
无线定位逆向寻车系统设计
2020-05-25 02:46毕波万洪均甘鑫刘超李攀温欣鹏
中国新通信 2020年1期
毕波 万洪均 甘鑫 刘超 李攀 温欣鹏
摘要:在当下,大型商场的地下车库都是非常大、地理位置结构复杂、车库内网络信号不好,停车难、找车难现象非常突出,如何解决对车库已停车辆进行定位,方便客户取车,这是一个急需解决的问题。如何利用现有资源,综合提升管理停车场,利用GPS定位技术、RFID技术,实现智慧停车场反向寻车,为车主提供寻车诱导,实现地下停车场智慧管理,缩短寻车时间,提高车库车位使用效率,更好地服务于人民群众的生活。
关键词:GPS;RFID;逆向寻车;最优路线算法
引言
在我国人口基数大、车辆基数大的大环境下,城市停车场是城市交通的核心,也是城市整体的重中之重,实现智慧停车场的反向引导系统是当下发展经济提升城市竞争力的首要任务。构建一体化智慧停车场反向寻车系统可以加快经济链条的驱动,解决我国大中城市经济发展的瓶颈问题[1]。
现在的大型停车场空间庞大,有的还是多层,对于人来说,整个停车场是错综复杂的。在这种情况下,车主会容易忘记自己停车的位置,为了找到自己的爱车可能会花费很多不必要的时间。封闭的停车场环境、内部微弱的信号都是逆向寻车系统的障碍[2]。刘译泽等[3]提出了智能车库的概念,通过停车场内的指示灯引导车辆进入车位,确定停车位置,车主寻车时则依靠查询器这类终端来找到爱车;郭芝源等[4]使用二维码设计了停车场的逆向寻车系统,通过网络下载和上传停车位信息。
以上的设计方法已经比较成熟,但可以继续改进,如操作较多且对硬件设备要求高,比如寻车查询器,这样不仅使得停车场的管理成本加大也让车主体验不佳。本文讨论了一种新的逆向寻车系统,降低停车场管理方成本的同时也提高了车主的使用体验。
一、逆向寻车系统
室内无线逆向寻车系统主要由三部分组成,分别是:
(一)人与车最优路线算法,该算法的核心代码主要实现的功能是根据人与车的位置信息,寻找人与车两点之间最短的路徑,大量节省车主寻找到车的时间。
(二)停车位与车牌的绑定,该模块的主要功能是不管来车为何,只要停在某一个停车位上,那么将经过RFID技术读取该车辆车牌信息,进行绑定,这就代表了该车停在了该车位上,为最优路径算法提供了车的位置信息。
(三)GPS定位驾驶员的位置,该模块主要是为了实时定位车主的位置信息,为人与车最优路径算法提供人的位置信息,方便计算。
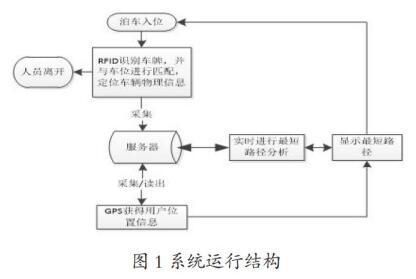
系统运行如图一,当需要寻车时,车主打开系统,系统根据GPS模块实时获取车主的位置信息,将此信息与车位信息作为最优路径算法的输入,算法得出路线后再输出,为车主进行导航。
二、逆向寻车各个部分实现
(一)基于蚁群算法的最优路径算法
2.1.1 人与车的最优路径算法采用蚁群算法有以下原因:
1)蚁群算法是根据模拟蚂蚁寻找食物的最短路径行为来设计的仿生算法。
2)蚁群算法已经十分成熟且优化完善能够适用于规划人与车之间的最短路径。
2.1.2 蚁群算法最短路径规划的具体步骤:
1:将停车场地图转化为二维矩阵形式变成栅格地图,初始化信息素矩阵 Tau,最大迭代次数K,蚂蚁个数M,表征信息素重要程度的参数 、表征启发式信息重要程度的参数 ,信息素蒸发系数 ,信息素增加强度系数Q及启发式信息矩阵
2:构建启发式信息矩阵。计算每个栅格至目标点的距离,启发式信息素取为至目标点距离的倒数,距离越短,启发式因子越大,障碍物处的启发式信息为0。建立矩阵D,用以存储每个栅格点至各自相邻无障碍栅格点的代价值。
3:对于每一只蚂蚁,初始化蚂蚁爬行的路径及路径长度,将禁忌列表全部初始化为1;蚂蚁从起始点出发开始搜索路径,找出当前栅格点的所有无障碍相邻栅格点,再根据禁忌列表筛选出当前可选择的栅格点。
4:如果起始点是目标点,且可选栅格点个数大于等于1,计算蚂蚁从当前栅格点转移到各相邻栅格点的概率,并根据轮盘赌的方法选择下一个栅格点。
5:更新蚂蚁爬行的路径、路径长度、矩阵D及禁忌列表。
6:重复步骤4和5直到起始点为目标点或可选栅格点小于1,本次迭代中当前蚂蚁寻路完毕,记录该蚂蚁的行走路线。
7:如果该蚂蚁最后一步是目标点,则计算路径长度并与当前已知的最短路径长度作比较,若本次路径长度小于当前已知的最短路径长度,则更新当前最短路径长度及最短路径;如果该蚂蚁最后一步不是目标的,则只将路径长度记为0。
8:重复步骤3至步骤7直到M只蚂蚁完成一轮路径搜索,更新信息素。
9:判断是否满足终止条件K,是结束蚁群算法寻优并绘制最优规划路径,否则转到步骤3。
(二) 停车位与车牌绑定
RFID射频识别是一种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别工作无须人工干预,可工作于各种恶劣环境。RFID技术可识别高速运动物体并可同时识别多个标签,操作快捷方便。
通过RFID识别技术,将RFID电子标签与车牌信息绑定,同时停车位上添加RFID读写器,实现停车位的车牌识别能力。当车驶入车位时,停车位内的RFID读写器将读出车牌信息,然后上传至系统保存车位信息。
(三) GPS定位车主位置
利用GPS技术定位车主位置,并将车主位置信息传给系统。
利用stm32单片机控制GPS模块来模拟手机GPS信号。STM32通过串口得到GPS模块的数据,然后再把数据传给系统。
三、软件设计
(一) 地图设计
根据停车场地图构建地图模型。构建的原则:
1)车位形状呈矩形;
2)停车场车位分布为垂直型,车道两侧各有一排,中间留有空地。
根据上述原则,我们利用矩阵构建平面地图,在矩阵中“1”代表障碍物,“0”代表可以通行。
(二)代码实现
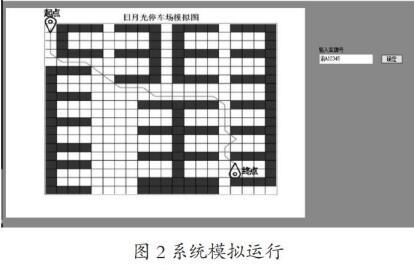
利用MATLAB、C#和单片机进行了系统运行模拟,效果如图2所示。
以下为部分系统软件代码。
MATLAB:
ROUTES{k,m}=Path;
if Path(end)==E
PL(k,m)=PLkm;
if PLkm mink=k;minl=m;minkl=PLkm; end else PL(k,m)=0; end end Delta_Tau=zeros(N,N); for m=1:M if PL(k,m) ROUT=ROUTES{k,m}; TS=length(ROUT)-1; PL_km=PL(k,m); for s=1:TS x=ROUT(s); y=ROUT(s+1); Delta_Tau(x,y)=Delta_Tau(x,y)+Q/PL_km; Delta_Tau(y,x)=Delta_Tau(y,x)+Q/PL_km; end end end 单片机: void parseGpsBuffer() { char *subString; char *subStringNext; char i = 0; if (Save_Data.isGetData) { Save_Data.isGetData = false; for (i = 0 ; i <= 6 ; i++) { if (i == 0) if ((subString = strstr(Save_Data.GPS_Buffer, ",")) == NULL) errorLog(1); else { subString++; if ((subStringNext = strstr(subString, ",")) != NULL) { char usefullBuffer[2]; subString = subStringNext; Save_Data.isParseData = true; if(usefullBuffer[0] == 'A') Save_Data.isUsefull = true; else if(usefullBuffer[0] == 'V') Save_Data.isUsefull = false; } } } 四、結语 本系统利用RFID识别车牌与绑定停车位,不用再通过微信扫码或其它终端来确定停车位置,极大的提高了用户的使用体验,方便简单。本系统通过电脑模拟运行,运行效果良好。 本设计还有可以继续改进的地方:系统直接作用于手机,不再使用单独的GPS模块,这样改进后可以增强本产品的实际使用价值,车主通过手机就可以查看爱车的位置信息与算法规划好的路线,符合当下的导航模式;最优路线算法尽管效果不错,但从效果上看依然有改进的地方,算法规划的路线不仅应该短还应该少走“冤枉”路。 参考文献: [1]何斌,蒋铃鸽. 一种基于传感网技术的智能停车场车位检测器方案设计与实现[J]. 科学技术与工程,2013,13( 23) : 6774-6780. [2]张宇. 基于“互联网+”模式的室内停车场系统设计与核心技术研究[D]. 杭州: 浙江大学,2016. [3]刘译泽,孙杰,谢昊.车辆引导及反向寻车系统设计探讨[J].现代建筑电气,2013,7( 11) : 66-69. [4]郭芝源,李臻,李维龙. 基于二维码的停车场反向寻车系统设计[J]. 物联网技术,2015,5( 10) : 42-43. [5]彭金栓,舒麟棹,刘银,孙鹏程,朱浩铭,刘珂. 基于蓝牙识别的反向寻车系统[A].重庆交通大学学报(自然科学版),2019,38( 3) : 111-115. [6]贾学婷,索琰琰,黄建昌.对反向寻车系统技术的探讨[J].数码世界,2018. [7]李华蓉 ,潘国兵 ,赵一 ,吴华玲.基于Android 平台的室内停车场智能寻车系统研究 [J].重庆交通大学学报(自然科学版),2016,35(04):112-115+126. [8]晏勇,雷航,梁潘.基于改进型蚁群算法自适应停车引导系统的设计[J].实验技术与管理,2020,37(03):80-82+138. [9]张丽珍,何龙,吴迪,杜战其.改进型蚁群算法在路径规划中的研究[J].制造业自动化,2020,42(02):55-59.
