基于主变起火应急演练的虚拟现实培训系统
2020-06-09 10:11郭建龙李晓莹祁彦威吴澄凯
计算机与现代化 2020年5期
郭建龙,熊 山,李晓莹,祁彦威,吴澄凯
(1.广东电网有限责任公司培训与评价中心,广东 广州 510520; 2.广东电网有限责任公司韶关供电局,广东 韶关 512026;3.广州保丽高网络科技有限公司,广东 广州 510665)
0 引 言
采用虚拟现实技术可通过三维图像和视景仿真方法构建虚拟场景,在虚拟场景中结合边界体(Bounding Volume)模型渲染方法设计虚拟视景模型,实现虚拟现实培训。采用虚拟视景仿真技术进行起火应急演练的虚拟现实培训,可以提高火灾的灭火训练能力[1]。相关的主变起火应急演练的虚拟现实培训方法研究受到人们的极大关注[2]。
传统方法中,对应急演练的虚拟现实培训系统设计采用视点筛选控制方法和嵌入式控制方法,这些方法均需将所有必备的数据信息储存为场景图(Scene Graph),根据起火应急演练虚拟视景模型进行优化控制[3],但上述方法的实用性较差。
针对上述问题,本文提出基于主变起火应急演练的虚拟现实培训方法。首先在3D虚拟现实视景模型下进行主变起火应急演练的图像处理模型构建,然后结合主变起火应急演练模糊控制方法进行虚拟现实培训的三维重构,实现主变起火应急演练虚拟现实培训的控制,在虚拟现实系统中进行主变起火应急演练的视景重构,在视点位置中进行主变起火应急演练的3D虚拟现实模拟,实现基于主变起火应急演练的虚拟现实培训设计。最后进行仿真实验分析,展示本文方法在提高起火应急演练的虚拟现实培训和3D视景仿真能力方面的优越性能。
1 主变起火应急演练虚拟视景图像分析和环境参数
为实现基于主变起火应急演练的虚拟现实培训系统设计,需分析图像输出模型,并计算起火应急演练虚拟视景的环境参数,为构建起火视景提供应急演练场所,以提高主变起火应急演练虚拟现实培训的过程自适应性。
1.1 应急演练虚拟视景环境参数
为构建应急演练虚拟视景环境,需计算环境参数。虚拟视景环境设计需对虚拟视景环境图像的单尺度特征进行计算并分解,将分解后的边缘像素集特征信息进行融合。具体计算过程如下:
1)虚拟视景环境图像的单尺度特征获取。
采用分离面裁剪方法进行起火应急演练虚拟视景三维模拟设计过程中的单尺度特征提取[4],特征提取函数为:
(1)
式中,fx和fy分别表示梯度方向上主变起火应急演练虚拟现实培训模型;r表示特征阈值参数。
2)虚拟场景的特征分解。
对提取到的特征进行分解并筛选,在驱动配置程序中进行虚拟现实培训的过程控制,得到起火应急演练虚拟视景三维模拟的单尺度特征分割模型描述为:

(2)
其中F(x,y)为起火应急演练虚拟视景三维模拟颜色特征匹配集,β为像素节点分布范围,ml为子空间样本集度,δl为局部方差。通过对起火应急演练虚拟视景三维模板匹配[5],对起火应急演练虚拟视景进行层次化分解,得到特征分解方程为:
(3)
式中,Ji为最大特征值,Wi为噪声子空间。
3)特征信息融合。
将分割后获取到的有效特征信息进行融合,采用界面渲染和3D建模方法,对起火应急演练虚拟视景模型中的每个边缘像素集进行图像节点信息融合[6],信息融合参数的计算公式为:
(4)
式中,gi表示常数矩阵,gj表示软收缩函数。在纹理映射控制下得到起火应急演练虚拟视景模型设计的细节结构分量和颜色分量,结合特征重构方法,进行起火应急演练虚拟视景重构。
1.2 基于环境参数的图像输出模型
在3D虚拟现实视景仿真环境下进行主变起火应急演练虚拟现实培训系统的图像处理模型设计。采用区域分割方法,提取起火应急演练虚拟视景模型设计场景状态信息Ψp与起火应急演练虚拟视景区域块匹配的置信度Cp,结合自适应块分割方法,得到起火应急演练虚拟视景仿真的纹理渲染中心特征量为x1,x2,…,xN,采用图模型匹配方法,进行起火应急演练的虚拟视景三维模拟设计[7]。采用纹理特征分割方法,得到起火应急演练虚拟视景模型分割线,标记为Hp=-jω,其中ω表示场景数据库中的关联系数。在N×N块区域内,进行主变起火应急演练虚拟现实培训环境图像的特征关联匹配,图像特征关联匹配函数为:
(5)
根据式(5)读取匹配数据,结合视场控制方法,得到主变起火应急演练虚拟视景的图像梯度信息:
(6)
式中,λ表示图像像素梯度值。根据图像梯度信息,结合图像压缩感知方法构建图像输出模型,模型表达式为:
(7)
其中,R表示环境光强。按照样本模板尺寸匹配方法,对主变起火应急演练虚拟视景的图像输出模型进行参数设定,从而构建虚拟演练环境,提高应急演练虚拟现实仿真的人机交互性[8-9]。
2 主变起火应急虚拟演练环境设计
结合上文中的虚拟视景图像分析和环境参数设计,对主变起火应急虚拟演练环境进行优化设计,整体流程如图1所示。
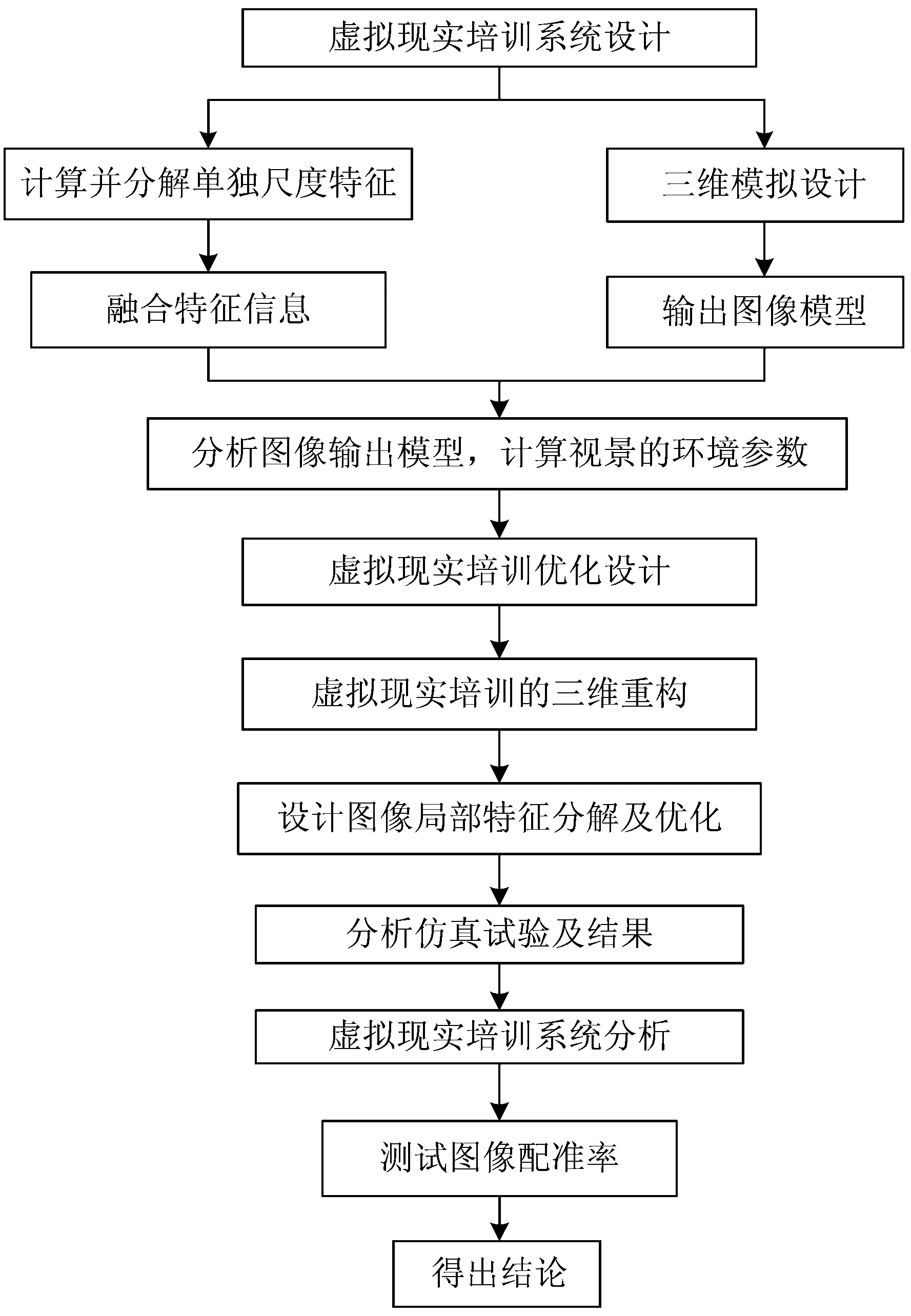
图1 主变起火应急演练虚拟现实流程图
2.1 虚拟现实培训的三维重构
在3D虚拟现实视景模型下进行主变起火应急演练的图像处理模型构建的基础上,进行虚拟现实培训优化设计。结合主变起火应急演练模糊控制方法[10]进行虚拟现实培训的三维重构,对原始起火应急演练虚拟视景三维模拟图像[11-12],通过信息增强处理[13-14],得到虚拟现实技术下的起火应急演练虚拟视景输出为:
(8)
其中,ux和uy为表示起火应急演练虚拟视景三维模拟的边缘像素集,Ci表示起火应急演练虚拟视景三维模拟色差均衡系数。在虚拟现实系统中进行主变起火应急演练的视景重构,在视点位置中进行主变起火应急演练的3D虚拟现实模拟[15],得到起火应急演练虚拟视景三维模拟设计的规则性基函数为:
(9)
式中,wnk是选定区域的每个起火应急演练虚拟视景模型的特征点,提取起火应急演练虚拟视景三维特征,并结合灰度特征分布集进行信息重构:
WSSIMHi=ωHLiWSSIMHLi+ωLHiWSSIMLHi+ωHHiWSSIMHHi
(10)
运用Radon尺度变换进行Haar-like特征重构,得到起火应急演练虚拟视景仿真模型为:
g(x,y)=f(x,y)+ε(x,y)
(11)
其中,f(x,y)、ε(x,y)分别代表邻域内在模糊度函数和隶属度函数。基于Haar-like特征实现起火应急演练虚拟视景三维模拟,起火应急演练虚拟视景区域控制系数为:
(12)
以MLL为控制变量,使用OpenFlight的建模方法进行虚拟现实培训的三维重构,构建结果如图2所示。

图2 主变起火应急环境模拟
通过上述构建主变起火应急环境模拟,用于虚拟现实培训,但该方法的模拟结果较为模糊,为此,需对其进行优化。
2.2 虚拟培训模型优化
结合主变起火应急演练模糊控制方法进行虚拟现实培训的三维重构,实现主变起火应急演练虚拟现实培训的控制[16],把S帧图像归纳为R个种类,进行起火应急演练虚拟视景三维模拟设计图像局部特征分解,表示为:
(13)
其中x′=xcosφ+ysinφ,y′=-xsinφ+ycosφ,分别表示起火应急演练虚拟视景网格分块的反射不变矩和中心距,结合场景模型元素分解方法[17],得到起火应急演练虚拟视景模型设计的标准误差为θ=tan-1(V/U),初始化权重,当yi=1时,w1,i=1/2m,根据场景状态信息和渲染指令进行起火应急演练虚拟视景三维模拟的渲染控制,得到渲染结果输出为:
(14)
对集合层的图像边缘像素数据进行层次结构化设计[18],在虚拟现实系统中进行主变起火应急演练的视景重构,在视点位置中进行主变起火应急演练的3D虚拟现实模拟[19],得到起火应急演练虚拟视景控制优化模型为:
(15)
gkv(zl)+ek≥1-β,ak=k
(16)
gkv(zl)+ek<-1+βl,m,ak≠k
(17)
通过式(15),完成起火应急演练虚拟培训模型优化,优化效果如图3所示。

图3 主变起火应急环境模拟优化
综上分析,经过图2到图3的图像边缘像素数据设计,这种虚拟模拟现实的图像优化使得边缘界限分明,对比度更加明显,场景更加清晰,利于在视点位置中进行主变起火应急演练的3D虚拟现实模拟,通过Vega Prime进行应用程序加载,结合帧处理方法进行场景更新[20-22],实现基于主变起火应急演练的虚拟现实培训设计。
3 仿真实验与结果分析
为了测试本文方法进行起火应急演练的虚拟现实培训仿真中的应用性能,在Mutigen Creator和嵌入式开发环境下进行培训系统的虚拟现实仿真实验,采用Socket编程构建的主变起火应急演练虚拟现实培训的串口接收控制,结合ActivityGroup软件进行主变起火应急演练的虚拟现实培训系统分析,设定图像虚拟视景成像的像素点数为20~120,搜索时间为1.25 ms,学习率设置为0.68,得到起火应急演练的3D虚拟仿真的主界面如图4所示。

(a)救火视角

(b)逃生视角
在图4的界面中,进行主变起火应急演练的虚拟现实培训,灭火场景如图5所示。

图5 灭火场景
在该视景重构下,分别对本文方法、视点筛选控制方法(DF)和嵌入式控制方法(MIL)测试帧跟踪速率,得到结果见表1。
表1 帧渲染速度(帧/s)

视频序列DFMIL本文算法救火场景9.651.7846.78逃生场景3.671.655.64灭火场景7.651.4659.67
分析表1得知,所在的视频序列渲染速度的值中全部高于DF及MIL,说明采用本文方法进行主变起火应急演练的虚拟现实培训设计,视景画面的帧渲染速率较高。
测试不同方法进行起火应急演练的虚拟现实培训的图像配准率,得到对比结果见表2。
表2 特征配准率对比
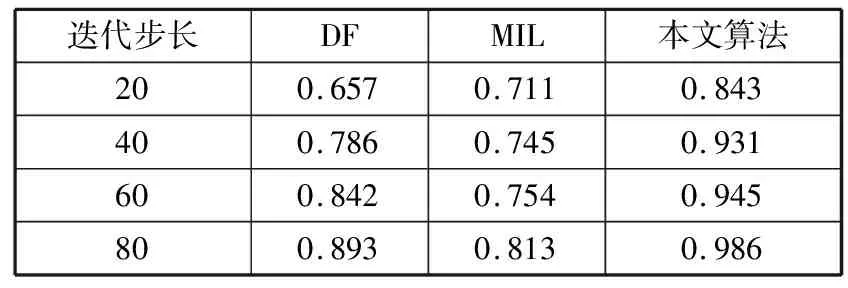
迭代步长DFMIL本文算法200.6570.7110.843400.7860.7450.931600.8420.7540.945800.8930.8130.986
分析表2得知,视点筛选控制方法(DF)和嵌入式控制方法(MIL)测试帧跟踪速率在不同的迭代步长下有不同的匹配率,本文提出的算法在表2的匹配率对比中皆高于前2项,说明采用本文方法进行主变起火应急演练的图像特征配准率较高。
4 结束语
根据主变起火应急演练虚拟视景变化进行虚拟现实仿真设计,提高火灾应急能力。本文提出基于主变起火应急演练的虚拟现实培训方法是在3D虚拟现实视景模型下进行主变起火应急演练的图像处理模型构建。采用特征检测方法进行主变起火应急演练场景环境参数计算,构建火灾应急演练的图形界面分析模型,结合演练模糊控制方法进行虚拟现实培训的三维重构,实现主变起火应急演练虚拟现实培训的控制,在虚拟现实系统中进行视景重构,在视点位置中进行主变起火应急演练的3D虚拟现实模拟,实现基于主变起火应急演练的虚拟现实培训设计。对比实验结果得知,本文方法进行主变起火应急演练的虚拟现实培训的图像处理性能较好,配准率较高。
猜你喜欢
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年3期)2018-06-26
中学生数理化·高一版(2018年2期)2018-04-04
中国环境监察(2016年12期)2016-10-24
云南电力技术(2015年1期)2015-03-02
舰船科学技术(2015年8期)2015-02-27
振动、测试与诊断(2014年4期)2014-03-01
空间控制技术与应用(2009年2期)2009-12-20
中学生英语·中考指导版(2008年8期)2008-12-19