
车辆盲区监测系统分析及标准研究
2020-06-04 04:00:44李鑫慧唐风敏华一丁
汽车电器 2020年5期
郭 蓬,李鑫慧,唐风敏,华一丁,王 通,何 佳
(1.中国汽车技术研究中心有限公司,天津 300300;2.中汽研 (天津)汽车工程研究院有限公司,天津 300300)
1 概述
盲区监测 (Blind Spot Detection)是无人驾驶领域中十分重要的一部分。因为车辆的设计构造以及人眼视觉范围两方面原因,驾驶员在驾驶过程中会拥有一定的盲区范围,难以准确掌握全部周围环境。在汽车改变车道或者驾乘人员上下车时,如果盲区内有驾乘人员未察觉的车辆,极易引发交通事故,造成财产损失和人员伤亡。盲区监测技术利用传感器对驾乘人员的视野盲区进行探测,当盲区或接近区域内有车辆时,通过发出报警声音或者指示灯闪烁提醒驾乘人员,减少交通事故的发生。
盲区监测系统由3个部分组成,分别是信息采集模块、数据处理模块和结果输出模块。信息采集模块是利用安装在后视镜或后保险杠附近的传感器采集盲区和附近区域的信息并将采集到的数据发送给数据处理模块;数据处理模块运用算法处理采集到的信息,主要包括分析盲区内有无车辆行人和相关对象的信息、需不需要对本车驾乘人员进行报警两方面的处理结果,将结果发布给信息输出模块;信息输出模块可以将上述的处理结果通过显示屏进行输出或者必要时通过灯光、声音等对驾乘人员进行报警。
2 国内外关于盲区监测的研究现状
2.1 国外盲区监测研究现状
沃尔沃公司研发了盲点信息系统 (Blind Spot Information System),该系统通过两个仰装在左右后视镜上的摄像头来监测盲区,它的可监测范围达到10m长,3m宽。自2005年起,该系统已经在XC70、V70等多个车型上进行应用。
奥迪公司研发了侧向辅助系统 (Audi Side As-sist),该系统使用毫米波雷达,系统在车速高于60km/h被激活,监测范围是盲区及后方50m内。当在该范围内发现车辆后,该系统会向驾乘人员进行报警。
马自达公司研发了盲区监测系统 (Blind Spot Monitoring),该系统利用安装在车后保险杠内侧的雷达传感器对盲区和接近区域进行信息采集。当区域内有车辆时,通过车内指示灯对驾驶员进行报警。
2.2 国内盲区监测研究现状
目前国内对盲区监测的研究主要利用的是摄像头,通过对视觉信息进行处理,分析盲区及附近区域的环境。
贺咸阳等人利用单目摄像头,利用图像处理技术在每帧图像上提取盲区内车辆车牌并对车辆进行跟踪,再利用投影几何理论结合图片信息实现对后方车辆进行距离估算。吴婉颖等人利用Harris角点提取图像中的特征来检测车辆,并利用光流法进行两帧图像间的特征进行跟踪,在车辆跟踪方面提高了效率。
但是,视觉领域相关算法需要更高的计算性能,由于车载计算机的处理性能有限,会降低盲区监测系统的准确性和实时性。
3 盲区监测的技术原理
盲区监测主要是通过车上安装在前后保险杠及左右后视镜的传感器来进行环境信息采集,针对不同的传感器数据采用各自领域的算法进行处理,让系统把握准确的环境信息。系统通过对不同环境做出判断,来决定是否向驾乘人员报警。系统的关键部分在于能利用传感器数据对环境进行准确的分析,达到能够区分车辆的数量,以及每辆汽车相对于本车的一些距离信息和速度信息,达到环境的准确把控。
目前,车载传感器主要包括激光雷达、红外相机、摄像头和微波雷达等。这些传感器都具有各自的特点。在这些传感器中,激光雷达得到的数据精度较高,但价格相对更高,而且会受到天气的影响,在雾霾、大雨等情况下,探测指标会显著下降。红外线相机能够根据物体的红外特征,呈现出物体的轮廓,但是受温度影响很大,在恶劣天气下效果不佳。摄像头能得到的信息更多,但是受环境光照影响严重,而且一些视觉处理算法需要较高的算力来确保实时性。微波雷达的探测距离相比较远,且具备一定的测距、测速精度,不受天气影响,价格不高。所以,微波雷达在盲区监测系统中应用得更多。下面,本文将对FMCW体制、FSK体制的雷达系统的测距、测速原理进行介绍。
3.1 FMCW体制
FMCW (调频连续波)的雷达结构如图1所示,通过控制压控振荡器 (VCO)的输入电压 线性变化,使发射信号的频率是线性变化,与接收的回波信号经过混频器之后,能够得到中段频率信号,能够从该信号中解出目标的距离、速度信息。一般,FMCW的调制方法包括固定斜率三角波调制、变斜率三角波调制、快谐波序列调制,下面对快谐波序列调制的求解进行介绍。目标对象的相对距离。目标的运动速度需要通过nT时间内发射的所有锯齿波的回波信号共同计算。根据所有发射锯齿波的中频回波信号的快速傅里叶变换结果,在距离维度上再做一次n点的快速傅里叶变换,根据得到的二维结果求出多普勒频移fv,进而求出相对速度。

图1 FMCW体制的雷达结构示意图

图2 快谐波序列调制
式中:fc——发射信号的中心频率;B——调制带宽;T——一个锯齿波调制周期;C——电磁波在空气中的传播速度。
3.2 FSK体制
FSK(频移键控)体制的雷达能够在一个周期内发布多种不同频率的电磁波,经过混频之后得到中频信号,之后便可根据公式算出目标的距离、速度信息。常见的调制方式有2FSK、MFSK。本文主要介绍一下2FSK。
该调制方式发射两种不同频率的电磁波,利用两种回波的相位差求解,两种电磁波频率分为fA、fB,2FSK调制如图3所示。

图3 2FSK调制
快谐波序列调制是通过雷达发射N个大斜率短周期的锯齿波,周期为T,快谐波序列调制如图2所示。
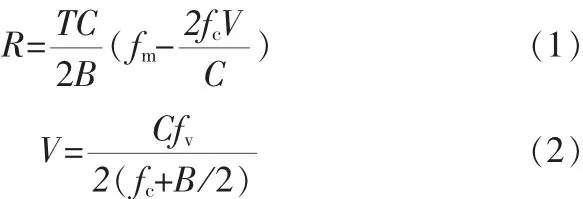
对每个调制锯齿波内的中频信号作m点的快速傅里叶变换,变换结果可以得到差频频率fm。根据该频率可以计算出
两种回波信号的频率之差为fstep。
多普勒频移ΔfA与ΔfB均包含速度信息,

对一个发射周期内的回波进行变频处理后,再进行谱分析,就可以得到回波信号的多普勒频移ΔfA对应的相位为φA=2πfAτ,ΔfB对应的相位为φB=2πfBτ,把τ=2R/C带入可知,

令φB-φ=Δφ,则可知,最大无模糊距离对应Δφ的取值范围为[0 2π],FSK体制的雷达可以如上所示,根据多普勒频移测量目标速度。
4 盲区监测系统测试标准
目前针对盲区监测的测试标准法规主要来源于ISO 17387,测试的工况比较单一,与实际交通环境相差较大。
ISO-17387-2008标准对盲区监测系统主要有4类测试工况,分别是直线超车 (其中包括超车和被超车两种场景)、目标车横向靠近、预警。该标准中将相对纵向距离较短、相对车速较小的被超车盲区预警称为盲点警告功能 (Blind Spot Warning,BSW);将相对纵向距离较大、相对车速较大的被超车盲区预警称为靠近车辆预警功能 (Closing Vehicle Warning,CVW)。
4.1 直线超车测试
待检测车辆与测试车辆处在相邻车道,待检测车辆与测试车辆用一定的相对速度分别完成两车相互超车的场景,如果测试车辆开始报警点、结束报警点均满足标准,则试验通过。
4.2 目标车横向靠近测试
待检测车辆处于测试车辆的后方,纵向方向位于测试车辆的盲区内,待检测车辆从与测试车辆相隔一个车道横向靠近测试车辆,在两车纵向中心线重合后待检测车辆远离检测车辆。如果测试车辆开始报警点、结束报警点均满足标准,则试验通过。
4.3 横向预警
待检测车辆在测试车辆左侧/右侧横向盲区外,待检测车辆与测试车辆以一定的相对速度分别两车相互超车的场景,若测试车辆全程未发生报警,则试验通过。
5 结语
当前,由于车辆盲区造成的交通事故占了很大比例,由此造成了大量死亡人数和财产损失,所以发展和研究车辆盲区监测系统就变得尤为重要。当前车辆盲区监测系统大多数只依靠单一的传感器进行环境感知,摄像头或雷达,由于传感器自身的限制,车辆盲区监测系统还存在着一些问题。随着传感器技术和相关处理算法的发展和进步,盲区监测系统会进一步提高实时性和准确性,能够对盲区内多个目标进行精确的掌握。
智能网联汽车是近年来汽车行业和互联网行业研究的热点,而车辆盲区监测是无人驾驶的一个重要组成部分,该系统如果能够对盲区附近环境进行精准实时的掌握,会极大提高车辆行驶的安全性。车辆盲区监测系统的发展,为以后无人驾驶汽车的普及打下了坚实的基础。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
趣味(数学)(2022年4期)2022-07-02 03:10:02
铁道通信信号(2018年12期)2019-01-31 05:36:42
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
铁道通信信号(2018年5期)2018-06-28 03:06:12
资源再生(2017年4期)2017-06-15 20:28:30
汽车维护与修理(2016年10期)2016-07-10 08:17:41
火控雷达技术(2016年3期)2016-02-06 02:30:26
中国卫生(2015年5期)2015-11-08 12:09:50
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
