无人机三维空域监视系统设计
2020-06-13 07:11曹景真汪涛周鼎森
电子技术与软件工程 2020年2期
文/曹景真 汪涛 周鼎森
(中国民航大学 天津市 300300)
1 概述
在当前市场上,无人机体积小,飞行高度低,速度慢,在飞行过程中自由度大,其飞行状态人为因素掺杂度高,无人机状态信息不能有效获取。本文基于4G通信技术,将无人机上搭载的传感器数据实时传输到服务器端,服务器端具备数据存储和回放功能,对空域内装载此系统的无人机形成全方位、多角度监视。
2 系统组成
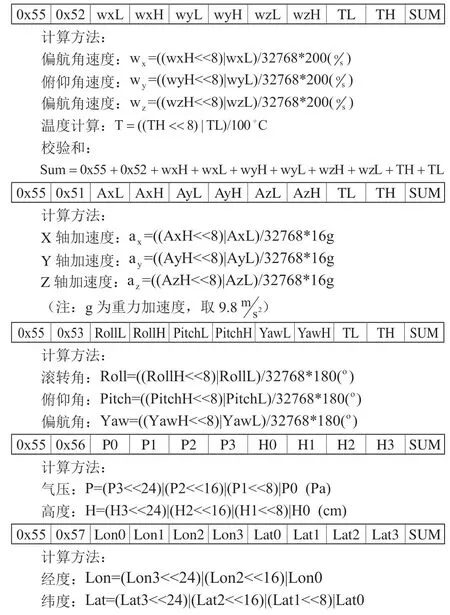
无人机三维空域监视系统主要由飞行数据采集及4G网络传输模块、网络服务器、飞行数据库、上位机等四部分组成。图1是系统总体设计结构框图。飞行数据采集及4G网络传输模块集成了姿态传感器、气压传感器、GPS接收机等传感器,是本系统的核心部分。将其装载到无人机上,可实时采集飞行过程中无人机航向、姿态、高度、经纬度数据,并通过4G网络将以上信息传输到网络服务器端。网络服务器接收到实时数据后,将数据存储到数据库中,便于实现前端上位机的数据解析显示以及进行数据记录回放功能。
在数据采集及传输过程中需要用到多种通信协议与传输方式,通过服务器实现数据暂存与超视距传输。其中传感器与核心控制单元的数据传输方式为串口通信。MCU收到各传感器采集数据后,需要对其进行解析、滤波等处理,同时判断数据的有效性,只有有效数据才会上传服务器,减小干扰造成的数据精度误差。机载终端与网络服务器采用TCP协议传输数据,通过给机载端设备进行编码,通过特定格式的传输协议将数据上传服务器端。
网络服务器将接收到的数据包根据不同的无人机识别码、飞行参数类型等分辨标准进行解码、分类,对数据进行暂存,上位机提取数据库中分类信息进行可视化处理,供用户查看所有配置机载设备的无人机在一定时段内的实时状态信息,有效实现无人机群的监视。
3 系统硬件设计
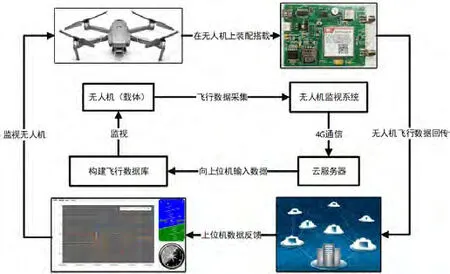
图1:无人机三维空域监视系统构成框图

图2:系统硬件装配图
如图2所示,系统中硬件部分采用的核心微控制器是意法半导体公司(ST公司)生产的STM32F405RGT6芯片,其以带有FPU的ARM32位Cortex-M4为内核,最高工作频率168MHz,拥有1兆字节的闪存和192+4Kbytes的SRAM,包括64-CCM(核心耦合闪存)数据的千字节内存;外围延拓15个通信接口,其中3个I2C接口,4个USART/2个UART接口(传输速率10.5Mbits/s,支持ISO7816通信协议、LIN,IrDA接口和调制解调器控制),3个SPI接口(传输速率42Mbits/秒),2个CAN总线接口(2.0B有源),以及USB2.0全速设备/主机/OTG控制器接口;拥有17个定时器,最多12个16位定时器和2个32位定时器,每个定时器有多达4个用于输入捕获/输出比较/PWM或脉冲计数的通道;64个I/O端口。与其他单片机相比拥有性能高、成本低、功耗低等特点,可满足系统要求。
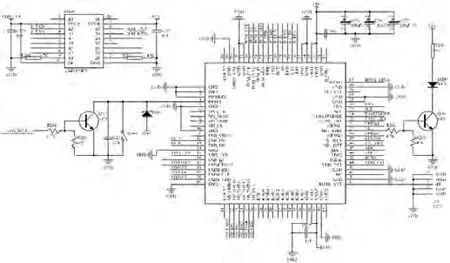
图3:SIM7600CE通信子系统电路原理图
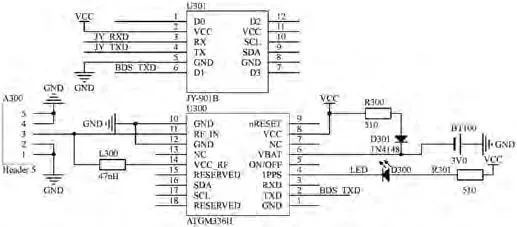
图4:定位子系统与姿态感测子系统设计

图5:地面测试情况显示
同时本系统还围绕核心处理器搭建多个外围硬件电路,用以保障数据采集与核心部分的正常工作;
实验室安全是高等院校校教学和科研工作顺利完成的先决条件,也是国家财产和实验室活动人员安全的重要保证[1]。而医学院校因为其专业特点,实验室的安全管理显得更为重要,由于其管理不善所引发的都是损失惨重的大事件[2-4]。比如,在2009年,浙江某所医学高校误将实验室的一氧化碳气体接到了学习室,从而导致一位在读博士的无辜中毒死亡等事故。类似的众多事件告诉我们: 现在的医学院校实验室安全管理体系比较落后,操作过程中存在较大的漏洞,必须通过完善其安全管理评价体系,在宏观上减少管理上的疏漏,才能最大程度地避免和减少相关安全事故的发生。
(1)复位电路:选用的单片机复位模式为低电平复位,当单片机第7个引脚会收到一个短暂的低电平信号进行,核心控制部分自复位;
(2)供电电路:初始输入电压为直流5V,经过MIC29302WU进行降压处理,将电压降至3.8V给SIM7600CE供电;同时在主控板上围绕AMS1117电源芯片、两个22uF电容等器件搭建5V-3.3V降压电路,给STM32F405RGT6单片机提供3.3V供电电压,保证其正常工作;
(3)下载电路;本主控板集成两种下载方式;A:借助CH340芯片将USB信号转化为TTL电平,写入单片机。B:SWD模式下载,借助J-LINK下载器将SWCLK连接到PA14,将SWDIO连接到PA13,下载器提供3.3V参考电平,进行程序烧写。

图6:实际测试情况对比
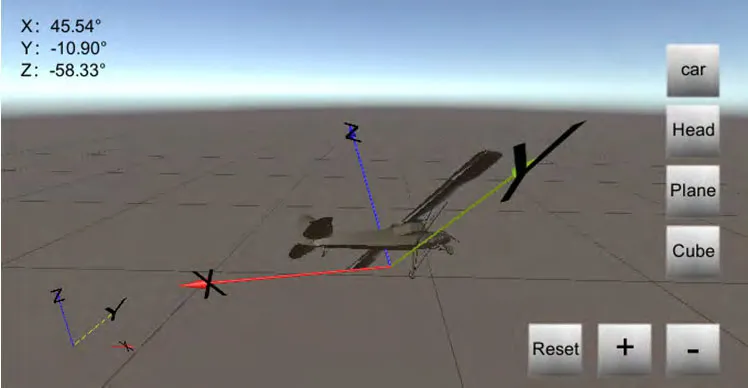
图7:飞行器实时姿态与偏转角度

图8:飞行器三轴加速度变化情况
由于无人机飞行过程中涉及飞行参数种类多、数据量大,并且在空域中需要监视3架以上的无人机,所以在传输过程中一定要保证数据的有效传输,避免出现数据串扰。并且考虑其监视功能,数据传输的速度也应相应较快。
为此在芯片选型上选择SIM7600CE模块,其具有标准的AT命令接口,可以提供GSM语音、短消息等业务,在GPRS模式下的数据上行/下行最大速率为85.6Kbps。并且SIM7600CE模块的输出信号需要经过一8位双向电压电平转换器(TXB0108PW)进行转换,转换为STM32单片机串口(USART1)可以捕获到的信号。如图3所示。
在监视系统中,采用BDS/GNSS全星座定位导航模块ATGM336H。其为中科微第四代低能耗GNSS SOC单芯片,支持的卫星导航系统有:中国的北斗定位系统、美国的GPS、俄罗斯的GLONASS、欧盟的GALILEO以及卫星增强系统等。它还可以同时接受6个卫星导航系统的GNSS信号,可以实现联合定位、导航和授时。在数据输出方面,数据报文通过USART作为主要输出通道,输出模式按照NMEA0183协议格式输出。
为获取稳定且精度高的姿态数据与高度数据,此子系统采用JY-901B模块,其内置三轴加速度计、三轴角速度计、三轴角度计、三轴磁力计以及气压计。并且在传感器上还集成了32位高性能的Cortex-M0内核处理器,可以进行状态估计,同时进行动力学解算,使用卡尔曼滤波得出高精度、高性能的飞行数据。在数据传输方面可以选择两种传输方式:I2C和USART,其中I2C支持多机连接。在本设计中,我们使用了USART传输模式,与单片机的USART2进行数据交换。如图4所示。
4 系统软件设计
4.1 传感器数据解析方法
5 测试结果与分析
5.1 地面静态测试
将该系统放置于地面静止,同时与上位机建立通信,将收到的数据按照对应数据类型进行分类呈现。通过图5,上位机数据界面包含的数据类型有:时间信息、三轴加速度信息、磁场方向、周围环境气压值及温度值、GPS信息等。
5.2 飞行过程测试
在定位子系统测试时,将接收到的GPS信息通过串口发送给STM32单片机,经过串口助手对传输数据进行读取,如图6所示串口接收到的经纬度信息输入到地图中可以看到:定位地址与实际测试地点位置相符,差值在允许范围内。
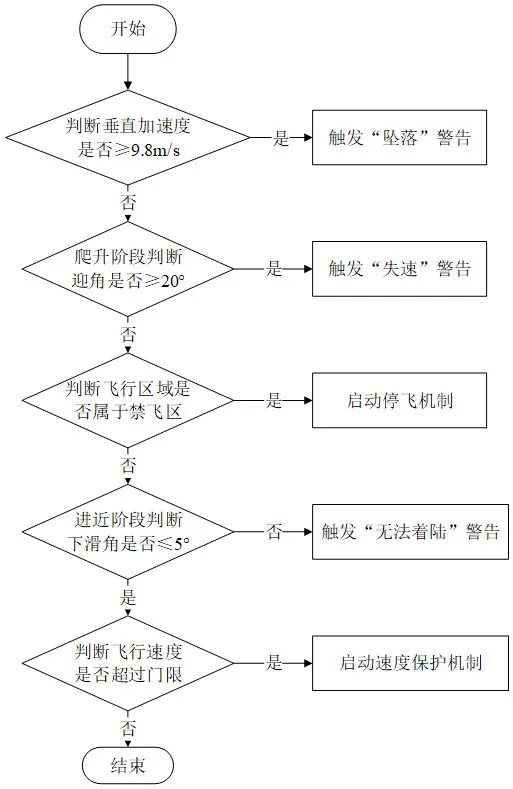
图9:按飞行阶段划分的应急机制流
如图7所示,当前飞行器的滚转角(参数X)为45.54°,俯仰角(参数Y)为-10.90°,偏航角(参数Z)为-58.33°。
图8左为测试时间内飞行器三轴加速度以及其在时间段内的变换情况,右半部分为监视无人机飞行状态显示,当前状态为向左转弯。飞行航向指示见右下方。
6 系统预警机制设计
通过参照民航客机飞行特点以及相关飞行参数,我们设计出如图9所示的应急机制流程,此流程将分为以下4个部分:
6.1 爬升阶段
当民航客机爬升迎角超过一定值时,升力将会急速下降,导致飞机出现失速危险。所以在此系统中使用姿态传感器解算出监视无人机的迎角数据,当爬升迎角超过门限值时,此时上位机端会提示对应架次无人机出现失速风险。
当失速警告状态被触发时,可以通过人工操纵或者无人机反馈控制使其产生一个低头动作,保持一定的升力继续进行爬升。
6.2 巡航阶段
当监视无人机爬升到一定高度时,本系统将主要对无人机飞行时的速度参数、角运动参数进行监视。
在速度监视模式下,本系统在水平飞行速度、垂直升降速度参数上设置阈值;在角运动参数监视模式下,本系统在侧滑角、滚转角速度、偏航角速度参数上设定阈值;在高度监视模式下,本系统根据飞行环境中的地形参数设定高度限制范围。
在此飞行阶段,超出/不满足对应模式下的阈值范围都将会触发应急机制,上位机也会弹出警告,提醒监视员/操纵者采取措施。
6.3 进近阶段
考虑到飞行环境的复杂性以及对受监视无人机的保护作用,本系统设定下滑角限制包线,当超出此限制包线时,将不利于受监视无人机的着陆。
同时,在下降过程中,考虑到突发因素以及飞行环境因素可能会对发动机产生影响,本系统中的加速度计部分将解算出受监视无人机的垂直加速度。当无人机单发/多发失效时,垂直轴向加速度将出现急剧变化。
6.4 禁飞区拦截
根据现有地图并参考飞行区域内机场给出的禁飞区域,本系统使用多个地理坐标点,划定出一电子围栏。当监视无人机距离电子围栏任一边界500m时,上位机将弹出警告,提示入侵危险;当监视无人机距离电子围栏50m时,上位机将弹出紧急情况通告,提醒监视员采取强制方式阻止无人机入侵。
7 结语
本文介绍了无人机三维空域监视设计,从硬件部分元器件选型、核心控制单元及其外设电路设计,到飞行参数解算、上位机设计以及飞行状态评估。将硬件设备搭载到待监视无人机上,可以实现对无人机参数的实时传回与状态监视,为当前无人机监管领域提供有效的技术方案。
本系统设计仍然存在不足之处,比如硬件设计对于当前所有无人机的适配性还未形成完全评估,对于是否可以集成到无人机内部电路还有待考虑。在后续的研发中,本团队将针对不同的无人机机型展开兼容性研究,尽可能将本设计与多个型号的无人机适配。
猜你喜欢
数学物理学报(2021年1期)2021-03-29
家庭影院技术(2020年12期)2021-01-18
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年18期)2018-11-14
车迷(2018年12期)2018-07-26
家庭影院技术(2017年12期)2017-02-06
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01