
城市道路交通事故预警系统
2020-06-12 09:18李洪奇周倩倩刘艳芳赵艳红
计算机工程与设计 2020年6期
李洪奇,周倩倩+,辛 盈,刘艳芳,赵艳红
(1.中国石油大学 (北京) 信息科学与工程学院 石油数据挖掘北京市重点实验室,北京 102249;2.中国石油国际勘探开发有限公司,北京 100034)
0 引 言
我国在事故预警方面的研究已经涉及到各个方向,如铁路、高速公路、城市道路等交通安全管理和预警,这些研究主要是通过分析道路现状,建立预警模型,确定警限和警兆,从而对交通安全状况进行预警。郑晓鸿[1]调查我国道路安全现状,基于事故形态、事故成因,其中成因包括人、车、路、环境等,建立事故预警指标体系,设计分析了预警系统架构。吴刚[2]提出了基于模糊推理的高速公路事故预警算法,通过交通流的变化状态对道路事故风险进行预警。喻幸[3]提出了利用粗糙集理论对事故因素进行约简,确定各因素指标权重,建立事故预警模型。侯力杨[4]从事故致因角度出发使用BP神经网络对事故进行分级预警。以往的事故预警指标建立大多从人、车、路、环境等因素全面分析,涵盖范围较广,但是存在冗余因素较多的问题,致使重要因素不突出,导致误警。本文在已有研究成果的基础上,以克拉玛依市为例,采用数据挖掘方法探究该市交通事故重要影响因素,指标选取更符合实际道路情况,然后根据事故动态分布规律、人、车、路、环境等事故影响因素,以及道路交通流变化,对事故来源地进行事故预警,并应用到实际的交通管理系统中。
1 研究方法
本文通过历史交通事故对事故进行预警研究,事故预警指标体系主要包括事故分布规律,用于分析事故动态发展过程,以及事故成因分析,通过数据挖掘方法得到事故重要影响因素,建立造成事故的强关联指标集合。如图1所示。

图1 道路交通事故预警结构
1.1 事故预警指标选取
道路交通事故预警指标体系是为了能判断道路的安全状况,因此指标的选取需要具备客观性和全面性,指标之间应相互联系,要能反映出引起事故发生和影响事故严重程度的重要原因。通过查阅相关文献,指标选取需要具备以下几个原则[5]:①可测性:通过数据定量分析和对比,找到事故发生的真正原因,为评价结果提供有利的数据支撑;②可操作性:保证道路交通事故预警在实际应用中的可行性;③独立性:指标之间相辅相成,既有一定的相关性,又相互独立;④阈值识别:构建指标体系时需要确定指标等级,对于分类原则、临界阈值要有较明确的识别标准;⑤灵敏性:评价指标要能灵敏地反映道路交通安全状况,能对危险情况及时预警。
本文以克拉玛依市道路交通事故为研究对象,首先设计了交通事故的水平指标和动态指标,然后从不同方面深入分析了事故动态分布规律的演变过程。其中水平指标包括发展水平、平均发展水平、增长量、平均增长量;速度指标包括发展率、平均发展率、增长率和平均增长率。以2008-2018年该市道路交通事故统计资料为基础,应用基于绝对数的分析指标进行分析,包括定基增长量和环比增长量,定基发展率和环比发展率,主要反映某一时期的事故动态变化的规模、速度和水平。结果表明增长量和增长率所表现的事故发展趋势基本一致。如果只考虑单方面指标,可能会得出错误的结论,不能合理掌握事故分布规律。文中将速度指标和水平指标相结合,互相补充。
事故发生可归结为人、车、路、环境等多维动静态因素耦合失调导致的。本文使用决策树分析方法挖掘事故原因与各影响因素之间的内在规律。图2展示的是各影响因素对分类模型的重要度,可以看出车辆行驶状态、道路物理隔离、车辆种类、天气对于事故发生的影响较为重要。
通过分析决策树模型推理出的规则,并结合克拉玛依市实际道路交通事故情况,事故发生原因多为未按规定让行和超速行驶,这两种违法行为严重影响了道路交通安全。

图2 事故影响因素重要度分析
车辆非直行情况下易发生事故,在阴雨雪天气、道路无物理隔离时发生事故的概率较大,事故发生多为小型汽车,其次是大中型汽车,货车和客车发生事故较多。城市道路上的大中型汽车一方面能影响道路交通流情况,另一方面,数量过多,道路安全水平将大大降低,一旦发生事故,容易造成道路阻塞,甚至会引发二次事故,其造成的危险和损失比小型普通汽车大得多。
为了使预警指标的选取更具可取性和合理性,本文以受伤事故和死亡事故为研究对象,采用两步BIRCH算法进行事故特征聚类,分析不同事故严重程度下影响因素的重要性和差异性。相较于经典的K-means算法,两步BIRCH聚类算法既能处理数值型变量,又能处理分类型变量,并且不用指定聚类数目,不那么依赖于先验知识[6]。由于事故因素较多,同一模式下对全部因素聚类分析容易造成聚类特征中的隐含信息损失,因此,本文将事故影响因素进行重组,分成“责任主体特征”和“事故环境特征”两种模式。
由图3,图4可以看出,在责任主体特征方面,不论是受伤事故还是死亡事故,驾龄较低,尤其是无证驾驶引发的事故较多,受伤事故中发生事故的主体多为小型汽车,死亡事故中大型汽车的事故率也不容忽视。
由图5,图6可以看出,在事故环境特征方面,道路无隔离、无防护的情况下易发生受伤以上的严重事故,除晴天以外的天气也有一定的事故量。一年中晴天占大多数,但是阴、雨雪天气道路安全系数降低,更易导致事故发生。

图3 责任主体特征—受伤事故

图4 责任主体特征—死亡事故

图5 事故环境特征—受伤事故

图6 事故环境特征—死亡事故
1.2 基于事故动态分析的预警指标体系
由于事故因素无法直接量化,因此使用事故数量或事故比例对各项指标进行度量。在影响交通事故的诸多因素中,交通流的稳定程度对交通冲突的大小、道路交通安全有较大影响[7]。因此,本文构建道路交通事故预警指标体系时考虑了交通流状况,该体系是三层结构模型,见表1,分别是目标层A、准则层B和指标层C。
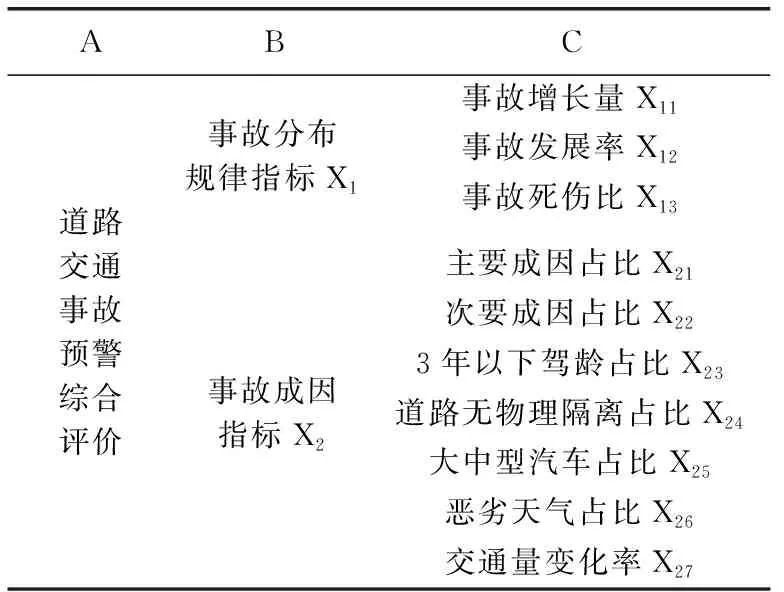
表1 道路交通事故预警指标三层结构
在事故分布规律指标中,X11是事故相对于某一基期的增长量,表征的是交通事故的发展趋势;X12是计算期事故量与基期之比,表征的是交通事故发展速度;X13是事故死亡人数与受伤人数之比,反映的是交通事故严重程度。在事故成因指标中,X21和X22分别是引起事故发生的主要成因和次要成因构成比例,事故原因主要有不按规定让行、超速行驶、酒后驾驶、逆行等。X23属于人为因素,是事故责任人3年以下驾龄(包括无证驾驶)的事故占比,X24属于道路因素,是道路无物理隔离的事故占比,X25属于车辆因素,是肇事汽车中大中型汽车的事故占比。X26表示在雨、雪、雾等恶劣天气中的事故比例。X27是道路交通流量相对于某一时期的变化率。各指标级别越高,对道路安全的影响越大,事故发生的可能性和严重性就越大。
建立道路交通事故预警指标体系过程中,关键环节是确定各个指标的警限值[8-10],本文在设定警限值时主要参考了“工程评价标准”和“交通管理评价指标体系”以及应用了目前国内比较成熟的系统化分析方法,例如使用了多数、半数、少数、均数、众数、负数和参数等原则,每个原则确定一个警限值,综合平均这些警限值,并做适当调整得出各个指标的警限值。表2展示的是成因指标的各等级警限值[11],临界值之间的取值通过模糊综合评价法的隶属度计算来确定等级。事故预警分布规律指标分级标准参见文献[13]的表3。
1.3 道路交通事故预警模型
1.3.1 构建预警模型
事故预警指标权重的确定和事故预警警度的计算是模型构建的重要过程。计算指标权重使用的是层次分析法(AHP)[12],使用模糊综合评价法[13]确定隶属度矩阵,量化各定性预警指标,指标评价由下向上分析,下层指标的评价结果是上层指标综合评价的依据和基础。事故预警模型的构建过程如图7所示。
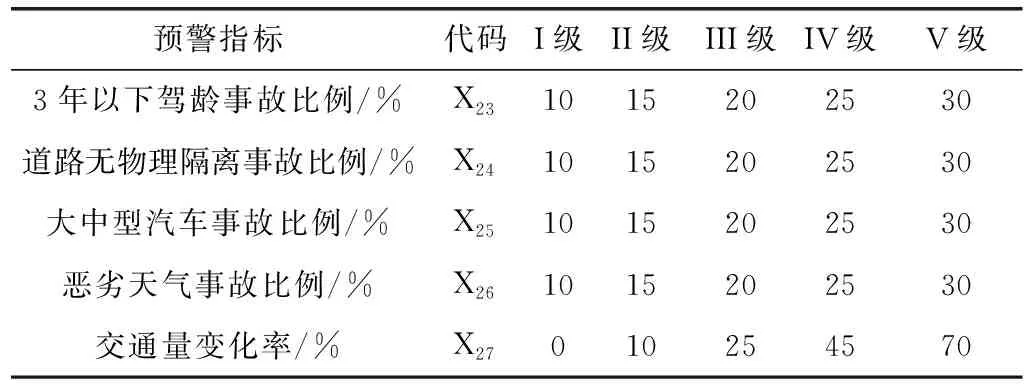
表2 道路交通事故预警成因指标分级标准

图7 道路交通事故预警指标评价过程
通过专家和决策者咨询对预警指标进行两两比较打分,采用1-9标度法构建判断矩阵,运用定性和定量集成的AHP方法确定指标权重。设权重矩阵为A,则权重矩阵构建中的判断矩阵如下
矩阵构建完成后计算每个矩阵的最大特征值,即所求指标的权重。最后使用CR进行一致性检验,若CR<0.10,则认为判断矩阵具有协调性与同步性。CR、CI计算如下

1.3.2 计算预警警度
预警警度的计算采用两层次模糊综合评价,分别是准则层与指标层、目标层与准则层,预警警度计算的具体步骤为:
(1)建立因素集X
根据本文构建的预警指标体系,可得到预警因素集具有两个层次,如下:
第一个层次包含2个因素:X={X1,X2}={事故分布规律, 事故成因分析}。
第二个层次包含Xij(i=1,2;j=1,2,…,7)个子因子,即X1={X11,X12,X13},X2={X21,X22,…,X27}。
(2)建立评价集S
评价集是各指标可作出的所有评判结果,即:Vi={v1,v2,…vn,}(i=1,2,…,n),vi表示评价等级。评价集结构和预警指标因素X对应,同样具有两个层次。
第1层:使用5个级别来表示道路交通安全综合评价,即V={无警、轻警、中警、重警、巨警}。
第2层:和第1层划分等级类似,同样按安全级别从低到高分成5个等级。
(3)指标权重及隶属度计算
应用AHP方法确定各指标的权重,再使用半梯形分布函数计算隶属度,得到指标隶属度矩阵,即量化各预警指标。
假设指标因素集为XT={x1,x2,…,xm},评价集为V={v1,v2,…vn},vj和vj+1是相邻的两级标准,vj+1>vj,则vj级的隶属度函数为
(4)隶属度模糊综合评价
使用模糊综合评价确定第二层的综合评价结果:Bi=(bi1,bi2,…bik)=Ai·Ri(i=1,2)
其中,Ai是计算层对应各指标因素的权重矩阵,Ri是计算层的评判矩阵,i是计算层的指标个数,k是计算层中涉及的子指标个数。分别计算准则层两大类指标和指标层的权重评价,得到的结果B1,B2构造总的评判矩阵R,即目标层的评判矩阵
构造准则层对于目标层的权重向量A=(a1,a2),则目标层的评价结果
由隶属度最大原则得到B中最大值即为事故预警综合等级。
1.3.3 判别预警级别
道路交通状态综合评价分为5个等级,即从I级到V级,分别对应着无警、轻警、中警、重警和巨警,不同预警信号代表不同警度[14]。见表3。

表3 道路交通事故预警等级划分
2 实验分析
本文选择克拉玛依市3个路口为研究对象,分别是昆仑路与胜利路路口、南新路与胜利路路口以及准噶尔路与胜利路路口,数据来源为2018年3个路口上半年的事故数据以及各路口的实时交通流量,事故次数增长量和事故次数发展率指标以1月份为计算基础。通过历史事故数据计算两大类指标下各个子指标对应的指标值,见表4。
整理好相关预警指标数据之后,首先需要使用层次分析法对指标进行打分,构造指标评判矩阵,确定各指标的权重。表5是采用1-9标度法建立标度矩阵后的权重计算和一致性验证。
以昆仑路与胜利路路口为例,应用半梯形分布函数计算各指标的隶属度,得到指标隶属度矩阵,见表6。
计算3个路口的评判矩阵和隶属度矩阵,最终得到昆仑路与胜利路、南新路与胜利路、准噶尔路与胜利路3个路口的交通事故预警综合评价结果,见表7。
根据最大隶属度原则,克拉玛依市昆仑路与胜利路路口、南新路与胜利路路口的道路交通事故预警级别均属第II级,即轻警,预警信号是蓝色,准噶尔路与胜利路路口的预警级别属于第III级,即中警,预警信号是黄色。当预警级别在III级以上(包括III级),系统发出相应的道路交通危险警报。事故预警如图8所示。
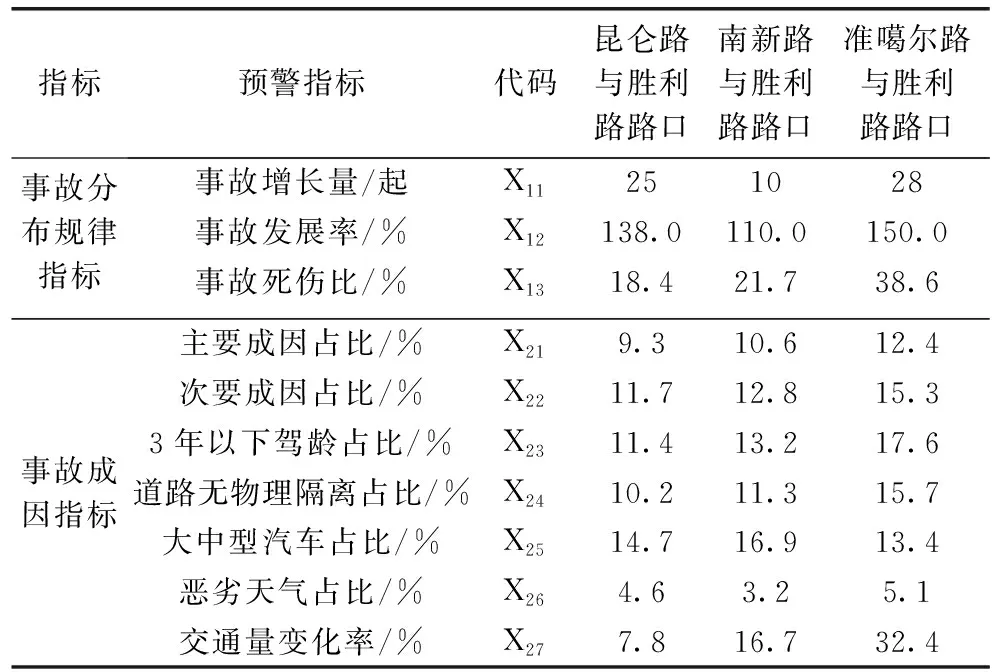
表4 3个路口预警指标数据
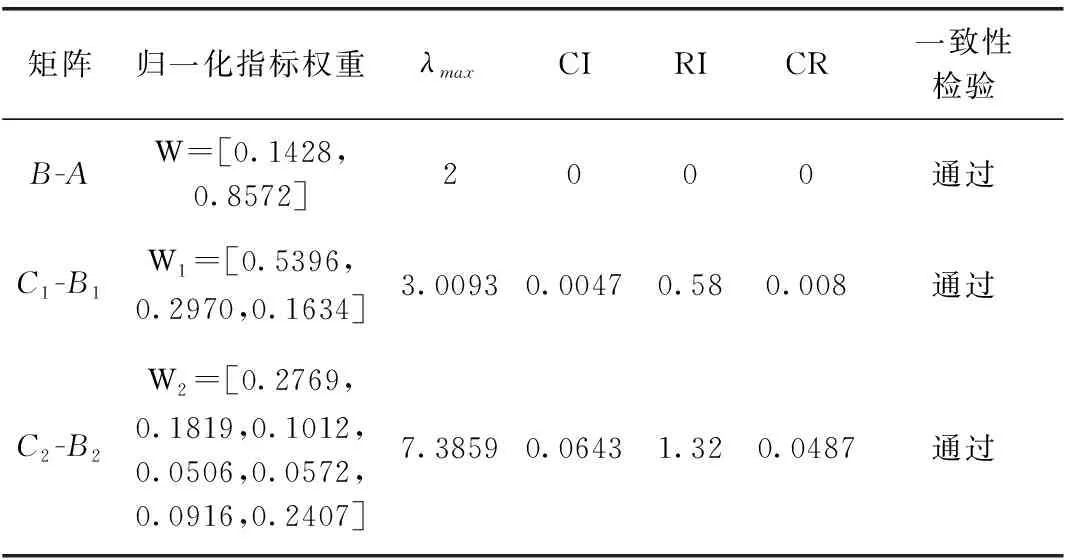
表5 指标权重及一致性检验
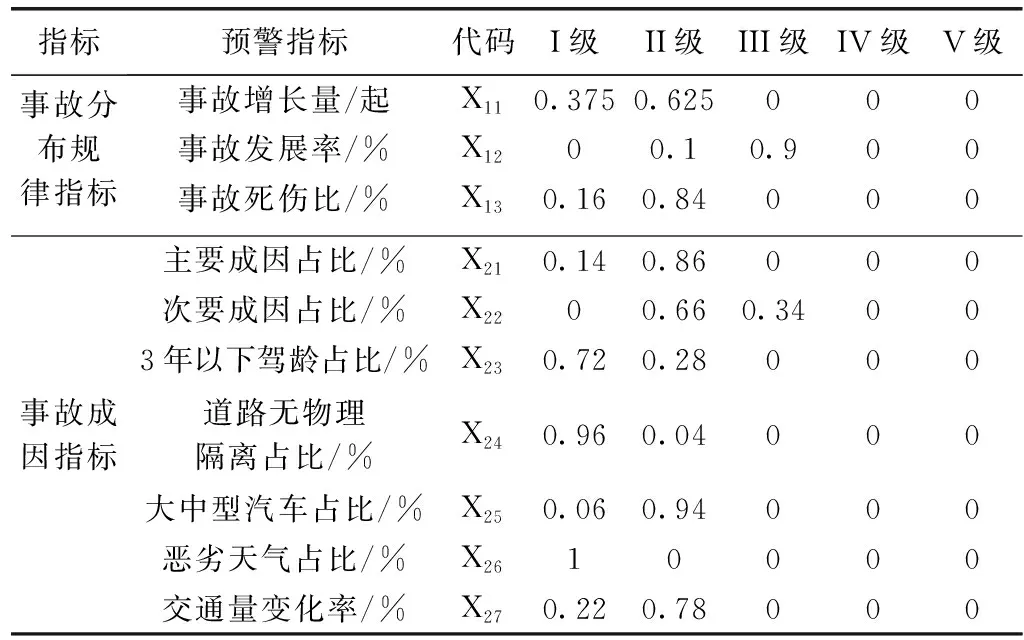
表6 评价指标的隶属度矩阵

表7 各路口模糊综合评价结果

图8 系统主页事故预警信息展示
系统集成了交通事故管理,用于事故分析与预警的数据支持,交通事故因素分析,用于挖掘事故发生与多维因素间的内在规律,以及基于视频的车流量检测功能,交通流量可实时获取,准确率在80%以上,分别如图9、图10、图11所示。经典的关联规则挖掘算法曾被广泛应用于高速公路事故预警,但由于此方法具有多次扫描事务数据库,可能产生庞大候选集等性能瓶颈问题,因此不适合事故实时预警。本文提出的方法从建模到输出结果时间较短,能达到实时预警效果。系统还建立了预警信息数据库,每发布一次事故预警,预警信息都会被保存。这些信息可供交通管理部门参考,在遇到相似事件时可以借鉴历史记录,及时采取合理措施,为提高道路交通安全的管理水平服务。

图9 交通事故管理

图10 道路车流量检测

图11 事故因素分析
3 结束语
本文首先对事故动态分布规律的水平和速度指标进行分析,这比传统的静态方法更能反映事故发展趋势的演变过程。利用决策树和两步聚类方法挖掘分析交通事故严重程度与人、车、路、环境等影响因素的内在关联,构建了动、静态指标结合的道路交通事故预警强关联指标体系。应用层次分析和模糊综合评价法建立了事故预警模型,形成了一套基于事故动态分析的道路交通事故预警系统,快速评判道路交通安全等级,确定道路警情,有利于交通管理部门及时采取措施,对于安全隐患道路加强警力部署和安全指挥,从而提高道路安全水平,预防交通事故的发生。该系统在克拉玛依市实际道路安全管理上起到了一定的指导作用,有效减少了该市道路交通事故。
猜你喜欢
当代陕西(2022年4期)2022-04-19
小猕猴学习画刊(2022年3期)2022-03-28
四川劳动保障(2021年10期)2021-12-02
青年歌声(2020年12期)2020-12-23
小雪花·成长指南(2020年2期)2020-10-12
今日农业(2019年12期)2019-08-13
现代园艺(2017年22期)2018-01-19
灾害医学与救援(电子版)(2016年4期)2016-03-11
火控雷达技术(2016年3期)2016-02-06
读写算·高年级(2015年1期)2015-07-25
