
快速矢量选择的模型预测控制
2020-06-01 18:40黄冲穆亚星吕晟岩
科学大众 2020年3期
黄冲 穆亚星 吕晟岩
摘 要:近年来,有限状态模型预测控制由于其原理较易理解、容易处理系统非线性约束等优点被电力领域广泛运用,传统方法需要遍历所有的基本电压矢量来预测系统在下一时刻对应的状态,计算量较大,不利于实际应用。因此,文章介绍了一种优化算法的简单步骤,以降低计算量,提高实际利用率。
关键词:快速矢量选择;预测控制;有限状态模型
永磁电机是最近几年非常火热的一个研究领域,由于其较高的能源转换效率和功率大等优势,在许多领域应用十分广泛。以往的同步电机主要是通过矢量和直接转矩进行控制。近几年,有限状态模型预测控制越来越多地在电机控制领域得以应用,主要是由于其原理较易理解、容易处理系统非线性约束的特点,成为当今调速系统广泛研究并使用的一种控制技术。
为了降低电流预测计算量并减少开关频率,在常见做法的基础上,提出快速矢量选择的模型预测控制方法,改进算法以定子电流为控制变量,无须权重系数设计。另外,通过深入分析电压矢量和目标函数之间的关系,改进算法,通过数学手段验证算法的正确性。
1 有限状态模型预测控制优点
与同磁场定向控制相比,有限状态模型预测控制(Finite Control Set ModelPredictive Control,FCS-MPC)更容易减少众多的非线性约束条件,径直发生逆变器的驱动信号。此外,FCS-MPC不需要进行坐标更换、无须电流内圈整定,其具有简易结构、相应快速等优点。与直接转矩控制相比,模型预测控制(Model Predictive Control,MPC)可通过online优化选取最优电压矢量,因此会更加精准。此外,MPC能够抑制众多的控制目标,因此具有更为良好的稳定性能。
根据控制目标的差异,MPC可分为转矩和电流预测两种控制方式。因为转矩的不同,在构筑目标函数的时候需要考虑最为合适的权重参量,用于保证系统能否在不同的运行位置都有比较优良的静态性能。目前权重参数的确定是一个理论方面需要攻克的难题,所以通过大量的仿真模拟来确定权重参数存在可预见的误差。由于传统的MPC需要检视所有的电压标量来预测未来的状态,所以其运算量大,导致使用受限。MPC在基本电压矢量之中寻找最优选择,因此在全局最优电压矢量的选择上会有一定局限性,容易影响系统的性能。基于这些情况,本文介绍了一种新的预测控制算法,该算法的优点是可以不要进行权重系数的设置,极大地减少了算法的计算量,提高系统效率。
2 改进模型介绍
2.1 技术路线分析
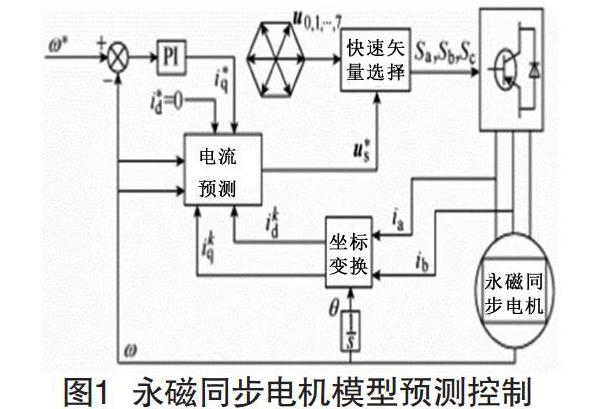
改进后的永磁同步电机模型预测控制如图1所示,将两电平模型进行分析。
(1)将与转速相关的项统称为反电动势,并将各时刻进行离散化,求出其中的平均反电动势。(2)在同步旋转坐标系下,反电动势项是直流量,将3个时刻的值相加求平均值可以滤除噪声,获得更为平滑的反电动势信号。(3)将得到的反电动势信号进行离散化以预测不同电压矢量作用下的电流变化情况。(4)计算得到的电压可按照传统方式带入目标函数,然后选取目标函数最小的电压矢量做出最有输出。在此比较下一次便可确定最优电压矢量。
2.2 仿真实验的验证
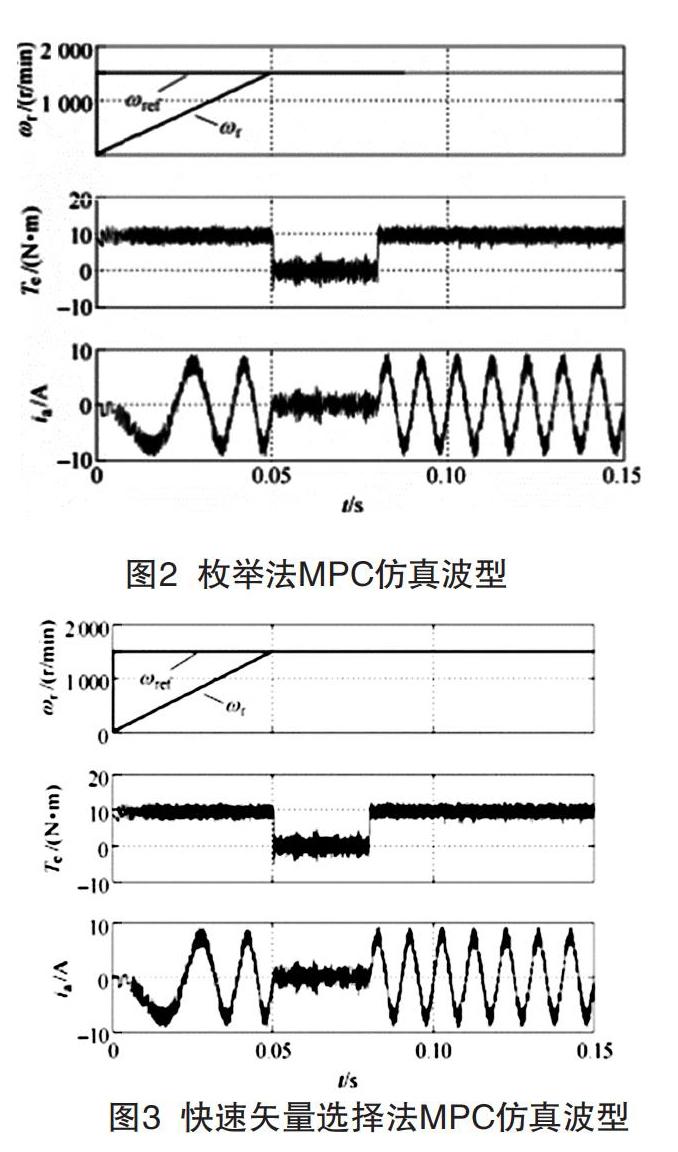
为验证基于快速矢量选择MPC的有效性,在Matlab环境中对传统算法以及改进算法进行了仿真。控制系统的采样频率为20 kHz,如图2所示,上下波形分别为机械转速和电磁转矩。仿真时,电机从零速以大转矩加速到额定速度。在0.08 s突加额定负载后,转速未出现明显降落,表明系统具有良好的抗干扰能力,如图3所示。
两种方法选择出的电压矢量完全一致,表明了两种方法本质的一致性,并且验证了快速矢量选择MPC法,确实能以更简便的方法选择最优电压矢量,因而具有更高的实用性。
3 结语
仿真模型预测的原理比较简单,并且有着优良的处理非线性约束的能力,其因优良的性能在模型控制领域得到了比较广泛的认可和应用。但是傳统的MPC因其计算量和对约束条件有较高的要求,所以导致深度应用受到了一定限制。本文以定子电流的dq轴分量为控制变量,无须设计权重系数,同时通过深入分析电流矢量跟踪误差和电压矢量误差之间的关系,在传统有限状态模型预测控制的基础上提出一种改进的矢量选择方法。其只需一次在线预测,即可快速选择出最优电压矢量,大大降低了传统算法的复杂度和计算量。仿真和实验结果表明本文所提出的控制算法在较宽的速度范围内具有良好的动、静态性能。
该方法解决了传统有限状态模型预测控制计算量大、不利于实际应用的缺点,降低了计算量并减少了开关频率,保证在任何时刻都能选择出全局最优的电压矢量,在非线性系统约束条件下也同样适用。
[参考文献]
[1]刘云飞.异步电机有限集模型预测控制算法及转矩脉动抑制研究[D].合肥:合肥工业大学,2019.
[2]高素雨.永磁同步电机模型预测控制与无速度传感器控制研究[D].北京:北方工业大学,2016.
