
三维声呐系统在水工建筑物水下结构检测中的应用
2020-06-04 01:08:50郭树华
陕西水利 2020年4期
郭树华,张 震
(上海勘测设计研究院有限公司,上海 200434)
1 概述
目前,国家对于水工建筑物的维修与加固投资逐渐加大,如何对水工建筑物维修加固、改建或重建提出科学合理的决策,这就需要对水工结构进行安全检测并评价其安全类别。其中,最重要的是做好水工结构的安全检测工作,检测结果不但是评价水闸的重要依据,也是复核计算的基础。
常规的水闸工程安全检测工作,主要分为水上、水下检测两部分。其中,水上结构包括中控室、交通桥、圆弧翼墙、护岸挡墙等部分,可以通过直观的检测手段如目视、摄像等,也可以用全站仪测量,取芯室内抗压试验等方法检测水闸现有状况。对于隐患情况的探查,如渗水、塌陷等情况,可以通过综合物探的方法(高密度电法、地质雷达法等)解决。
水闸工程水下结构指常水位时位于水面以下的结构,如水闸闸室、消力池、护坦、防冲槽等。主要问题有混凝土结构表面破损、裂缝,钢筋裸露锈蚀、止水分缝破损、渗水,底板混凝土冲刷或者闸室及航道内淤积等情况。长期以来,水利工程的水下探测工作主要凭借潜水员的水下作业技能、经验进行判断,较多依赖于水质清晰度及双手触觉,通过探摸辨识水下结构异常情况,并通过实时对话进行描述记录[1]。近年来,有较多的先进光学、声学探测设备投入到水下检测中来,如水下高清摄像机、水下激光成像、水下多波束测深系统、侧扫声呐等,但这些设备都存在一定的使用限制条件。
2 水下结构检测难点
(1)采用人工水下探摸时经常会遇到作业条件受限,如水流过急或水下能见度较低;作业时间受限,潜水作业不能满足长时间大面积检查工作任务;作业深度受限,适合人工探摸作业有一定潜水深度要求,如水库、大坝蓄水较深时人工难以完成任务;另外,潜水员对于水下结构的熟悉程度及专业知识储备有限,探摸会受主观因素影响,描述缺乏可靠性。
(2)采用光学、声学设备时,针对水下渗漏、锈蚀、裂缝、冲坑与淤积等问题,只能做到“定性不能定量,定点不能定面”。如水下摄像,虽然操作方便简单,但是检测结果依赖于相机成像效果,并且极大地受制于水质情况。如水下激光成像方法,因为激光在水中会发生散射能量损耗较大,所以成像范围较小,只能定点检查,不能大面积的检查。多波束的声信号传播到垂直面时,小部分原路反射被换能器接收,大部分会由于垂直面的不平整导致反射到底面,然后部分声信号经过二次反射,再被接收换能器捕捉,这样会在垂直面出现声信号空白区域,无法判断是否由于冲刷淘蚀等原因造成。侧扫声呐只能获得二维地貌声图,难以量化冲刷缺陷、淘蚀等尺寸[2]。
本次采用三维声呐技术,操作便捷,安装方便,可以通过处理软件实时显示水下结构的三维图像。
3 三维声呐系统介绍及其特点
三维声纳可进行水下全景声呐扫描成像检查,利用声呐穿透表面附着物,生成高分辨率的3D全景图像。基本工作原理是三维成像声呐系统向目标区域发射声信号,利用声成像方法对接收到的回波信号进行处理,获得一系列二维图像,直接采集到目标外形轮廓的水平(X)、垂直(Y)、高度(Z)三个方向上的数据,同时获得目标物材质等更多细节描述。一次成像过程可同时获得振幅图像和距离图像,通过自动计算将这两类声呐图像进行处理合成,最终形成目标体的三维影像[3](见图1)。

图1 三维声呐检测原理示意图
BV 5000 水下三维声呐系统是一款紧凑轻便的声呐系统,工作频率为1.35 MHz,扫描范围为1 m~30 m,可在低能见度或者零能见度水下环境中开展作业,利用高分辨率声波技术形成精细的水下三维图像点云数据,点云图精度最小可达1.2 cm(软件技术手册)。特别适用于复杂水下结构、三维场景的区域勘测和堤坝、管道等检查。
BV 5000 水下三维声呐系统仪器设备见图2,设备主要技术参数见表1。

图2 BV5000三维声呐系统
对BV 5000 水下三维声呐数据进行处理时,可以通过软件设定同一站位上采集到的所有点云数据自动合并,以增加三维点云数据的精度;对于相邻站位间的三维点云数据,则可通过两次检测数据间共有特征物点云数据进行匹配,从而实现不同站位间三维点云数据的合并。
利用专业点云数据后处理软件,不仅可以进行点云数据的清错点、删噪点等测站检测数据后处理工作,还可实现不同测站间检测成果数据的拼接融合;并对最终成果点云数据进行浏览、判读,精确量测异常情况的位置和发育情况。
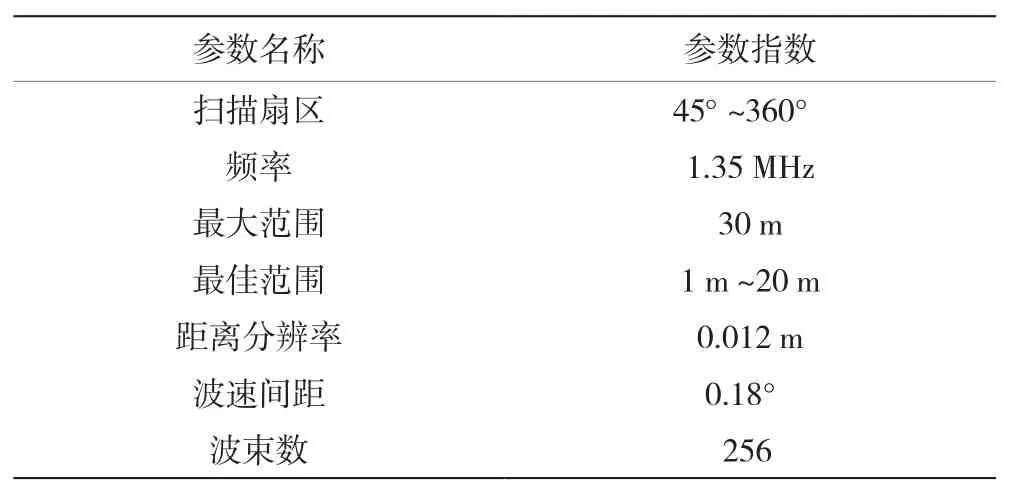
表1 BV5000主要技术指标
4 工程应用
本次鉴定的水闸为单孔闸,闸门孔口净宽4 m,工程为Ⅰ等工程,水闸主要建筑物为1 级建筑物,其它永久性建筑物为3 级建筑物,临时建筑物级别为4 级,其主要功能是防洪挡潮、引水、排涝等。
水闸工程范围顺水流方向长118 m,主要有内外河防冲槽、内外河海漫、内外河消力池和闸室等组成,闸室采用钢筋混凝土坞式结构,水闸引水流量40 m3/s,排涝流量35 m3/s,内外河消力池均采用钢筋混凝土U型结构,内外河海漫段、防冲槽段采用浆砌块石护面,两岸为斜坡,坡度为1∶2。
使用三维声呐系统作业可以采用两种方式,一种是固定测站式,一种是移动测站式,移动式需要水下机器人携带设备沿设定航线行进,通过机器人的定位信息将采集数据拼接,从而形成三维图像,但是移动测站式对于水下定位信息要求较高,且操作水下机器人较为复杂。本次检测采用固定测站式,共布设有效测站4 站(见图3)。作业时BV 5000 水下三维声呐系统由定制支架底座支撑,通过人工岸边吊放完成检测作业。BV 5000 三维声呐系统采用水底定点扫描检测作业,通过多站位检测数据组合拼接,最终实现对水闸工程水下结构的全覆盖检测。
经外业测站检测数据后处理和站间后处理数据拼接融合,获得水闸内侧声呐检测成果数据,并生成检测成果点云数据模型,见图4~图6。

图3 测站布置示意图
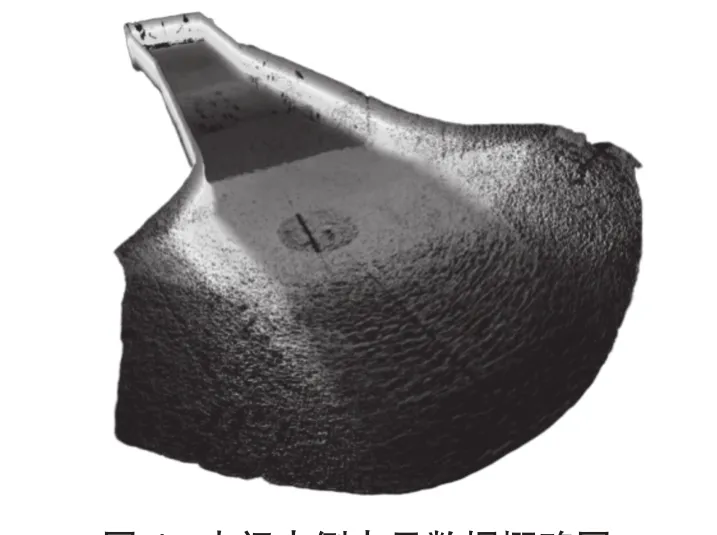
图4 水闸内侧点云数据概略图

图5 水闸内侧点云数据平视图

图6 水闸内侧点云数据俯视图
经点云数据模型浏览研判,水闸内侧水下声呐检测数据质量及站间检测数据拼接融合状态良好,最终检测成果点云模型完整、良好。水闸内侧各水下结构完整,闸室底板、导流明渠立墙未见明显破损,消力池结构完整,检修闸门门槽状态完好,闸室底部各处未见明显淤积,水下结构整体状态良好。对于细部结构如岸坡台阶、闸室两侧门槽及闸门结构等,均能清晰可见(见图7、图8)。
通过三维声呐技术检测到水下结构的情况,根据以上信息进行水闸稳定安全复核、翼墙结构安全复核、堤防整体稳定安全复核、消能防冲能力复核计算等,最终确定水闸评定等级,为水闸下一步运行维护提供依据。
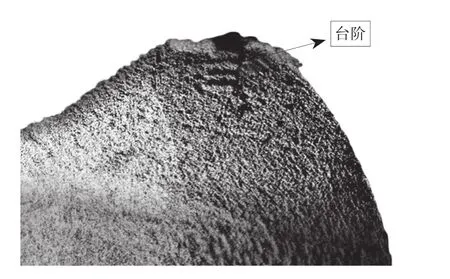
图7 水闸内侧河道岸坡台阶点云数据

图8 水闸内侧检修闸门门槽及闸门结构点云数据
5 结论与展望
(1)三维声呐系统固定测站式作业时,应提前了解现场情况,通过比较三维声呐系统最优扫描范围及目的检测范围,确定测站位置及点数,有利于数字成果优化。
(2)可以将三维声呐系统与多波束及侧扫声呐扫测相结合,既可以弥补多波束和侧扫声呐部分区域数据缺失的问题,又能实现浑浊水体下水下结构细部情况探查。
(3)三维声呐检测成果满足水工建筑物水下结构检测要求,可以进一步推广并建立统一的技术标准。
猜你喜欢
地理空间信息(2022年11期)2022-11-26 05:47:02
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
交通科技与管理(2022年9期)2022-05-24 23:28:07
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
测绘学报(2018年10期)2018-10-26 06:12:16
城市勘测(2018年1期)2018-03-15 03:37:02
水利科技与经济(2017年8期)2017-04-22 02:41:08
水利科技与经济(2016年6期)2016-04-22 05:07:36
声学技术(2014年1期)2014-06-21 06:56:32
