现代测绘技术在矿区整治测量中的应用
2020-06-01 07:18:14任宇征
江苏科技信息 2020年10期
韩 磊,任宇征
(江苏省地质勘查技术院,江苏南京210049)
0 引言
某地部分矿区和堆石场需要进行整治测量服务,以有效控制生态环境,维护城市山水自然环境的平衡,并为后续整治规划提供详细的测绘基础资料。整治测量范围共涉及50多个宕口和堆场,面积约5 km2,地处丘陵地带,交通不便。由于工期紧张、测量精度要求高,为提高工作效率,项目投入了航空摄影测量平台、无人船探测平台、三维扫描平台,并配备三维自动建模系统软件、三维测图系统软件和GIS计算分析软件等[1-2]。
1 技术流程
在控制测量工作完成后,采用无人机倾斜摄影测量技术配合三维激光扫描技术采集空间数据,采用无人船测深技术采集宕口积水区域数据[3]。利用三维建模系统平台之实景建模技术进行数据生产,分析处理倾斜摄影数据,融合三维激光扫描、无人船测深数据生成三维模型,并建立DEM模型。利用三维测图软件系统采集制作1∶500数字地形图,利用GIS软件进行土石方量分析计算[4-5]。
2 控制测量
为满足整治测量服务项目控制需要,在项目开展前对整个测区进行了踏勘,利用测区内及周边6个保存完好的D级GNSS控制点计算坐标转换七参数,并进行了点位精度校核。图根控制测量使用所求的坐标转换七参数,采用网络RTK差分模式进行点位测设。
3 无人机倾斜摄影测量
3.1 像控点布设及测量
3.1.1 像控点布设
矿区范围内没有足够的明显特征点,像控点全部在倾斜摄影前现场布设。确保所布点位有效控制成图范围,摄区接边处无漏洞,充分满足像控条件。为了GNSS作业时便于安置接收机和操作,点位布设在易于到达、视野开阔,远离大功率无线电发射源和高压输电线等区域。像控点制作用石灰在地面喷画“L”型直角标志并统一编号,大小在1 m左右,点位平均间距为200~300 m。小型堆场周围布设3~4个像控点。
3.1.2 像控点测量
像控点联测采用网络RTK差分模式,在测量前后均要对已知点进行校核,测量中流动站的测量范围在校正点控制范围内。像控点单测回测量成果采用平滑量测10个历元后平差结果,每个点位观测是2个测回,取中数作为最后成果。
3.2 倾斜摄影准备
为保证测图及模型的精度,影像地面分辨率应小于0.05 m。
3.2.1 前期准备
勘查测区,对倾斜摄影航飞进行分区和航线设计。确定测量范围线,在谷歌地球软件平台上进行测区范围设定,生成KML文件。依据航测范围在无人机飞控软件中设定飞行航线,航向及旁向重叠度均为80%。相对航高分别为:固定翼200~210 m,多旋翼110~120 m。
3.2.2 航测执行
摄影时间根据地形条件、气象条件和本地特点选择在上午10:00至下午4:00间进行。像片倾角不大于5°,最大不超过12°,超过8°的片数不多于总数的10%,确保没有航摄漏洞。像片旋角一般不大于15°,最大不超过30°,超过15°旋角的像片数不多于分区像片总数的10%。
根据项目要求和宕口、堆场的面积大小及分布情况,选用相应的机型进行航测。面积较小、分散的堆场及宕口选用多旋翼无人机搭载五镜头倾斜摄影相机进行航测工作;面积较大、相对较集中的堆场及宕口选用垂直起降固定翼无人机搭载五镜头倾斜摄影相机进行航测工作,确保影像清晰、反差适中、有较丰富的层次、能辨别与摄影比例尺相适应的细小地物影像,满足外业全要素精确调绘和室内判读的要求。
3.3 无人机倾斜摄影
通过无人机搭载多相机,同时从垂直、倾斜等不同角度采集影像,获取地面物体完整准确的信息[6-7]。垂直地面角度拍摄一组影像,倾斜地面角度拍摄4组影像。如图1—2所示。
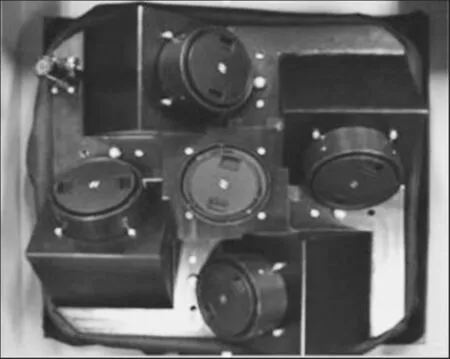
图1 倾斜摄影相机
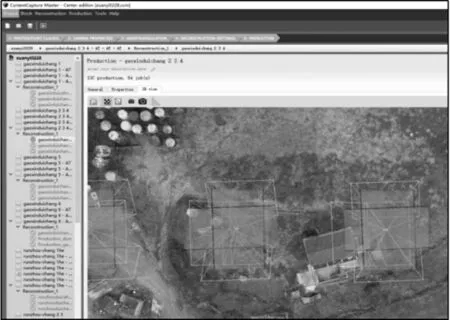
图2 倾斜摄影工作示意
4 三维激光扫描与水下地形测量
现状模型制作利用倾斜摄影测量数据,针对模型中的异常区域以及水下高程缺失的情况,采取了三维激光扫描和无人船作为补充数据采集。
4.1 三维激光扫描
测区中部分宕口有树木、突出地貌遮挡,为防止倾斜摄影测量方法存在高程异常现象,采用了三维激光扫描技术进行现场扫描,对倾斜摄影数据进行补充。生产出的数据与倾斜摄影数据充分融合,达到点云数据全覆盖。在野外三维激光扫描点云数据采集工作后,进行点云数据处理,拼接构建成为完整的点云模型,如图3所示。

图3 三维激光扫描点云模型
4.2 无人船水下地形测量
对于部分宕口有积水的情况,用无人船进行水下高程测量,即网络RTK与测深仪同步实施的作业方法,在测定点位位置的三维空间坐标的同时通过测量水深来测定水底高程。
由于宕口中的水塘面积普遍不大且水深值不一致,不适宜按照预定设计航线施测,所以本次测量通过手动遥控施测。人为调控无人船航行,每隔1 m自动记录一次数据,在观测中发现水深突变时进行了人工调控和加密记录数据,保证所测水下地形的真实性。野外工作情况如图4所示。

图4 无人船水下地形测量
5 三维模型构建
利用三维自动建模系统软件进行建模,以一组对静态建模主体从不同的角度拍摄的数码照片作为输入数据源,加入倾斜摄影数据,通过软件自动计算匹配。输出三维格网模型准确,精细地复原出建模主体的真实色泽、几何形态及细节构成,如图5所示。

图5 自动建模系统软件界面
根据摄影数据与像控点成果资料,将获取到符合建模要求重叠度的航空影像进行预处理,导入软件系统,均匀挑选出一定数量的野外控制点,通过软件自动匹配运算,进行三维模型生产。影像提取的中间数据点云效果如图6所示,点云构建TIN模型如图7所示,经纹理映射构建真实三维模型如图8所示。
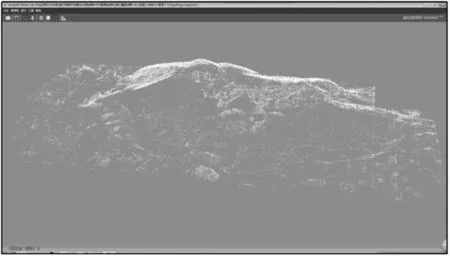
图6 影像提取点云效果
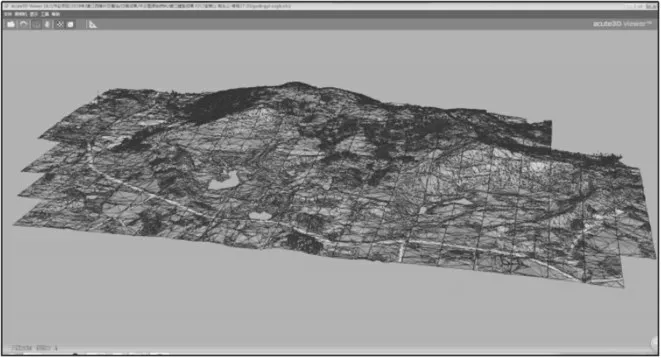
图7 点云构建TIN模型效果
根据倾斜摄影测量数据模型,叠加融合三维激光扫描数据模型和无人船测量数据,构建最终模型。
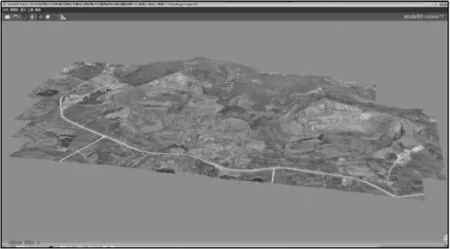
图8 纹理映射三维模型效果
6 地形图测制
利用三维测图系统平台,根据倾斜摄影生成的实景三维模型及倾斜相片等源数据按照1∶500全要素地形图要求进行立体测图。软件平台测图界面如图9所示。
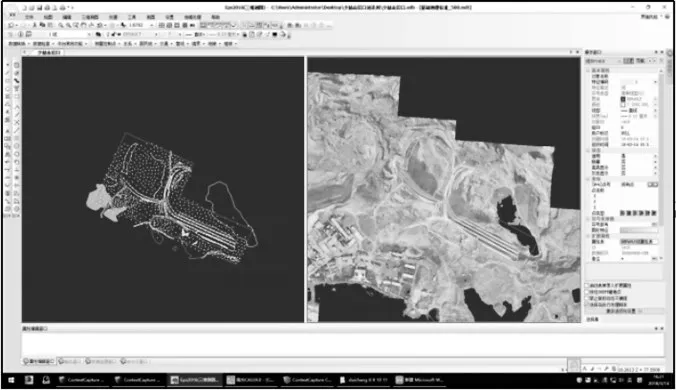
图9 三维测图平台界面
内业DLG线划图测图完成后,回放成调绘底图,供外业调绘与修补测工作。外业调绘时注意地物结构的合理性和完整性,并做到了及时进行自查互校。内业测图看不清、看不准、遗漏的地物均由外业补测,并专门安排外业人员采用全站仪实测高程点用于对成图高程进行校核检查。地形图内业编辑按照外业测绘的内容,用人工干预的方式逐个对原采集初编的矢量数据图上表示的内容做编辑修改,以统一的线型库、符号库、字库和要素代码分层标准进行编辑整饰[8-9]。
7 土石方量计算
利用整治规划要求成果数据制作三维模型,在GIS软件平台中和现状模型进行叠加,通过3D分析工具中的栅格数据表面分析功能计算填挖方量,生成结果如图10所示。深色区域和浅色区域分别表示填方部分和挖方部分,字段SUM_result标识填挖的土方数量,小于0表示挖方量,大于0表示填方量,单位是立方米。
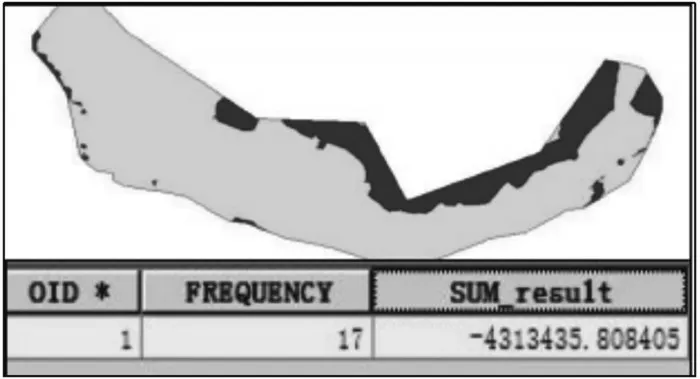
图10 土石方量计算成果
8 结语
在精度控制方面,笔者对作业流程的各个环节做好过程控制,严格执行ISO 9001:2008质量管理体系标准和“两检一验”制度,确保成果质量。土石方量计算是重点工作,本项目的高程数据丰富、分布均匀,经数据间叠加比对,精度满足要求,为类似项目工作积累了经验。
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
当代陕西(2020年23期)2021-01-07 09:24:44
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
中国房地产业(2016年2期)2016-03-01 01:25:35