超前环节比例系数k2变小(见表1),从而减少加速过程中S1对加速油量的限制,提高发动机加速性。改进后,经地面试验和专项试车验证,在发动机加速过程中92%转速时开始限制供油,从而提高发动机加速性,满足某型发动机地面加速性要求。
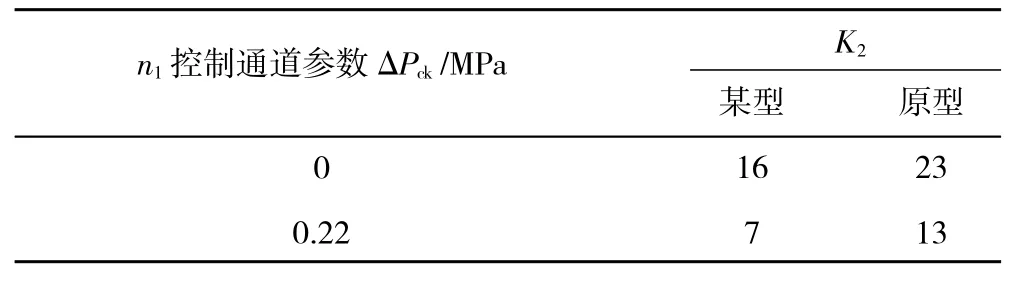
表1 n1超前环节比例系数K2对比
但在高空小表速工作条件下,由于发动机工作负载减小,系统闭环控制的稳定裕度减小,导致在发动机高空小表速条件下工作时,易出现n1转速摆动问题[9-10]。
3 建立数学模型
发动机转速闭环控制系统有3个环节:控制器(综合电子调节器)、执行机构(主燃油泵调节器)、被控对象(发动机),如图2所示。
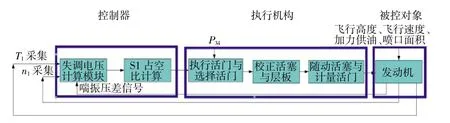
图2 n1控制回路仿真原理
根据n1控制回路各环节的功能,将其划分为6个模块,基于AMESIM仿真软件分别进行建模和仿真验证[11-15],并集成整个n1控制回路模型,如图3所示。
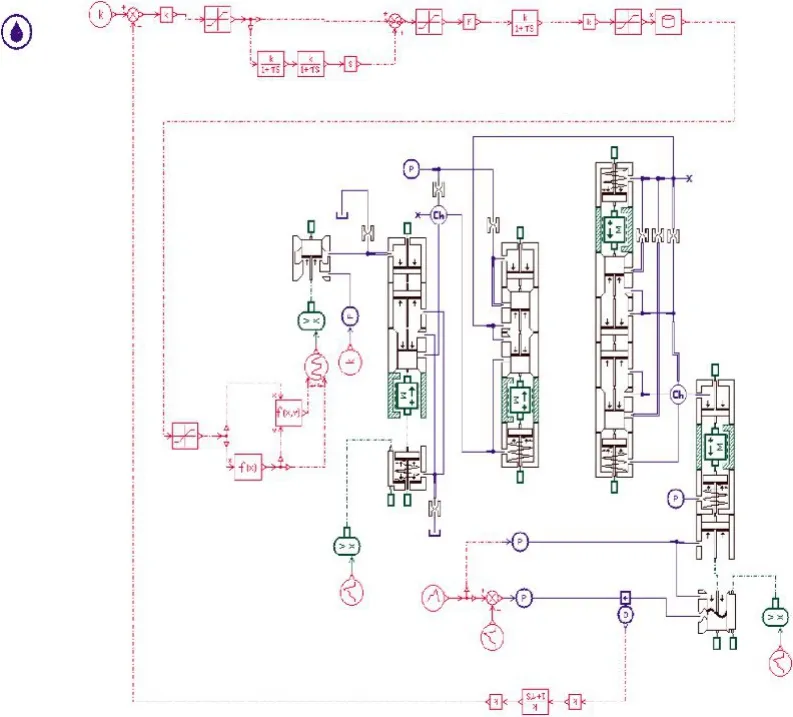
图3 n1控制回路仿真模型
4 基于AMESIM的仿真分析
低压转子转速n1程序电路中超前环节传递函数表达式为

式中:K为增益系数;T为时间常数;S为复数的自变量。
发动机的综合电子调节器中K、T的计算公式为
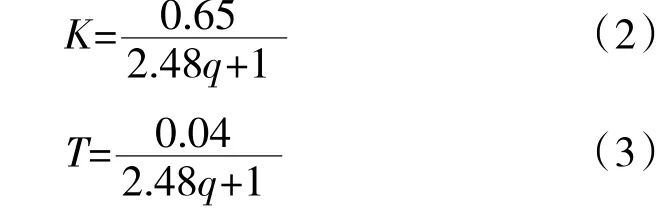
式中:q为占空比信号,由喘振压差信号ΔPck插值得到。
原型发动机的综合电子调节器中K、T为
全包线范围内的喘振压差信号的变化规律如图4所示。
在高度为11 km、表速为300 km/h的飞行状态点,喘振压差信号ΔPck根据图4插值,再分别将某型和原型综合电子调节器中K、T系数代入仿真模型,运算转速结果如图5、6所示。从仿真分析过程及结果来看,修改n1超前环节,使超前环节比例系数为原型的状态,可以解决某发动机高空小表速转速摆动问题[16]。

图4 中间状态喘振压差信号全包线变化规律
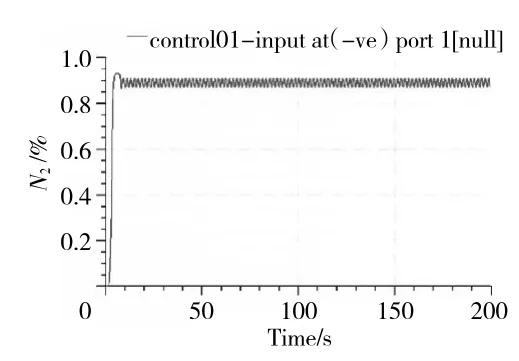
图5 某型发动机n1转速控制输出仿真结果
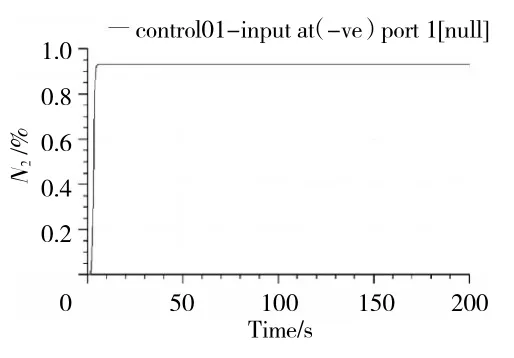
图6 原型发动机n1转速控制输出仿真结果
5 半物理试验
在半物理试验器上,对发动机进行n1控制回路的大闭环仿真试验[17]。引出综合电子调节器的k2的调整点,连接外部电阻箱,调整k2利用真实的发动机数学模型和完全真实的控制系统,进行高空左边界验证。
半物理模拟试验成功复现发动机在高度为11 km,表速为300 km/h飞行状态点处参数摆动现象,而引入原型状态的超前环节比例系数后,摆动消除。试验结果如图7、8所示。
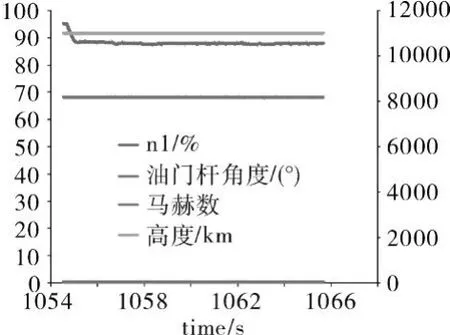
图7 原型发动机半物理试验n1摆动情况(摆幅为±0.2%)
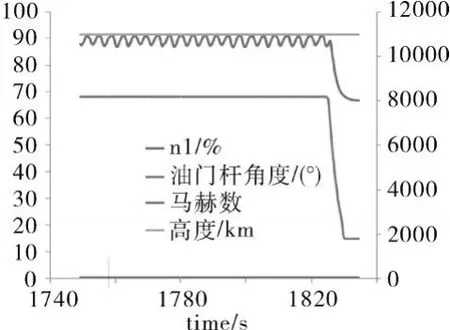
图8 某型发动机半物理试验n1摆动情况(摆幅为±2.2%)
6 改进措施及验证
在保证发动机高空小表速飞行状态稳定的同时兼顾发动机地面加速性,使用当前系统防喘联锁的高度信号,对n1超前环节进行分段控制,低空及地面保留当前超前环节比例系数,不影响发动机地面起动加速性;高空使用原型发动机超前环节比例系数,可提高发动机高空工作稳定性。
针对上述改进措施开展并通过如下验证:
(1)地面加速性验证。进行大油门特性、小油门特性、全程加速和半程加速等相关加速功能检查,加速性能满足发动机地面使用要求;
(2)高空台模拟验证。在转速摆动工作点验证改进措施有效性和控制率转换的稳定性,试验项目包括在高度为11 km、表速为300 km/h飞行状态点加力通断和稳定工作试验、n1控制通道的放大系数转换专项试验,发动机均能稳定可靠地工作,无转速摆动现象;
(3)试飞验证。落实改进措施的发动机在高度为11 km、表速为300 km/h飞行状态点,在训练状态和作战状态模式下,处于中间状态和加力状态时均工作正常,未出现参数摆动现象。
7 结束语
通过对比分析,以及数值仿真、半物理试验、高空台模拟、试飞验证,采取“按高度分段控制n1超前环节比例系数”的改进措施,既保证了发动机高空小表速飞行状态稳定性,同时兼顾了发动机地面加速性和发动机研制进度。首次采用的分段控制策略可在同类发动机或同类问题中进行借鉴和应用。
猜你喜欢
环球时报(2022-02-28)2022-02-28 16:16:01
小学生学习指导(高年级)(2021年3期)2021-04-06 08:49:40
今日农业(2019年16期)2019-09-10 08:01:32
小天使·一年级语数英综合(2019年2期)2019-01-10 11:57:30
小天使·一年级语数英综合(2018年11期)2018-11-23 09:47:26
小学阅读指南·低年级版(2018年5期)2018-11-02 10:19:50
学习月刊(2015年10期)2015-07-09 03:35:18
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
