
一种双电源供电的勘探机器人的设计实现
2020-05-19 08:40邱婉婷
卫星电视与宽带多媒体 2020年3期
邱婉婷


【摘要】机器人具有高精度,高可用性和在高风险环境中高效的优势。它在各个领域,如工业,农业,电子,物流,军工行业起着重要的作用,尤其是在行业风险高的产业。随着频繁使用机器人,需要灵活,智能和人机交互变得越来越迫切。因此,机器人释放了一定的生产力,减使得人力资源成本减少至一定程度,并且提高了工业生产过程中产品的质量。本文讨论了机器人技术的发展现状和应用领域,阐述了国内外机器人技术的研究现状,在美国,德国,日本和中国工业机器人的研究进行了总体的描述。本文还提出一种具有信息采集及地图构建、路径选择与规划、远程遥控样本抓取的勘探机器人。它可以解决现阶段行业存在的能源消耗问题,具有一定的社会意义。
【关键词】仿生机器人;双电源供电;履带底盘设计
随着机械自动化和通信技术的发展,机器人产业及其在工业生产和社会生活中的重要作用越来越大。作为一个复杂的技术,是集成电路,工业制造,传感器和编程等技术的有机合并。经过几十年的发展,机器人技术已经成为工业生产自动化的重要组成部分,广泛应用于各种工业生产领域。中国对机器人的探索相对较晚,但机器人相关技术的发展也在国家层面受到了重视。由于机器人具有精度高,在高风险地区高效和适用性强等优点,它们在各个领域,如工业,农业,电子,物流和军事等都发挥着重要的作用,特别是在劳动强度大的领域和高风险的行业。于是,本文重点关注机器人研究,设计了一种双电源供电的能源勘探机器人。机器人主要由仿生抓取手臂、低功耗信息传输模块、自追踪太阳能电池板、履带缓震底盘四大部分组成。仿生抓取手臂分为抓取执行机构和体感控制机构,通过采集人手运动信息,实现执行机构的同步工作,代替勘探人员工作,节约能源。低功率信息传输模块确保设备在恶劣的勘探环境中正常运行。太阳能电池板作为辅助能源采集装置,自追踪的设计实现了始终的最强光照,提高能源采集效率。履带式底盘具有强大的缓冲越野能力,适用于野外复杂的地形。
1. 功能介绍
1.1 仿生机械装置原理
为了实现高效样本采集,节约人工成本。设计了一种由机械操作手套和机械臂两部分组成的采样机构。主要实现了一种利用多传感器采集人体手掌动作信息,进而利用无线传输模块将动作信息传输至机械臂控制器,实现对于机械臂的远程遥控操作。机械手套通过传感器采集人体手掌动作,利用无线传输模块将信息传输至机械臂控制模块(STM32嵌入式系统)。嵌入式系统在接收信息后,根据指令输出定量占空比的PWM波,控制舵机旋转角度,从而实现使机械臂的各个关节转过与人手指转动相同的角度。通过加装超声波传感器,能使机械臂移动到需要抓取目标所处最佳位置完成工作。
1.2 抓取结构控制
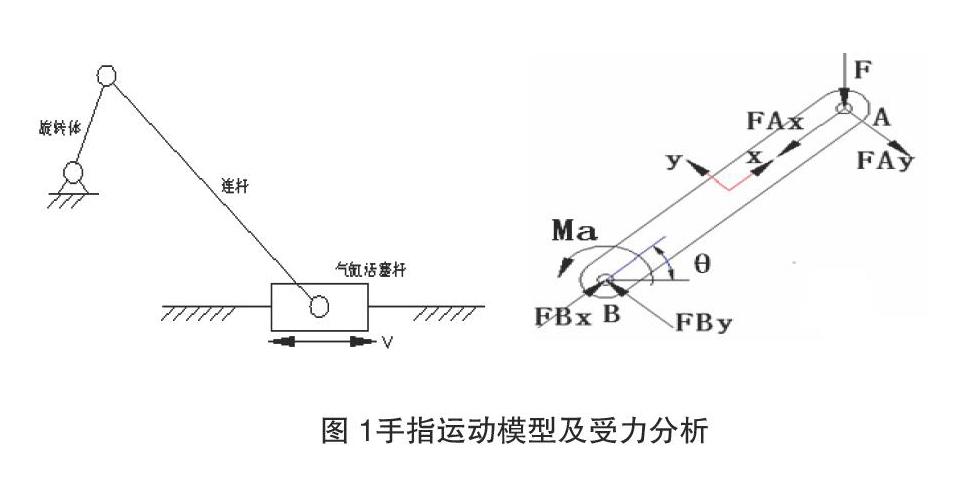
首先对手指运动方式进行运动学模型转换。分析得,在实际的抓取过程中,多依靠关节转动完成其运动动作。因此本系统采用了直线驱动机构选取最简单的滑块-曲柄机构进行模型建立。同时为探究整个机械手抓举力,通过对单个指关节进行受力分析。F表示外力大小,单位为N。表示指节转过的角度。L表示连杆的长度,单位为mm。(图1)
通过实际测量实验得,每根机械臂手指的提升力为10Kg左右,对自然状态(指节之间角度为45°)下每个手指进行受力分析得:F=10×10=100N;=45°;L=15。
由力平衡条件:,得:
(1)
由单个手指的力学性能分析可得到全手的力学性能。其中,作为采摘机器人性能的重要考察指标,其最大抓取力为:。
1.3 自追踪太阳能电池板
由于设备工作环境常在户外开阔场地,阳光充沛,为了高效进行太阳能采集,设计依靠光敏电阻进行光强度监测,进而控制云台旋转朝向光强最强角度,进行能量收集。
通过对该新型跟踪机构进行空间位姿分析及实验研究,实验结果显示:该机构跟踪太阳的方位角可以达到360°,俯仰角能达到110°,基本实现了对太阳的全方位的跟踪。该机构输出位姿数值解与实测值平均误差分别为1.8%、2.6%、0.84%,表明该机构跟踪太阳的精度较高。此外,该机构电机驱动能耗约为传统二轴跟踪机构的25%。
通过追日跟踪和固定安装的利用率对比发现(实验A电池板进行追日跟踪,实验B电池板固定倾斜安装,实验A、B在相同环境条件下特性相同的蓄电池进行充电):
由图2、3可知,在11:00~14:00时间段里,太阳能电池板追日自动跟踪的效率相比固定式提高不多,而在其他时刻电池板的发电效率平均提高28%~35%。
本装置所載太阳能电池板功率为12w(约0.1m^2),重量约为5斤左右,选用直流减速电机37GB520,额定功率10W;光敏传感器模块4个,工作电压3.3v,15mA。电机工作累计时间:设从早晨8时到下午6时,每30min调整一次,每次调整用时5s,则工作时间为100s,合计0.027h。则直流电机、光敏传感器日耗电量估算如下:
;
;
自动跟踪日增电量:
由上述计算可得,日耗电量仅为日增电量的6.25%,对节省能源方面有积极的意义。
1.4 运动底盘部分设计
机械设计包括三个部分,框架式车架、自制履带和步进电机驱动。框架式能有效的减轻机器人的总重量,同时还具有较强的抗扭能力,适用于恶劣的环境使用。使用有限元模型作为稳定性分析基础,通过进行模态分析确定所设计的产品或部件的振动特性。履带板底部开槽,以增加履带的地面附着能力。外链板带有凸耳与底板铆接在一起。
综合考虑电机功率、链轮转速及工作环境,确定采用小节距双排链进行传动,且节距。两条履带均采用步进电机进行驱动,通过改变两步进电机输出脉冲频率、占空比控制车体的运动。履带式机械的驱动力,式中,为发动机转矩N*m;为各档传动比;为机械效率;rdq为驱动轮动力半径;经计算后。行驶速度式中:为发动机转速;rdq为驱动轮动力半径;为驱动轮滑转率(履带式一般取0.07)。经计算后得到结果速度。理论速度,实际速度。
转向驱动力矩的分析与计算:机体质量平均分配在两条履带上,且单位履带长度上的负荷为,式中:G车身总质量kg; 履带接地长度。经计算得。 根据上述假设,转向时地面对履带支承段的反作用力 的分布为矩形分布。在履带支承面上任何一点到转动中心的距离为x,则微小单元长度为dx,分配在其上的车体重力为qdx,总转向阻力矩可按下式:
(2)
式中,为转向阻力系数。经计算得,转向驱动力矩满足使用要求。
2. 结论
从国际机器人联合会的统计数据可以发现,机器人产品的全球的销量在近几年逐渐地增多。中国到目前为止已成为世界上最大的机器人市场,并且机器人的需求量连续两年将继续增长。对此,浙江省率先提出要以机器人为核心,并计划推动的工业化生产方式的转变,从“制造”向“智能制造”在未来五年内的“机器替代”项目。然而,在中国的机器人数量还需要继续增加,因为中国每万名生产人员所持有的机器人的数目明显的低于世界平均水平的一半。在机器人领域的巨大的市场需求同时也带来了中国的工业机器人产业的发展机遇。随着劳动力和土地成本的上升和经济的快速发展崛起,机器人往往是越来越智能和人机一体化。
同时,本文提出勘探机器人针对石油地质等高危行业危险程度高、意外发生几率大的特质,利用自组网技术结合自主研发的低功耗无线通信模块,搭配始终能够追踪最强太阳光源进行能量收集的自追踪太阳能电池板,用于保证通信的不间断性,不仅实现多机器人协同工作,也可以在通信失效区域正常使用,保证机器人在恶劣环境下正常工作。
参考文献:
[1]徐方.工业机器人产业现状与发展[J].机器人技术与应用, 2007, 5(3): 1-3.
[2]王田苗,陶永.我国工业机器人技术现状与产业化发展战略木[J].机械工程学报,2014,50(9).
[3]孟明辉,周传德,陈礼彬,等.工业机器人的研发及应用综述[J].上海交通大学学报,2016,50(S1):98-101.
