
基于单片机的一种新型汽车智能大灯设计
2020-06-12 11:38向云南
科技创新与应用 2020年17期
向云南
摘 要:文章介绍一种新型汽车智能大灯,通过灯组的布局改变(“C”型或直列型)以及独立控制各LED灯珠,最终实现汽车在会车时,系统检测会车车距,根据距离远近动态调整大灯的照射范围及照射明暗程度,以保障会车时大灯不会直射来车驾驶员的同时提供自己车辆驾驶员最大的照明视线。汽车转弯时,保持汽车大灯与转向方向一致,同时加大汽车周边的照射角度,以确保对前方道路提供最佳照明,并对驾驶员提供最佳可见度,从而增强黑暗中驾驶的安全性等功能。
关键词:“C”型排列;光线偏转;智能远光
中图分类号:U468.2 文献标志码:A 文章编号:2095-2945(2020)17-0099-02
Abstract: This paper introduces a new type of automobile intelligent headlamp. Through the change of the layout of the lamp group ("C" type or in-line type) and the independent control of each LED lamp bead, the system detects the distance between the meeting car and dynamically adjusts the irradiation range and light and dark degree of the headlamp according to the distance, so as to ensure that the headlamp will not shine directly on the driver while providing the maximum illumination line of sight of the driver of his own vehicle. When the car turns, it is supposed to keep the headlights consistent with the steering direction, while increasing the illumination angle around the car to ensure the best lighting for the road ahead and the best visibility for the driver, so as to enhance the safety of driving in the dark and other functions.
Keywords: "C"type arrangement; light deflection; intelligent far light
1 研究背景
汽車大灯为汽车夜间行驶提供照明,分为近光灯和远光灯,夜间行车要求灯光越亮越好,驾驶员在夜间会车时应关闭远光灯,避免影响对方车辆驾驶员的正常视线。而在实际情况中,总有部分驾驶员在会车时不关闭远光灯,使对面车辆驾驶员因受远光灯强光照射而无法正确判断路面情况,造成危险。
2 总体设计
2.1 设计目的
本文通过对目前汽车大灯中存在的问题进行剖析。确定了汽车智能大灯的设计计划,明确产品设计达到如下要求:(1)增强汽车会车时自己行车方向光线并且减弱对来
车方向灯光照射强度,同时根据对方车辆距离智能偏转灯光照射范围。(2)根据汽车转向角度智能调节“C”型排列中各灯珠的明亮程度,使灯光的聚集点随转向角度改变,使之具有汽车转向随动大灯特点,使汽车驾驶员的前方视野得到保障的同时加大两边的行车视野,增强汽车的夜间行车安全。
2.2 基本思路
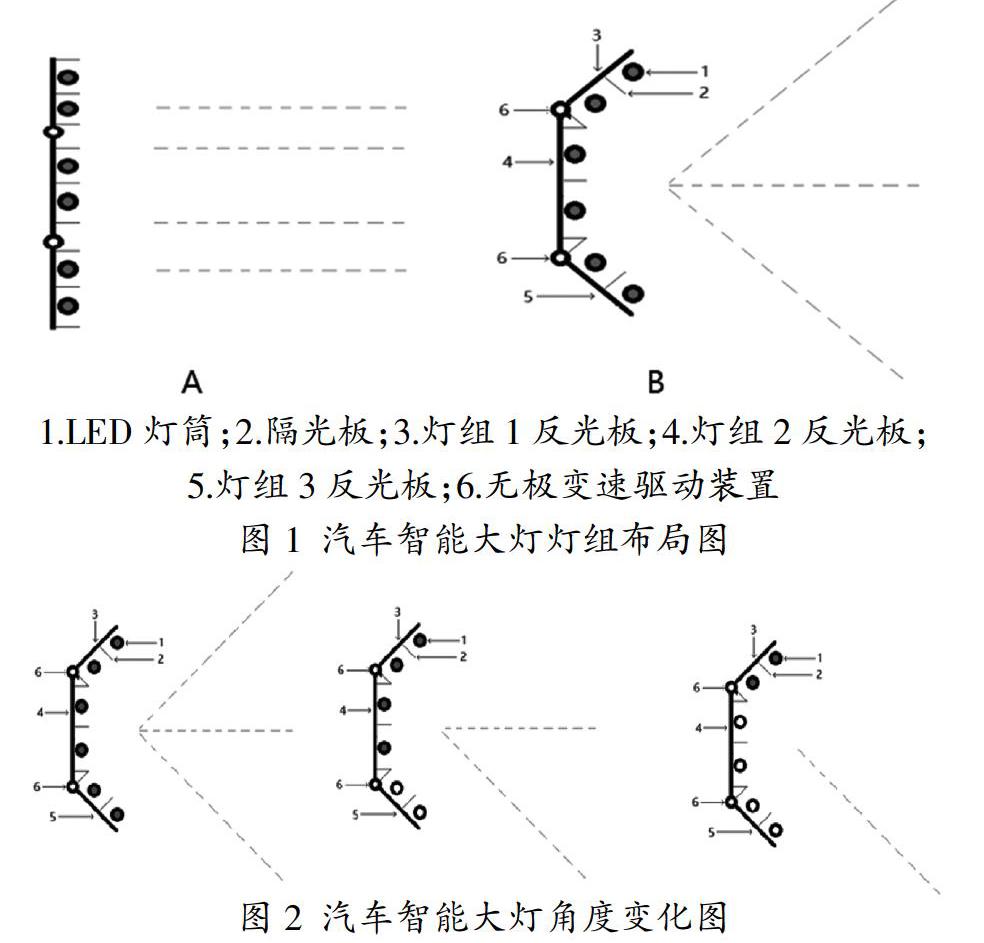
(1)将汽车大灯分成三段,可平行排列(如图1A所
示),可由无级磁驱动成“C”字型排列(如图1B所示),平行排列时可增强正前方照射面积,“C”形排列时可保证前方照射距离的同时增强周边照射范围,由平行到“C”形变换时可改变照射的角度。(2)每个灯珠可由亮到灭自由调节,配合灯组C形变形,可改变照射的强度和照射的角度,使汽车夜间会车和转向时提供驾驶员一个良好的驾驶视野,如图2所示。
1.LED灯筒;2.隔光板;3.灯组1反光板;4.灯组2反光板;
5.灯组3反光板;6.无极变速驱动装置
图1 汽车智能大灯灯组布局图
图2 汽车智能大灯角度变化图
2.3 具体实施方案
汽车智能大灯包括光线传感器、转角传感器、供电模块、单片机、LED驱动、汽车LED一体大灯组成。
(1)光线传感器。光线传感器检测会车时对方车辆灯光的强度,以此来检测会车时与对方车辆的距离。系统通过AD转换器检测光敏电阻的电压值,通过大量的实验得到AD数据表,实际检测值与AD数据表中数据进行比对,从而得到会车时与对方车辆的真实距离,通过距离远近来调节左前大灯的LED各灯珠明亮程度,以此来改变左前大灯的照射距离与照射角度。将光线传感器安装于前档风玻璃内侧,检测头平行地面朝前安装并加装遮光罩,此时光线传感器只对正前方车辆灯光敏感,对侧边和路灯等光源信息不敏感,以避免系统对其他光源做出错误动作,影响汽车智能大灯的正常使用。(2)转角传感器。转角传感器用于检测汽车驾驶员的意图,对汽车转向角度进行检测,在驾驶员转动方向盘时向控制系统发出指令。系统根据检测到的转向角度,合理的控制LED灯珠和灯组电磁转向机构,以得到最大的转向照明视野。将原车的转向角度传感器数据直接接入系统进行运算处理,将系统的接口协议调整成通用形式,不再外接转角传感器,最大程度节约资源、降低成本。(3)控制系统。控制系统用于接收各传感器的指令,通过算法处理后对各LED灯珠进行独立控制(全亮、调光、熄灭)、对电磁转向机构进行精准控制。(4)LED灯组。LED灯组是汽车智能大灯的执行机构,由三组LED灯组(图1中的灯组1、灯组2和灯组3)组成,可由电磁转动机构调节成直列式或“C”字型结构,每个模组包含LED灯筒(灯珠和聚光杯组成)、遮光板和反光板。
3 汽车智能大灯特点
3.1 创新点
(1)“C”型布局,可实现随动转向功能,避免了传统随动转向大灯中复杂的电机转向机构与控制系统。同时采用LED灯珠照明,相比传统的卤素汽车大灯,更加节能环保。(2)改变了现有汽车大灯控制模式,可对大灯内部LED灯珠进行独立控制;通过分别对各LED灯的独立亮度调节,会车时可根据会车距离智能调节大灯对会车区域的照射强度,在不对会车车辆造成对射的前题下最大程度保障已方车辆的道路照明光线,同时也加强了已方右边道路的照射范围与光线,确保夜间会车时双方车辆的行车安全与对道路突发情况的控制能力。(3)对LED灯珠单独加聚光杯,可将传统大灯复杂的反光与聚光装置去除。(4)改变了现有汽车大灯的布局形式,即兼容传统大灯的平行布局,也可实现“C”形布局,从而调节大灯的照射范围。汽车在大角度转向时根据转向角度调节灯光的磁力转动装置,改变“C”字形态,使汽车的大灯照射中心线与大角度转向时轮胎的方向保持一致,形成多角度的照射光线,即有转向方向也有车身两边光线,最大程度减少夜间行车转向时的视线盲区。
3.2 技术关键和理论
(1)光线传感器的检测与安装,为防止路灯和其他侧边车辆对传感器的影响,将光线传感器安装于车前档玻璃内则,检测感应头平行路面向前方放置,并加装遮光罩,确保光线传感器只对正前方来车的灯光信息敏感,对于侧方车辆或路灯的灯光信息不敏感。(2)在夜间会车时,光线传感器会自动检测前方车辆灯光的亮度,系统自动将会车一侧的光线照射范围进行调节。(3)汽车转向时,转角传感器自动检测到方向盘的转角后,系统自动将汽车转向方的大灯照射中心线与转向轮的方向保持一致,另一侧保持不变,让驾驶员有最大的视线范围,保障行车安全。
3.3 主要技术指标
(1)每边大灯由6个灯珠组成,每个灯珠功率3W,最大输出光通量500LM,配合高聚光杯,前照距离可达400米以上。(2)为了有效的解决大功率LED灯的聚光效果,采用特殊铝制聚光杯,可将LED灯的照射距离增加到400米以上而不散光。(3)为了更进一步加大照射角度,采用电磁式转向机构,该机构具备特殊的锁定机构,调节角度时,锁定机构打开,灯组可自由调节组成夹角,调节完成后锁定机构锁定各灯组,确保灯组1和灯组3在汽车行驶过程中不会随车身振动而改变角度。
3.4 科学性与先进性
(1)节能性。每组大灯全开的情况下功率为18W远低于传统大灯的55W功率,而每边智能大灯综合输出光通量接近2000LM却高于传统远光大灯的1200LM,相比传统大灯更亮更节能。(2)先进性。相比传统汽车远光灯120米左右的照射范围,本作品具有更远的照射距离,最远可达400米。相比目前汽车的随动转向系统,本作品的“C”型布局,减少了传统随动系统中复杂的电机转向及控制系统,同时具有更宽阔的照射范围。(3)实用性。本作品能跟据夜间会车距离和转向角度智能调节大灯的照射角度,能给驾驶员一个良好的夜间行车视野,保障夜间行车安全,同时利用高效聚光杯取代传统复杂的反光与聚光装置,使本作品具有较强的实用价值。
参考文献:
[1]汪茂盛.机动车驾驶光污染及视力防护[J].中国眼镜科技,2012,9:132-134.
[2]邓盈.基于智能制造的汽车大灯开关生产设备的设计[J].唐山学院学报,2017,5:84-87.
[3]花建新.浅谈汽车大灯的种类及其优缺点[J].汽车维修,2016,5:4-6.
[4]H.Riedel,A.V Dahl,Chr Lang and F Zywitza.3D Vision Systems for Active Safety[C].SAE 2002 World Congress Detroit,Michigan March 4-7,2002.
[5]李延延.汽車大灯随动系统仿真电路设计[J].中国新技术新产品,2015,11:4-5.
[6]张志辉.基于Flow Simulation的LED汽车大灯散热仿真[J].电子世界,2015,10:60-64.
