
CODA声呐成像系统在防波堤扭王字块可视化安装中的应用
2020-06-03 06:31:58夏晓露聂洪斌刘竞辉
广东土木与建筑 2020年5期
夏晓露,聂洪斌,刘竞辉
(中交四航局第二工程有限公司 广州510230)
关键字:防波堤;扭王字块;声呐成像;可视化安装
0 引言
随着经济社会的发展,海岸线逐步被利用,迫使海港和人工岛屿的选址逐步迈向深水、海况复杂区域演变。作为海港和人工岛屿的外围结构,防波堤起到防御波浪,抵御泥沙侵袭的作用;抛石斜坡式防波堤主要由块石和人工块体等散体材料组成,因施工方便,便于维护,近年来得到了广泛的应用;扭王字块是我国学者在20世纪80年代学习消化国外的ACCROPODE 后进行了部分修改优化而来,经过30 多年的运用,已逐步成为了我国最流行的人工护面块体[1]。随着我国建筑施工企业不断走向国际化,扭王字块也逐渐应用到海外项目中,为适应国外的要求,扭王字块的施工标准也往往与国际接轨,对块体的安装质量要求更具体化。
目前,国内绝大部分工程项目在扭王字块安装工艺上仍选用的是盲装工艺,其主要方法是利用吊机配钢丝绳,根据GPS 或极坐标定点安装块体。块体安装完成后,在长时间的重力、波浪水流等外力的作用下块体间的姿态不断的重新调整、挤密,直至块体间钩联紧密,最终达到整体稳定[2]。盲装工艺存在安装精度低,块体初期咬合程度低,验收困难,工后返修几率高,基于此设计阶段往往通过加大块体尺寸和重量减少施工造成的风险,造成成本增加。本文以某港口城填海造地项目为依托,介绍人工块体CODA 声呐可视化安装工艺。
1 项目概况
某港口城填海造地项目,位于斯里兰卡首都科伦坡西海岸,填海面积为269 万m2,施工内容主要为水工结构、陆域回填及地基处理,其中水工结构包括外防波堤,内防波堤,潜堤,南、北拦沙堤,游艇码头内、外护岸,内河护岸,人工沙滩挡墙等(见图1)。
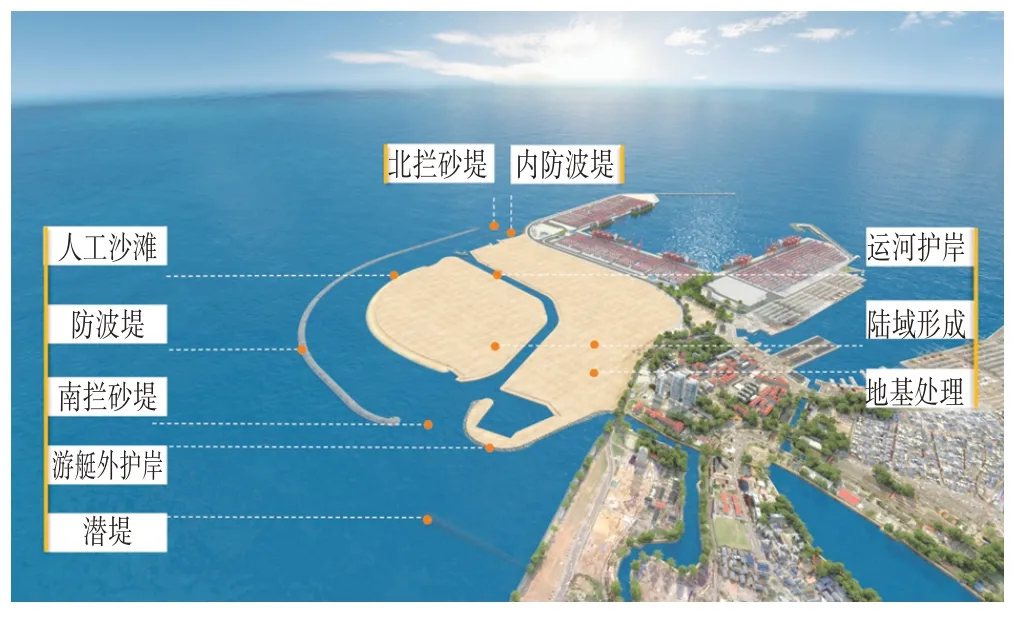
图1 项目总平面布置Fig.1 General Layout of the Project
外防波堤为主要防护结构,长度为3 245 m,堤顶高程为+4.0 m,采用斜坡式结构,护面块体采用单层扭王字块,坡度为3∶4,块体重量为17 t,块体数量达24 500 件,防波堤典型断面如图2所示。
设计说明书中对于扭王字块安装的规范要求如下:①扭王字块要定点随机安放,块体间需咬合良好,保证垫层块石不从扭王字块缝隙内被淘刷出去;②底部第一排扭王字块的安装质量需保证,安装偏差要求不超过1∕12 倍的扭王字块高度[3];③相邻扭王字块间安装后的姿态应不一致;④扭王字块需三点着地,不允许出现鼻部垂直斜坡面的安装情况;⑤斜坡上扭王字块安装密度为95%~105%之间;顶部水平段扭王字块安装密度不小于100%;
采用声呐可视化系统安装扭王字块的位置位于防波堤内外侧水下部位,其安装水深范围为-12~-1 m,安装坡度为1∶1.33。施工作业所在地海域海况差,有效作业时间短,水下安装深度大,堤顶通道宽度窄等不利因素给项目施工带来挑战。
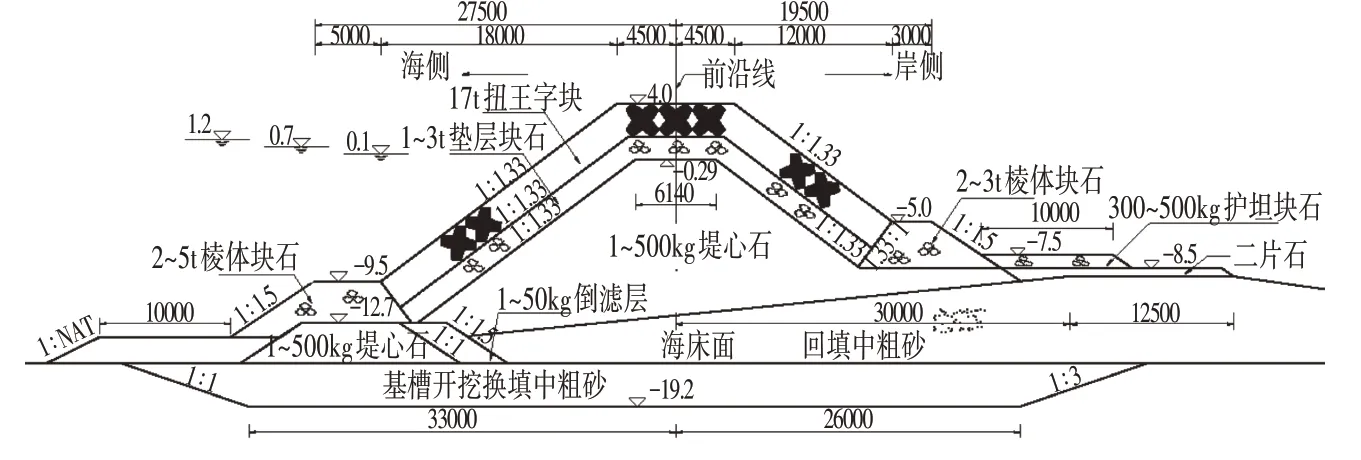
图2 防波堤标准断面Fig.2 Standard Section of Breakwater
2 CODA声呐可视化安装系统原理
声呐可视化安装系统有以挖掘机和吊机为载具的2个版本,两者各有优缺点,挖掘机版本优点是定位精准、同时可以搭载机械转盘或者机械手,便于调整块体的姿势,但是吊距相对较近,大型块体需要配备大型挖掘机;吊机版本主要优势是吊距较远,但定位精准度相对较差以及块体姿态调节相对较为困难(见图3)。

图3 吊机配备声呐可视化系统示意图Fig.3 Crane Equipped with Sonar Visualization System
挖掘机版本主要是通过给挖掘机配备Echoscope 3D 声呐可视化安装系统,在挖掘机臂的前段安装刚性支架,支架上布设水下摄像头和声呐装置,声呐扫测数据后通过数据线将数据传输至操作室的电脑实时显示块体水下图像,指导操作手安装扭王字块;刚性挖掘机臂消除传统吊机安装扭王字块因钢丝绳在水流、波浪力情况下摆动导致定位不精准的问题,系统的定位精度在5cm 以内;同时,配备的机械转盘,可以水平360°调整块体姿势,达到块体的理想勾连咬合效果(见图4)。

图4 挖掘机配备声呐可视化系统示意图Fig.4 Excavator Equipped with Sonar Visualization System
3 CODA声呐可视化安装系统组成
CODA声呐可视化安装系统包括Trimble-GNSS导航定位系统、Coda Echoscope 3D图像声呐、施工监测软件、3D时间锁定供电单元、水下智能开关等[4](见图5)。

图5 可视化安装系统构成Fig.5 Visual Installation System Composition
3.1 Trimble-GNSS导航定位系统
Trimble-GNSS 导航定位系统根据卫星接收器接收的GNSS 信号和机载电台接收的来自基准站的位置差分信号,使用载波相位动态实时差分法(RTK)解算出厘米级精度的定位坐标。同时系统通过传感器感知挖机机身、主臂、动臂、斗杆的转动角度,解算当前挖掘机的挖斗或扭王块吊装点的位置信息[5](见图6)并输出给CMS(Construction Monitoring System)施工监测软件,为扭王字块安装提供定位导航数据。
3.2 CODA-Echoscope 3D图像声呐

图6 导航定位系统示意图Fig.6 Schematic Diagram of the Navigation and Positioning System
Echoscope 图像声呐是1 台有着多种领先专利技术的高分辨率实时三维声呐(见图7),通过声学发射接收装置产生超过16 000 个声学信号(12次∕s的刷新频率)实时显示3D 图像[6]。声呐最大探测深度达120 m。当探测水下成像时,即使目标和Echoscope 图像声呐同时相对运动,仍然可以产生清晰和精准的3D 图像,并呈现出实时三维水下环境[7,8]。Echoscope图像声呐还具有图像拼接功能,能够将不同时间帧的图像合并成完整的3D 图像,利用更多帧合成3D 图像,即使在混浊的海水环境下也能实时成像。

图7 CODA图像声呐Fig.7 CODA Image Sonar
3.3 CMS施工监测软件
CMS 施工监测软件是可视化安装系统的控制中枢,接入Trimble-GNSS定位数据可导航安装扭王块到达设计位置,利用软件显示、设置和控制声呐图像,并根据声呐图像监控水下块体的位置和姿态,利用软件内置安装块体模型匹配、追踪声呐图像,通过模型模拟扭王字块实际安装位置和姿态,并显示已安装块体的实际姿态,实时监测扭王字块的安装过程[9](见图8)。
3.4 3D时间锁定供电单元
时间锁定供电源用作可视化安装系统与外系统的时间同步,使Echoscope 声呐精确的同步到一个外部时间源,并以1 ms的同步精度,实现声呐图像、定位信息及传感器数据实时同步,以满足位置和图像信息的准确度和实时性。
3.5 3D智能开关
由于声呐探头运行发热,需要在水下环境运行,长时间在空气中工作会损坏声呐设备,3D 智能开关可实现声呐探头在水中的自动打开、出水自动关闭的功能,保护声呐探头自动开闭和安全运行。

图8 可视化安装软件界面Fig.8 Visual Installation Software Interface
4 CODA可视化安装系统功能
4.1 安装过程可视化
可视化及3D 成像功能是CODA 可视化安装系统最主要功能之一,也是最核心功能。该系统通过图像声呐和Trimble-GNSS 导航定位(见图9)获取具有三维坐标和可量测的实时声呐图像,不仅能显示安装块体的位置和姿态,而且可以显示相邻已安装块体或待安装坡面的3D 图像,给操作人员提供一个可视的水下施工环境,便于控制安装质量[10]。

图9 扭王字块3D图像Fig.9 Chinese-pod 3D Image
4.2 安装块体模型与声呐图像识别追踪
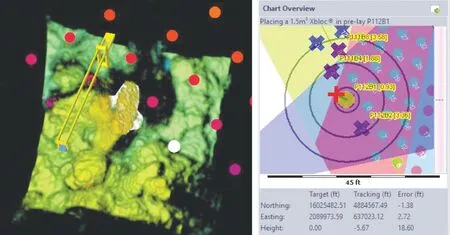
图10 安装模型与图像识别跟踪Fig.10 Installation Model and Image Recognition and Tracking
将安装扭王字块模型导入施工监测软件,通过调入模型可实现模型与声呐图像识别匹配,并自动追踪声呐图像到安装位置(见图10),当安装块体放置于设计位置并松脱后,块体模型将保存在安装系统中,利用模型来记录显示实际扭王字块的安装位置和姿态,实现安装过程和安装质量效果可视化,同时实现块体安装完成后没有声呐图像时也能显示块体的真实安装位置和姿态。
4.3 安装过程记录、回放功能
可视化安装系统可以记录安装块体的安装全过程,并提供块体安装过程回放功能,能随时检查每一个已安装扭王字块的安放过程,便于块体安装后质量检查,利于保存影像资料并用于竣工资料验收,实现扭王字块安装和验收一体化。
5 声呐可视化安装系统应用
⑴本项目17 t 扭王字块安装时距边最远距离为17.9 m,距顶最深距离12.0 m,选用CAT 6020B(200 t级)挖掘机站在堤顶进行水下块体可视化安装(见图11),挖掘机履带外边宽仅5.5 m,较适合堤顶较窄的情况。

图11 200t挖掘机安装扭王块Fig.11 Chinese-pod Installation by 200t Excavator
⑵扭王字块安装自下而上进行,在开始安装前,根据防波堤断面及扭王字块的尺寸完成安装点位图及坐标的编制。扭王字块安装时,先在平面安装成一个起始三角形后再按照菱形依次向前安装。安装时应尽量向同一个方向安装,无法避免相向安装时应重点关注对接处最后几个扭王字块的安装,调整扭王字块的间距至合适位置,避免出现过大的缝隙。
⑶扭王字块安装前先采用模型和陆上典型施工对操作手和潜水员进行安装法则的培训。
⑷扭王字块可视化安装方法操作要点:
①每次采用声呐系统安装扭王字块前,测量人员需在陆上核对声呐系统的定位准确无误。现场技术人员将待安装区域扭王字块的坐标文件导入操作系统中。扭王字块通过水上或陆上运输至安装地点后,在起重工指挥下完成钢丝绳的绑扣及起吊下水。操作手在扭王字块下水后,再次核对声呐设备、操作系统及安装点位的准确性,核实无误后,根据系统指示缓慢移动扭王字块至指定安装位置(见图12)。
②操作手通过声呐系统显示的周边已完成的扭王字块的位置及姿态来确定待安装扭王字块的位置及姿态,过程中通过移动、旋转机械臂(见图13)来实现扭王字块的移动及旋转。最后,操作手通过声呐系统各个角度的成像画面确定扭王字块安装稳定并与相邻扭王字块间相互勾连、姿态各异后,在系统中利用模型记录和保存扭王字块的安装位置及姿态,以便随时能检查每一个已安装扭王字块的安放过程以及安装后质量检查,并可用于竣工资料验收(见图14)。

图12 操作室画面Fig.12 Operation Room Screen

图13 机械旋转臂Fig.13 Mechanical Rotating Arm

图14 扭王字块安装效果图Fig.14 Installation Effect Diagram of the Chinese-pod
根据本项目采用规范和技术规格书要求,扭王字块安装需同时满足位置、方向、姿态、钩连和密度等要求。如按照国内传统的极坐标定位方法或者二维GPS 定位方法,需要潜水员辅助参与整个安装过程,并提供水下拍照,每块扭王字块安装后还需监理潜水员下水检查,并且夜间不能进行块体安装施工,无法满足工程质量和进度的要求。引进目前世界上最先进的声呐可视化安装系统应用于本项目,同时为了对比可视化安装系统的优势,部分安装区域采用常规潜水员配合吊机的方法安装,经对比可视化安装工艺优势明显,二者安装工艺对比如表1所示。
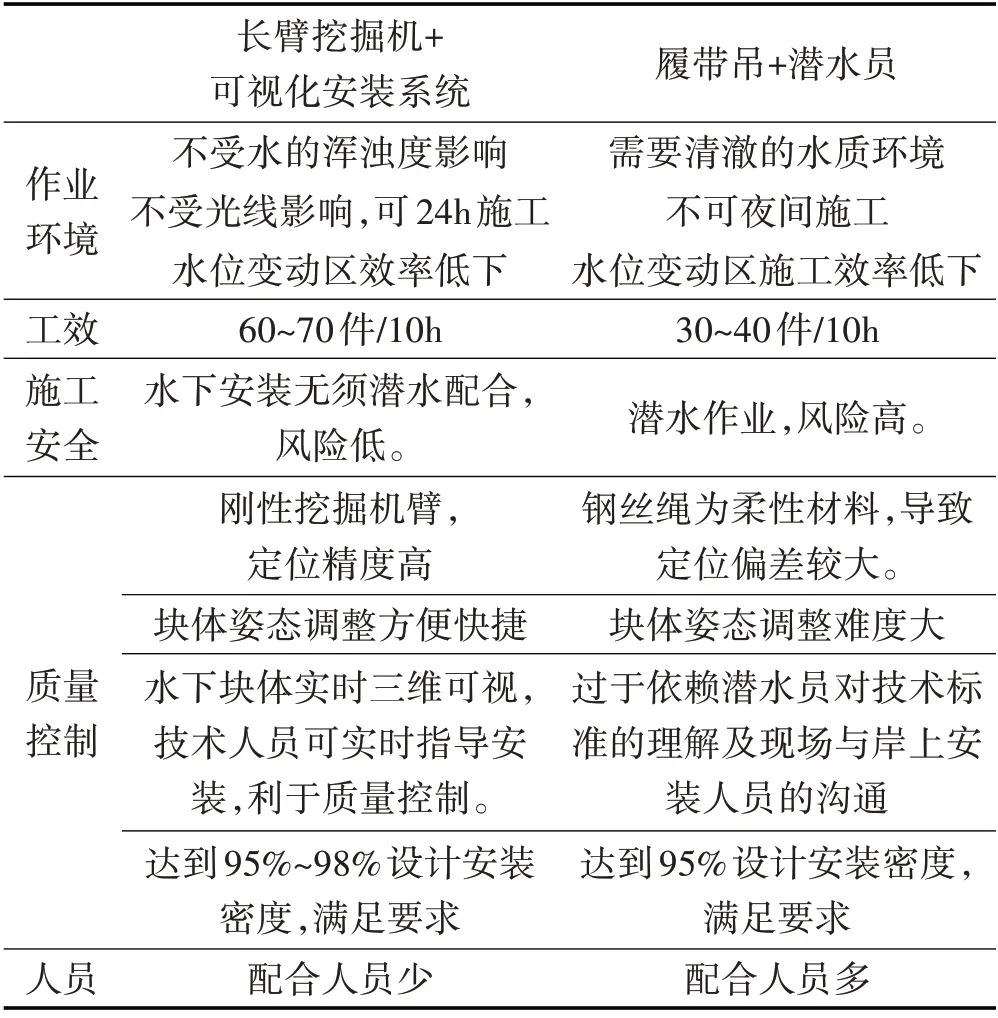
表1 可视化安装与潜水配合安装对比Tab.1 Comparison between Visual Installation and Diving Installation
6 结论
CODA声呐系统的运用实现了扭王字块水下安装的可视化,大幅提高了块体间初始勾连咬合程度,减少了工后返修的几率,提高了防波堤的整体安全稳定性;采用声呐可视化安装系统可实现24 h 不间断作业,增加了工作时间,提高了安装效率;同时全过程无须潜水员配合检查,改善了作业环境,减少人工成本的同时降低了安全隐患。面对越来越多大型、重点水工项目的需求,可视化施工在质量、安全、进度等方面的应用效益可观、前景广阔。希望通过对CODA 声呐可视化安装系统的介绍,为以后类似工程施工积累宝贵经验,对进一步研究可视化、信息化、智能化施工提供解决问题的思路。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
水运工程(2020年11期)2020-11-27 06:36:58
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
海洋通报(2020年6期)2020-03-19 02:10:34
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
建材发展导向(2019年10期)2019-08-24 06:24:52
中国港湾建设(2017年11期)2017-12-19 12:27:11
上海金属(2015年3期)2015-11-29 01:09:58
中国科技信息(2015年21期)2015-11-07 08:41:50
水道港口(2015年1期)2015-02-06 01:25:35
