数据中心巡检机器人信息平台实时任务容错调度算法
2020-06-09 10:11胡全贵赵恩来贾伟昭开北强
计算机与现代化 2020年5期
胡全贵,赵恩来,贾伟昭,开北强
(北京国网信通埃森哲信息技术有限公司,北京 100032)
0 引 言
数据中心巡检机器人是通过机器人实现智能巡检的机器人,可通过集成的信息管理平台实现机器人的智能控制信息处理,提高机器人的实时信息分析和控制能力。随着信息管理和信息系统的发展,设计数据中心巡检机器人信息平台,通过对数据中心巡检机器人信息平台的任务优化调度,提高数据中心巡检机器人信息处理和集成调度能力,与此相关的数据中心巡检机器人信息平台的实时任务容错调度方法研究受到人们的极大关注[1-2]。
数据中心巡检机器人信息平台实时任务是建立在信息大数据融合处理基础上,通过建立数据中心巡检机器人信息平台实时任务传输模型,通过信道均衡控制方法,进行数据中心巡检机器人信息平台实时任务调度,提高信息的集成收发控制能力[3-4]。文献[5]提出一种非周期不可抢占式异构分布式的动态容错模型,基于该模型在满足调度差异需求的基础上,提出一种新型容错调度方法——DRFSA算法(即基于容错调度算法的混合动力与可靠性驱动,Dynamic and Reliability-driven of hybrid with Fault-tolerant Scheduling Algorithm)以提高可靠性代价为调度目标,通过合理调度提高系统可靠性,DRFSA算法以可调度性为调度目标,通过减少任务执行时间来增加系统可调度性。算法能够在异构系统中调度动态的实时任务,且能够尽可能响应任务需求。但该方法进行数据中心巡检机器人信息平台任务调度的容错性不好,抗干扰能力不强。文献[6]针对关键数据与非关键数据混合传输场景,建立系统模型,对系统的容错传输能力进行分析,得出混合数据的容错传输规律,然后在进行容错传输调度的基础上,利用EDF容错算法,基于非抢占式的需求进行容错系数比例计算。同时对计算的过程实时监控,保障核心数据在其截止期之前优先传输,最终完成一次容错调度算法研究。文献[7]提出一种针对多核平台分区操作系统的安全关键任务调度方法。判断系统是否包含安全关键任务并将其分为关键分区和非关键分区。在系统层通过资源划分的方式确保关键分区的独立运行,根据分区利用率确定最小资源极值,在安全区域内提高任务调度的可靠性和准确性,使操作系统的资源合理利用效率得以提高。文献[8]提出具有时变惯性不确定性的自适应容错调度跟踪控制。研究了存在参数不确定性、执行器故障和外部干扰的自适应姿态跟踪控制问题。建立了基于单容的动力学模型,该模型明确考虑了质心的变化。然后提出了一种实现姿态跟踪的控制方案,该方案在控制器设计过程中充分考虑了可能出现的变化,对参数不确定性具有很好的鲁棒性,且油耗较小。最后,通过数值仿真验证了所提控制器的有效性。文献[9]提出具有加工集约束的均匀机器调度的任务容错调度算法,考虑在一组统一的机器上非自由地调度一组独立的作业的问题,其中每个作业都有一组可以分配给它的机器。这种限制称为处理集限制。主要考虑2种情况:“包含处理集”和“树层次处理集”。给出了2种情况下的快速近似算法,并表明它们都具有最坏情况下的4/3的性能界限。
针对上述问题,本文提出一种基于自适应反馈均衡和码元调制技术的数据中心巡检机器人信息平台实时任务容错调度模型。首先构建巡检机器人信息平台传输信道模型,然后构建数据中心巡检机器人信息传输优化协议,采用模糊C均值聚类的方法融合巡检机器人性能检验,设计仿真实验进行验证,其实验结果表明,本文所设计的方法有利于机器人信息平台实时任务调度,在容错调度方面性能优越。
1 巡检机器人信息传输信道模型及传输协议优化
1.1 数据中心巡检机器人信息平台传输信道模型
为了实现数据中心巡检机器人信息平台实时任务容错调度,建立传输信道模型,在路由冲突模式下构建巡检机器人数据平台,由此分析数据中心巡检机器人信息平台的任务传输链路集。采用匹配滤波检测方法进行数据中心巡检机器人信息平台实时任务调度和干扰抑制,得到传输信道模型。
数据中心巡检机器人信息平台实时任务容错调度模型进行输出转换控制,采用传输信道均衡方法进行数据中心巡检机器人信息平台实时任务输出转换控制,构建任务调度的传递函数表示如下:
fij=wtδt+wcδc+wqδq+wsδs
(1)
其中,w、δ分别表示任务调度传递过程中的数据流量和耗电量。wt+wc+wq+ws=1,t表示数据中心巡检机器人信息平台实时任务所需时间的间隔分布,即time;c表示任务调度传递过程中的存储开销代价,即cost;q代表任务调度质量结果,即quality;s代表数据中心巡检机器人信息平台实时任务调度的安全性能特征,即security。考虑网络智能效果的因素,在最大化约束的情况下,提出信道平衡分配实施策略,以此构建实时检测任务容错调度的分集聚敛模型[10]。考虑任务流量特征的综合分布状况,采用关联规则算法,进行数据中心巡检机器人信息平台实时任务容错调度,得到迭代方程为:
(2)

构建路由冲突下数据中心巡检机器人信息平台信息传输的信道模型。再考虑信息智能管理系统中任务调度信息数据传输性能的因素,在输出过程中需进行转换结果控制,由此得到任务调度的最小二乘规划模型表达式如下:
(3)
其中,c1和c2为常数,φ1、φ2和p分别表示1号机器人输出过程中的电消耗、2号机器人输出过程中的电消耗和2个机器人输出过程中的能量总消耗。
采用ZigBee传感组网设计方法进行数据中心巡检机器人信息平台实时任务调度的物联网设计,得到数据中心任务调度的优先级属性分布为:
v(t+1)=ωv(t)+φ(p-x(t))
(4)
x(t+1)=x(t)+v(t+1)
(5)
其中,v表示机器人运行速度,ω表示机器人自身信息传播参数。
根据上述分析,构建数据中心巡检机器人信息平台传输信道模型,在最优传输控制协议下,实现机器人信息平台传输优化和容错性调度[11]。
1.2 任务传输协议优化
分析数据中心巡检机器人信息平台的实时任务传输模型,优化数据中心巡检机器人信息传输协议,再结合自适应的反馈均衡性控制方法进行数据中心巡检机器人的传输信道均衡设计,实时任务容错调度的转发控制协议描述为:
x(t+1)+(φ-w)x(t)=φp
(6)
在最大化网络吞吐量控制下,进行数据中心巡检机器人信息平台实时任务调度的最优化解集评判,得到最优解集评判特征量满足u(t)∈L2(R),其中,u、L和R分别代表机器人网络吞吐量的参数、网络吞吐量和机器人运行中的电阻。则u(t)的评判函数定义为:
φws(s,τ)=|χws(s,τ)|2
(7)
其中,φ代表机器人运行中网络数据传播数量,且:
(8)
采用模糊关联规则调度方法进行路由冲突下数据中心巡检机器人信息平台传输的最佳性能调度结构设计,在大数据中择优选取关联模拟特征量,在分布均匀的向量集中进行巡检机器人信息数据传输的优化处理[12-13]。用t/a代替t进行巡检机器人信息输出的随机均衡控制,得到巡检机器人信息平台的任务容错调度自适应函数定义为:
(9)
(10)
其中,μ代表路由器数据参数,H代表路由器在运行时候的数据吞吐量,下标i表示任务传输序列,对任务传输序列进行优先级评判[14]。计算排队时延,任务流的优先级属性的约束关系为:
(11)
其中,p、α和y分别表示任务传输序列总和、参数和起始数据。
由此构建数据中心巡检机器人信息传输优化协议,根据优化的传输协议进行任务调度。
2 任务容错调度算法优化
2.1 巡检机器人信息融合
在完成数据中心巡检机器人信息平台传输信道模型后,基于路由冲突下进行数据中心巡检机器人信息平台实时任务容错调度算法的优化设计,本文提出一种基于自适应反馈均衡和码元调制技术的数据中心巡检机器人信息平台实时任务容错调度模型,定义巡检机器人信息传输的均衡配置系数如下:
bm=t0(1-a)
(12)
利用能量平衡控制模型,获得数据中心巡检机器人信息平台中云计算节点间的能量传输控制功能,其函数表达式为:
fia(t)=fi(t+bm)
(13)
结合最优时延均衡方法,进行数据中心巡检机器人信息平台实时任务调度的均衡控制,通过多址协议参数设置,得到虚拟任务调度中的调度控制集合[15-16]。其实时任务容错调度的迭代函数为:
(14)
在云计算平台上,对数据中心巡检机器人信息平台中的虚拟任务进行任务优先级控制。实时任务容错调度的控制模型表达式如下所示:
(15)
其中,F(x)、f1(x)、f2(x)和fm(x)分别表示虚拟任务进行任务优先级起始数据、第1个虚拟任务进行时的优先级数据、第2个虚拟任务进行时的优先级数据和第m个虚拟任务进行时的优先级数据。
计算排队时延并优化任务调度集,得到数据中心巡检机器人信息传输的特征分布集满足:
(16)
V={vij|i=1,2,…,c,j=1,2,…,s}
(17)
根据扩频结果,得到数据中心巡检机器人信息平台的任务调度模糊聚类模型,根据上述分析,构建了巡检机器人信息融合模型,根据信息融合结果,进行任务容错调度算法的优化设计[19-20]。
2.2 自适应反馈均衡及任务容错调度
建立数据中心巡检机器人信息平台实时任务的输出转换控制模型,模糊聚类处理数据中心巡检机器人信息,此过程采用模糊C均值聚类的方法,得到任务容错调度模型中有n个输入控制参量,m个输出参量,数据中心巡检机器人信息平台的传输任务集合为P(ni)={pk|prkj=1,k=1,2,…,m},其中,prkj表示巡检机器人的输出转换控制信息输出总量。建立优先级属性列表,得到实时任务容错调度迭代方程为:
(18)
在节点的分布状态下的任务信息集合中含有n个可控样本变量,数据中心巡检机器人信息管理系统中的任务调度集RTTs的表达式如公式(19)所示:
RTTs=(1-α)RTTs+αRTT
(19)
假设数据中心巡检机器人信息平台的管理处理机pi执行调度任务nj的有效传递函数DR(pi,nj)定义为:
DR(pi,nj)=tsdPET(pi,nj)
(20)
其中,PET(pi,nj)表示数据中心巡检机器人信息平台的管理处理机pi执行调度任务nj的无效传递函数。构建M轮调度集[21-22]。得到数据中心巡检机器人信息平台进行实时任务调度的输出吞吐量为:
2.7 图表 每幅图单独占1页,集中附于文后,表格随正文附出。图表应按其在正文中出现的先后次序连续编码,并应冠有图(表)题。说明性的资料应置于图(表)下方注释中,并在注释中标明图表中使用的全部非共知共用的缩写。本刊采用三横线表(顶线、表头线、底线),如遇有合计或统计学处理行(如t值、P值等),则在此行上面加一条分界横线;表内数据要求同一指标有效位数一致,一般按标准差的1/3确定有效位数。线条图应墨绘在白纸上,高宽比例为5∶7左右。计算机绘制图者应提供激光打印图样。凡能使用文字表达清楚的内容,尽量不用表和图,如使用表和图,则文中不必重复其数据,只需摘述其主要内容。
其中,Tinter、M和N分别表示数据中心巡检机器人信息平台进行实时任务调度的输出吞吐量、行数和列数。
结合自适应反馈均衡方法进行巡检机器人信息传输的信道均衡设计,建立数据中心巡检机器人信息平台实时任务调度的空间动态规划模型,以此得到随机性调度输出公式为:
(22)
根据上述分析,采用码元调制方法进行信息平台的实时任务容错调度,结合自适应转发控制解调技术进行实时任务容错调度的冲突规划设计[23]。实现流程如图1所示。
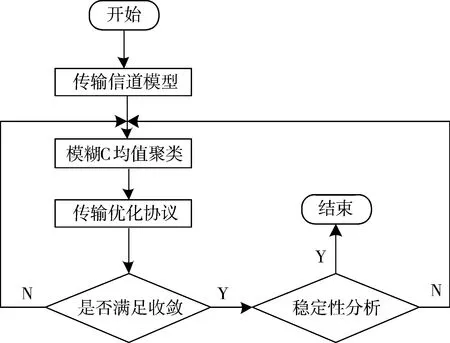
图1 任务容错调度的冲突规划算法实现流程
3 仿真实验与结果分析
3.1 实验环境及实验指标
为了验证本文所设计方法的可行性以及在实现数据中心巡检机器人信息平台实时任务容错调度中的应用性能,结合Matlab进行仿真实验分析。实验数据选自艾瑞数据(数据库网址为http://www.iresearch.cn),数据中心巡检机器人的信息传输延迟为12.6 ms,实时任务容错调度的带宽是12 dB~20 dB,对数据中心巡检机器人信息采样的频率为16 kHz,实时任务容错调度的数据量从100 MB到1 GB增长。
实验指标如下:
1)任务容错调度的延迟:指信息调度过程中,一个报文或分组从一个网络的一端传送到另一端所需要的时间。对一个网站终端发送任务数据包,看接收方是否符合限定要求,以此实现网络调度的性能。
任务容错调度的延迟计算公式如下:
(23)
其中:f表示容错调度时延;l表示数据帧长度,单位为bit;v表示调度速率,单位为bit/s。
2)调度任务规模:调度任务规模是指在一定约束条件下,将网络分配的符合条件的任务调配到规定任务中的合理范围内,以此作为判断调度精度的指标。
3)容错成功率:容错率就是容许出现失误的几率。容错成功率得到保证,可以在一定程度上增加调度的可靠性。通过将相关数据输入到Excel函数中加以计算。
3.2 任务容错调度的延迟对比分析
将本文算法与文献[5]动态实时容错调度启发式算法、文献[6]关键数据一次容错调度算法、文献[7]安全关键任务调度方法、文献[8]具有时变惯性不确定性的自适应容错调度跟踪控制算法和文献[9]加工集约束的均匀机器的任务容错调度算法加以对比分析。根据上述仿真环境和参数设定,进行数据中心巡检机器人信息平台实时任务容错调度,得到调度序列如图2所示。
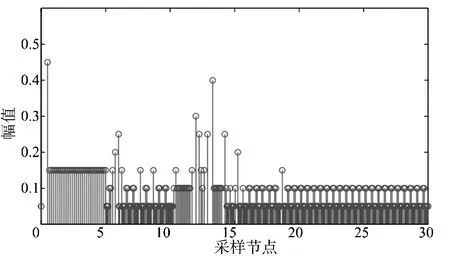
图2 信息平台实时任务序列
采用反馈均衡方法进行巡检机器人信息传输的信道均衡设计,结合码元调制方法进行信息平台的实时任务容错调度,根据优化后的调度结果,其输出模式如图3所示。
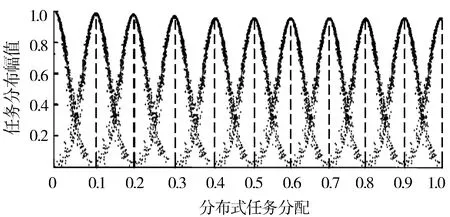
图3 优化后任务调度输出
根据图3可知,本文算法能有效实现数据中心巡检机器人信息平台实时任务调度,调度的容错性较好。测试调度时延,在比较文献[5]算法、文献[6]算法、文献[7]方法的基础上,对比分析文献[8]算法和文献[9]算法,得到实时任务容错调度的延迟对比结果见表1。
表1 实时任务容错调度的延迟对比 单位: s
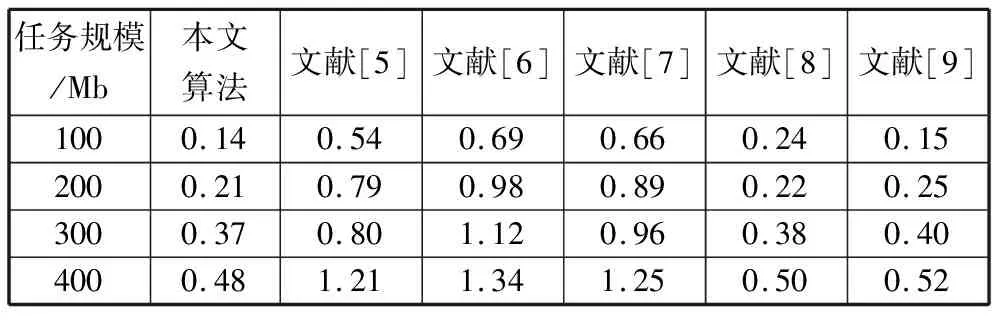
任务规模/Mb本文算法文献[5]文献[6]文献[7]文献[8]文献[9]1000.140.540.690.660.240.152000.210.790.980.890.220.253000.370.801.120.960.380.404000.481.211.341.250.500.52
分析表1得知,本文算法进行数据中心巡检机器人信息平台实时任务容错调度的延时较短,调度性能较好。在任务规模为100 Mb~200 Mb时,文献[5]算法、文献[6]算法、文献[7]方法的调度延时平均为本文算法的4倍到5倍。文献[8]算法和文献[9]算法的调度延时略高于本文算法。本文算法构建的数据中心巡检机器人信息平台传输信道模型,在最优传输控制协议下,实现机器人信息平台传输优化和容错性调度,保障了任务容错调度效率,降低了调度时延。不过本文算法也还存在未考虑之处:一方面,它未考虑样本矢量中各维特征对分类的不同影响;另一方面,也未考虑不同样本矢量对任务容错调度效果的不同影响。
3.3 测试调度任务规模对比分析
测试调度任务规模,得到对比结果如图4所示。分析得知,本文算法进行数据中心巡检机器人信息平台实时任务容错调度的精度较高。
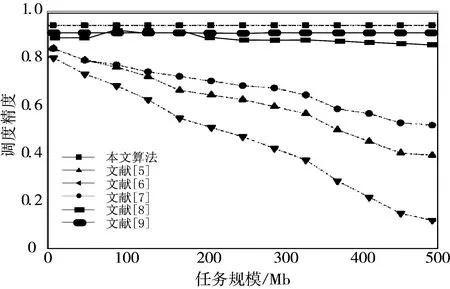
图4 任务容错调度的调度规模
由图4可以看出,在任务规模不断扩大的过程中,本文算法调度精度接近于100%,文献[5]、文献[6]和文献[7]调度算法的调度精度呈现下降趋势,尤其是文献[6]算法下降速度最快,且当任务规模达到500 Mb时低至0.1。文献[8]和文献[9]任务容错调度算法的调度精度接近本文算法,远远高于文献[5]、文献[6]和文献[7]调度算法,主要原因在于本文算法进行数据中心巡检机器人信息平台实时任务调度的容错性较好,信息平台的信道均衡性较强。本文算法进行实验操作,在数据中心巡检机器人信息平台的调度性能强,任务实时掌控效果佳,任务调度精度准确性较好,测试调度任务规模控制在合理范围内。
3.4 容错成功率对比分析
依据实验数据,使用本文算法和文献[5]算法、文献[6]算法、文献[7]方法、文献[8]算法和文献[9]算法依次进行实验操作,共操作1000次,容错成功率与错误发生时间点的关系如图5所示。
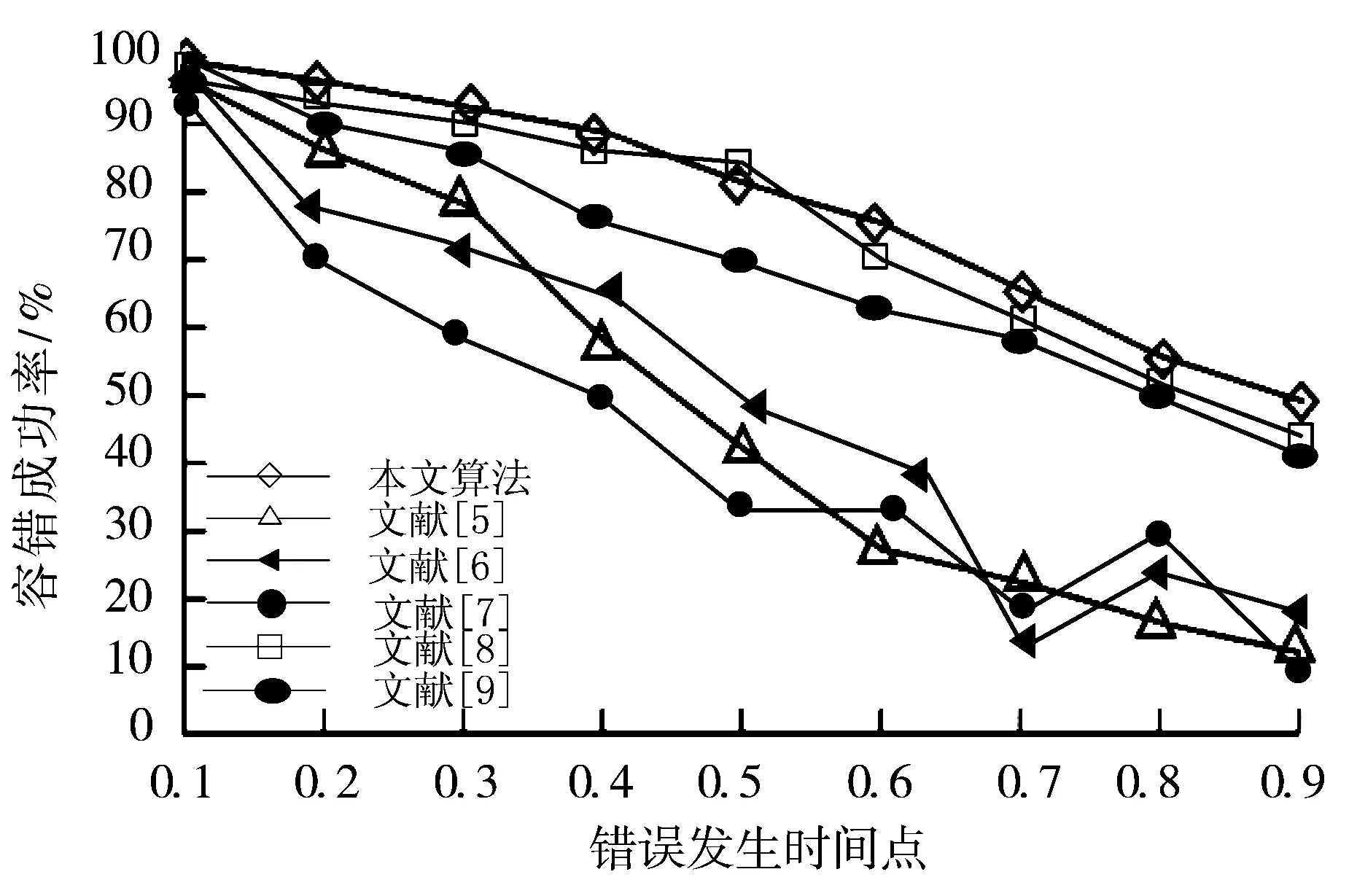
图5 容错成功率与错误发生时间点的关系
由图5可以看出,相较于简单容错算法,在任务执行后期发生错误的情况下,本文算法能够提高50%左右的容错能力。文献[8]和文献[9]算法的容错成功率接近本文方法,呈现下降的趋势,而文献[5]、文献[6]和文献[7]算法在错误发生时间点前期呈现下降的趋势,随着时间点的迁移,在0.7到0.8时,呈现上升趋势。本文所采用的实时任务容错调度算法的错误发生时间点最终控制在0.9,采用实时任务容错调度算法,能够通过优先级提升的方式保证较高的关键容错能力,大幅提升了系统任务调度的可靠性。在容错成功率对比分析的基础上,分析模糊C均值聚类,其是统计模式识别中无监督模式分类的一个重要分支,在众多的实现方法中模糊C均值算法成为最流行的算法之一,在一定程度上,对于本文算法起到一定的促进作用,但是随着随机性降低其鲁棒性也降低。本文算法在实验情况下未考虑随机性对鲁棒性影响的具体的性能分析,因此在以后的研究中可以就随机性对鲁棒性的影响进行具体分析。
4 结束语
基于数据中心巡检机器人信息平台,通过对数据中心巡检机器人信息平台的任务优化调度,为提高数据中心巡检机器人信息处理和集成调度能力,本文提出了一种基于自适应反馈均衡和码元调制技术的数据中心巡检机器人信息平台实时任务容错调度模型,采用模糊关联规则调度方法进行路由冲突下数据中心巡检机器人信息平台传输的最优调度设计,提取待调度任务的关联特征量,结合自适应反馈均衡方法进行巡检机器人信息传输的信道均衡设计和容错性调度。本文算法创新点如下:一是构建了巡检机器人信息融合模型;二是对数据中心巡检机器人信息平台中的虚拟任务进行任务优先级控制。根据研究可知,本文算法进行数据中心巡检机器人信息平台任务调度的实时性和容错性较好。
猜你喜欢
机械研究与应用(2022年4期)2022-09-15
建材发展导向(2021年7期)2021-07-16
数字通信世界(2020年3期)2020-04-06
铁道通信信号(2020年10期)2020-02-07
电子制作(2019年20期)2019-12-04
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
西藏艺术研究(2019年1期)2019-09-04
制造技术与机床(2019年4期)2019-04-04
现代防御技术(2016年1期)2016-06-01