
基于组合运动规律的凸轮廓线计算机辅助软件
2020-05-19 14:57孙天宇孙骏朱志建孙正日
科技风 2020年14期
关键词:凸轮
孙天宇 孙骏 朱志建 孙正日
摘 要:使凸轮软件实际应用化,以便于适应工业制造中的复杂要求。增加软件中所包含从动件运动规律的数据量、增加可设计的凸轮类型种类,实现推程和回程不同从动件运动规律的自由组合。利用VB软件设计类型选择界面和数据输入界面,并使可视化编程语言的过程更直观。进而使软件实现凸轮廓线的自动生成、数据分析、对错误示警、显示所需更正条件、输出推杆位移图和实际以及理论凸轮廓线等功能。
关键词:凸轮;解析法;VB;组合运动规律
Abstract:make the cam software practical application,increase the amount of data it contains and the types of cams that can be designed.Using VB to design type selection interface and data input interface,and make the process of visual programming language more intuitive.Furthermore,the software can realize the functions of automatic generation of cam profile,data analysis,error warning,display of required correction conditions,output of push rod displacement diagram and actual and theoretical cam profile.
Key words:Cam;Analytic method;VB;Combined Motion Law
一、緒论
凸轮机构结构简单而且紧凑,但是还具备了控制、传动、引导等各项功能,有其他形式从动件所没有的特点,应用十分广泛,所以对于凸轮机构的深入研究一项十分重要的工作。在凸轮机构的设计中,凸轮廓线的形状主要取决于从动件的输出运动规律,选择不同的运动规律会对机构的运动和动力特性产生较大的影好响,因此在如何设计和选择优良的运动规律是凸轮机构设计中需要解决的首要问题。[1-3]
传统的用作图方法来绘制凸轮轮廓曲线工作量很大,精确度不高,而且受人为因素影响较大。而且会严重影响精确度和实际应用效果以及量产速度。而解析法可以精确计算轮廓线上各点的坐标、误差小、速度快、可以进行精确设计。当下计算机辅助设计已广泛应用于解析法设计凸轮机构,但是大多数软件所含从动件运动规律种类较少。在凸轮机构的设计过程应根据工作要求确定从动件的运动规律,因此从动件规律单一严重影响了软件的实际应用。以此本文提出可以将不同种从动件运动规律在推程和回程自由组合、包含多种运动规律自由组合的适用于工业复杂情况的计算机辅助设计软件。[7-8]
二、从动件运动规律
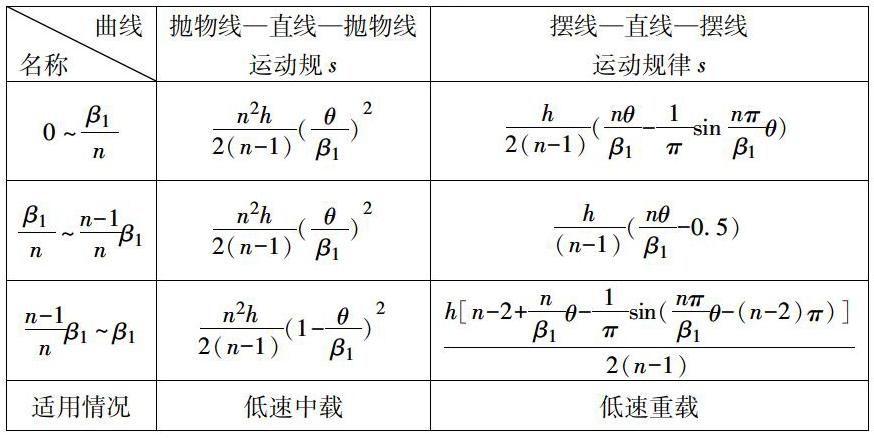
从动件的运动规律就是凸轮机构中推杆在空间或平面内的位置移动规律s、升程h、速度v、加速度a、跃度j、凸轮转角θ与时间t之间的关系式。同时与β1(推程运动角)、β2(回程运动角)、β'(休止角)等有关。
常见的从动机运动规律主要包括三角函数运动规律和多项式运动规律。比如等速运动规律(一次多项式运动规律)、等加速等减速运动规律、3-4-5次多项式运动规律、正弦加速运动规律、余弦加速运动规律等。但是单一运动规律大多会有一些问题比如冲击性等,会导致工业上无法量产。
比如等速运动曲线,从动件在运动开始时速度由零突变为v,因此理论上起点加速度a趋向于无穷大;同理运动终止时速度由无穷大变为零,理论加速也变为负无穷大。而由此产生的巨大惯性力一定会导致强烈冲击,而这种刚性冲击对凸轮和从动件会造成严重损害。而简谐运动会产生加速度的有限值突变,导致惯性力产生柔性冲击,在高速阶段也会产生不良影响,只适用于中低速。综上各种曲线都会有不同的优缺点和不同的适用环境,因此不能单独使用,需要进行各种修正和结合适用环境的组合。
不同的运动的规律有不同的优缺点,也适用于不同的场合,但是对于一些复杂的实际情况,比如工业生产中为了使凸轮机构有更好的性能,常将基本运动规律加以改进,或进行结合使用。比如为了进一步降低amax或满足一些特殊需求,现代工业中的高速凸轮的推杆常采用多项式位移曲线或者几种曲线的组合,比如将正弦加速和等速运动两种运动规律组合而成既能使从动件大部分行程保持匀速又能避免起始和终止阶段产生冲击。而这也是一些凸轮设计电子辅助设备所不具备的功能,既复杂组合运动规律的应用。
在组合时,所选运动的规律应在有关区间内连接,在拼接点两个运动规律的位移和速度对应相等(既位移曲线在拼接点相切);高速时还应当要求加速度在拼接点对应相等(既两段位移曲线在拼接点的曲率半径相等)。
对于组合运动的冲击性判断,首先应根据运动规律求一阶导数导,然后带入临界值,观察临界值的左右极限,若不相等则会因为加速度瞬时无穷大发生刚性冲击,若相等则继续求解二阶导数代入临界值,在此种情况下,二阶导不等则会因为跃度无穷大,而发生柔性冲击,只有一二阶倒数左右极限均连续,才是无冲击。所以在软件设计中我们加入了冲击性的判断信息框。
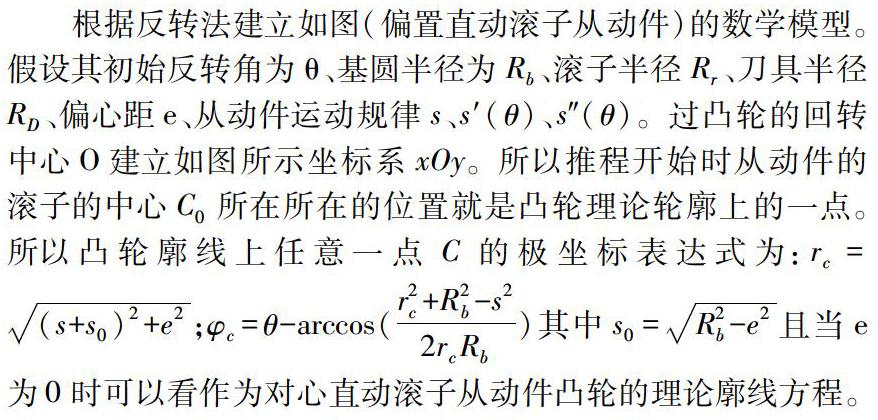
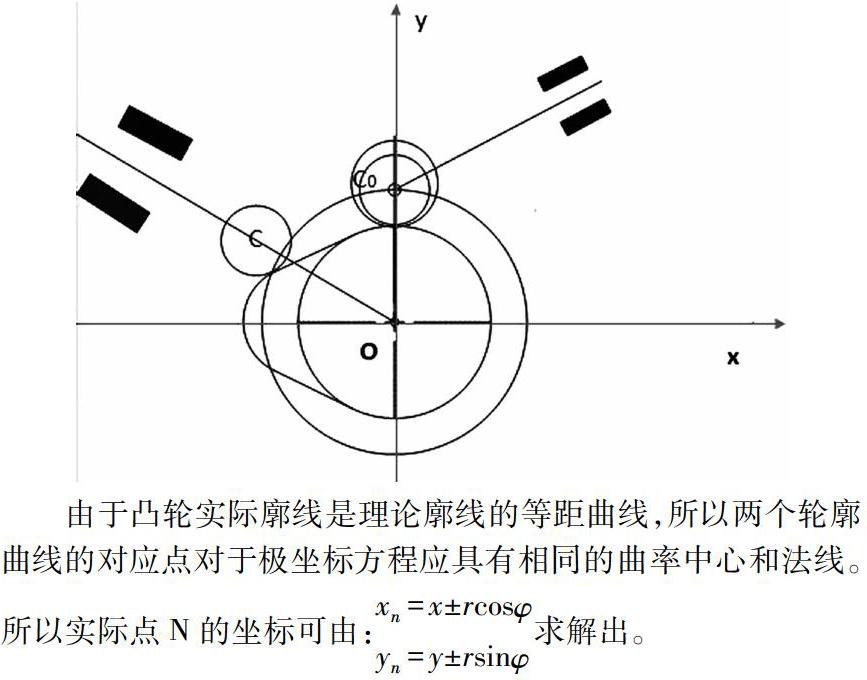
三、凸轮轮廓
四、凸轮机构的压力角
凸轮给从动件的力可以分为沿着从动件的有用分力F和垂直于从动件的有害分力f,有数学关系我们可以知道,当F增大时压力角α越大f也越大,机构的效率越低。当压力角增大到一定程度就会出现f>F既阻力大于动力的自锁情况。因此实际应用中需要可考虑凸轮廓线上任何点的压力角都应当小于一个固定的数值—许用压力角。为了方便软件进行自我检查,对于摆动从动件凸轮机构应使许用压力角[α]=45°、对于直动从动件凸轮机构[α]=30°。
凸轮尺寸的决定性数据主要是凸轮的基圆,在其他条件不变的情况下凸轮基圆越大,凸轮尺寸也会增加。因此为了减小凸轮尺寸使结构紧凑,应当使用小基圆,但是基圆减小会引起压力角增大,进而出现自锁等现象。因此本软件加入功能:满足最大压力角小于许用压力角的情况下基圆尽量减小。
五、设计流程及实际运行结果示例
六、结论
本软件利用Visual Basic可视化编程语言建立了凸轮轮廓设计的数据参数化输入界面,实现了其轮廓线的自动生成和对于工业上复杂凸轮的设计和检验,同时实现对与设计不合理问题的自动判断和示警;拥有整体设计速度更快、输入数据更少,包含凸轮数据种类更多,图像更直观等优点。应用人员只需选择凸轮运动类型和从动件唯一规律并输入已确定的相关参数数据。复杂的计算过程和绘图过程就可以由就可以由计算机来完成。而且本软件还设置有信息输出框和错误信息提醒框图,实现了出现问题及时显示及时解决的特色功能。
参考文献:
[1]杜韧,冯伟娜,刘昭,刘宏伟,毕珊珊.基于MATLAB语言的凸轮轮廓曲线的解析法设计[J].机械工程师,2018(07):1-4.
[2]宋晓华,吴明明.基于解析法的凸轮轮廓曲线计算机辅助设计[J].现代机械,2005(01):58-59.
[3]毕艳丽,张宏国.摆动滚子从动件盘形凸轮机构设计的解析法[J].佳木斯大学学报(自然科学版),2002(01):36-38.
[4]成大先.机械设计手册第五版单行本(机构).北京:化学工业出版社,机械电气分社,2010.
[5]杨可桢,程光蕴.机械设计基础.北京:高等教育出版社,2013.
[6]刘昌祺.自动机械凸轮机构使用设计手册.北京:科学出版社,2013.
[7]韩柳.凸轮机构计算机辅助设计系统研究[D].天津大学,2009.
[8]王知行,李瑰贤.按许用压力角确定直动从动件盘形凸轮最小尺寸的解析法[J].哈尔滨工业大学学报,1985(A6):20-27.
猜你喜欢
丝绸(2022年6期)2022-06-22
商情(2019年2期)2019-03-20
科技视界(2018年21期)2018-12-10
文艺生活·中旬刊(2017年4期)2017-05-25
建筑工程技术与设计(2015年26期)2015-10-21
中小企业管理与科技·中旬刊(2014年8期)2014-09-22
