
基于北斗系统的滴滴轨迹安全监测与预警系统
2020-05-19 14:57董云飞王晨晨赵金辉樊博威
科技风 2020年14期
关键词:人工智能
董云飞 王晨晨 赵金辉 樊博威

摘 要:“滴滴打车”俨然成为一种具有时代特色的交通方式,然而近年来,和以往的传统出租车相比,网约车主身份背景参差不齐、难以对其有系统的约束,导致安全问题频频发生。为了将其优势保持并更加安全,本文将设计一种运用北斗导航对行车轨迹进行实时检测,辅以面部识别、语音识别模块对司机进行实时监督,最终当乘客发生或面临危险时,远程操控锁死汽车,并自动报警传递位置信息,保障乘客生命安全。
关键词:人工智能;面部识别;北斗导航;后台锁定;安全与预警系统
1 绪论
安全问题是交通服务业的重中之重,但其却容易在互联网的隐蔽下滋生诟病。到目前为止,“滴滴”一直在如火如荼的发展,但其存在的安全隐患被高速的发展所掩盖。
有数据显示,在2016年的三月,滴滴出行使用量已超越Uber,日活跃用户也是四倍于Uber。然而从滴滴成立之初到目前为止,事故接二连三,2018年女学生遇害更是将滴滴出行推向了风口浪尖,顺风车业务一度面临下线的危机。
虽然各种各样的安全措施不断出台,可是已经停滞的顺风车却迟迟没有重新上线的趋势。对此,本文介绍的预警系统将从路径、人员识别、语音监测这几个方面对乘客进行实时保护。
目前语音技术已广泛运用于我们的生活当中,若用到車内预警中,也会产生奇效。
确认司机身份是保证乘客安全的根本条件,而以人体特征为识别的对象,准确度高,可以大大增加司机个人信息的可控性。
文中将论述采取航迹推算法与北斗导航组合汽车定位方案,使得即使在北斗导航卫星信号收到影响的时候,也可以通过航迹推算,借助车载里程传感器,提供一种高精度高、可靠性的定位模式。
2 功能概述
这套操作系统具备人员识别核查、位置锁定、航向监测、车内对话分析监督、远程锁车以及自动报警的功能。行车前的人员核查是最基础的保障,基于北斗信号增强后的定位和航迹推测可以实时检测到乘客所在的具体位置,当位置异常时,则可以通过后台锁车并自动报警。而车上携带的AI语音会对车内交流进行对话分析,从各个方面保护乘客的乘车安全。
3 创新方案
本团队设计了一款基于北斗导航的“滴滴打车”监测系统。通过地基信号增强以及航迹推测算法,对“滴滴车”进行精准定位,并结合面部识别、以及AI语音识别进行分析,估算乘客的危险系数,来选择是否要远程报警或者远程锁车。对司机起到极大的震慑作用,提高了犯罪成本,使乘客的人身安全免遭侵害。
本套系统的设计初步思想就是行程比对,通过航迹推测的方式,可以防止当汽车驶进地下车库、荒郊密林的地方,实现定位无死角,使汽车的位置实时处于监管范围之内。
4 基于北斗系统的滴滴轨迹安全监测与预警系统技术报告
4.1 面部识别系统
设计目的:驾驶门禁系统监督一车一人相对应,核实司机信息。
概述:司机通过手机APP上传本人的面部图片,通过Adaboost算法提取面部特征值后,将其对应的数据存至数据库。开车前手机终端进行识别,识别后将信息传至控制器,若识别信息与数据库信息匹配,控制器则驱动磁力锁开锁。司机则可用钥匙解除汽车锁定。否则汽车无法解锁。
具体技术:
(1)采集司机照片;
(2)首先对图像进行灰度化、直方图均衡化处理;
(3)面部信息检测;
(4)Adaboost算法,可以与Haar特征相结合,使算法的性能大幅度提升。在进行识别的时候则可以得到更好的效果。
(5)通过PCA进行人脸识别:
①取训练集下指定个数的图像X=[MN,S]。
②计算每行的均值,每行的元素与均值相减。
③计算X的协方差矩阵C。
④训练投影到特征空间Y=PX=R,S。
⑤从大到小的顺序排列,特征空间P=R,MN。
⑥计算出C的特征值与特征向量。
⑦测试集投影,若测试集有Q张图像,那么降维后矩阵为R,Q。
⑧欧氏距离法,每一张图像R,1与特征值R,S最相近的一个图像,识别为该类。
⑨求出识别概率。特征脸方法经过K-L变换后由原来的高纬度向量转换成低纬度向量子空间,达到了非常好的降维效果,而且其运算复杂度低识别速度快,同时易于实现,识别率高。
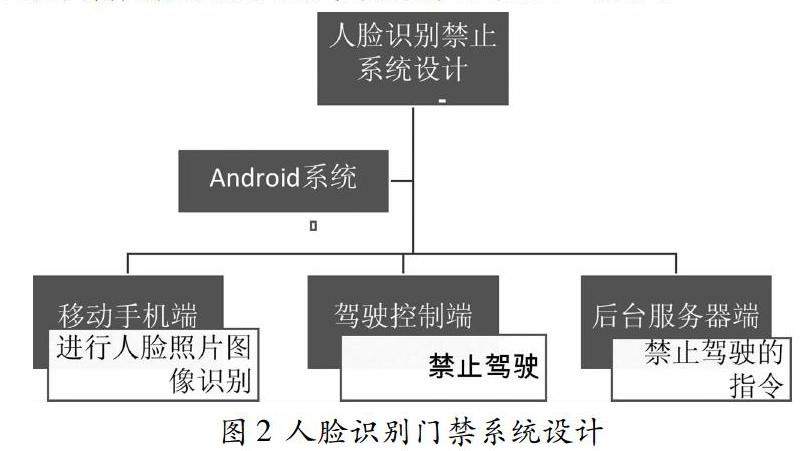
本文所提出的通过面部特征的识别,来控制汽车能否启动的方案,其中主要包含三大部分:移动客户端、驾驶控制端和后台的存储数据的服务器。其系统框图如图2所示。
人脸识别系统:
(1)开发平台的搭建:在Android系统上搭建平台进行面部特征的抓取。
(2)用户注册模块的实现:身份证注册,APP获取到人脸图像后,将上传至服务器,保存在某个文件中,并将其有关图片查询的信息保存,进行统一管理。
(3)人脸识别模块的实现。
(4)服务器端的实现。
4.2 语音识别系统
设计目的:从对话中获取信息,判断乘客是否安全。
概述:本设计选通过Linux嵌入式板卡来实现语音识别的任务。对原有系统进行改进,设计了一个成本较低、识别率高、体积小的语音识别系统。
具体技术:本套系统的声音鉴别需要在Linux系统上实现,使用编写好的声卡驱动程序,通过图形用户界面调用声卡驱动程序来将收集到的声音信号进行录制,应用程序可以通过socket发送或接收数据,所以我们通过socket将音频文件进行传输,在Ubuntu Linux环境下优化音频并改变文件格式,通过百度AI进行识别,识别结果开发板进行后续的处理控制。
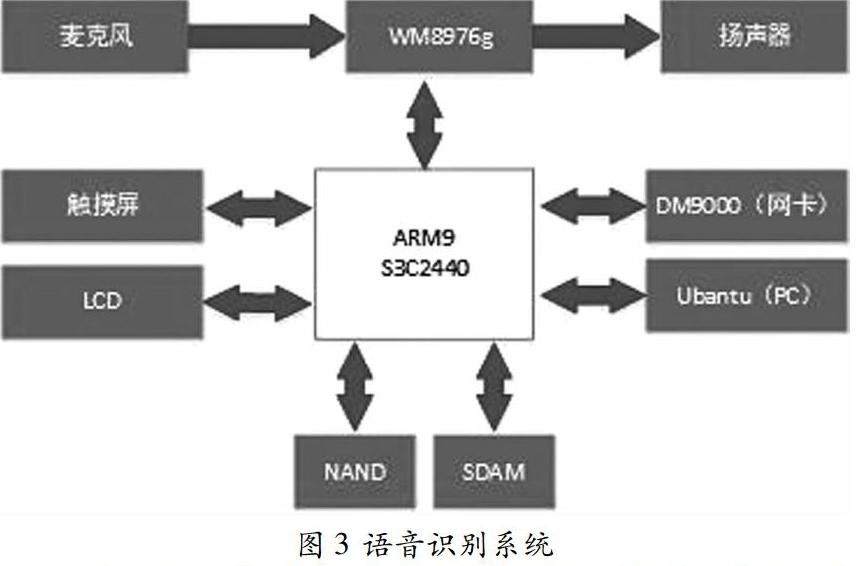
AI语音系统设计:
(1)硬件系统:本语音识别系统应用的主控芯片为S3C2440。
(2)软件系统:这里使用的是Linux操作系统逻辑框图。
音频采集的时首先会打开声卡,设置好采样频道数并量化位数,之后读取车内音频信号,并将音频信号存储,最后关闭声卡。
4.3 后台锁定
目的:当语音分析、路线判断出现问题时,可以控制车辆的锁定。
概述:该技术主要运用远程通讯控制模块、行车控制器,在车内乘客遭遇危险时远程锁定车辆。
具体技术:为了远程锁车避免发生事故、减少经济损失,我们的设计将先行判断汽车的行驶状态,再通过北斗定位,智能的对汽车实施锁车操作。
智能锁车系统设计:
远程锁车系统主要包含三部分内容,起远程监控作用的监控中心,收发指令的通讯控制模块和行车制动的行车控制器。
通讯控制模块靠近装载机进行安装,这样便于直接发送信号给行车控制器。行车控制器可以说是汽车运行的重中之重,车上的各个传感器、电磁阀都要由行车控制器控制。行车控制器将会收集汽车行驶的转速信息、整车角度信息、行驶速度信息、底盘倾斜角度信息等状态信息。我们就通过行车控制器对汽车的运行状态进行监控,远程通信控制模块将汽车的信息进行传输处理,结合北斗提供的定位信息,监控中心则可以对目标车的车况了如指掌。
锁车时,首先限制汽车的行驶速度,再限制汽车前进,最后限制发动机的启动能力,将行驶中的汽车逐步拉停,而这些步骤则需通过阀控制器、铲斗控制阀、动臂控制阀、启动继电器、发动机的ECU来进行实现。所有的锁车操作均由行车控制器执行,行车控制器损坏或缺失,装载机将无法运行。
4.4 北斗系统定位
目的:实时监测航迹,维护人身安全。
概述:当前位置的经纬度可以通过北斗卫星获取,同时也可运用北斗卫星自带的双向卫星通讯服务。由于地形和环境带来的干扰,卫星通讯无法正常进行,定位则会受到限制。为了避免在偏僻环境中定位不准确而使乘客产生危险,这套系统则通过北斗定位与航迹推算相结合的方式,获取相对准确的位置信息。
具体技术:DR算法则是利用现有的坐标,在传统定位方式受限制的情况下,我们就可以对已知的行驶方向、行驶速度和行车之间进行分析,对目标位置产生一个合理的估算。
这种方式不受外界环境影响,但需要每隔一段时间进行检测。通过车轮上搭载的电磁计数传感器,通过计算车轮旋转发出的脉冲数量,便知车在这段时间的行程。
根据在目前时间的行驶路程,可以计算出汽车行驶的速度。当计数时间比较短的时候,该时刻的平均速度则可以近似等于瞬时速度。
组合导航算法:
汽车正常行驶的时候通过北斗导航对其进行定位,而当卫星信号受到阻拦的时候,则启动DR算法对汽车的当前位置进行合理推测,以信号消失前的准确坐标为原点,通过车轮上的测速器获取汽车路程、速度信息,并根据行驶路线来推测每一时刻汽车的位置:
式中,x(t),y(t)是t时刻车在参考坐标系下的位置;x(t-1),y(t-1)是t-1时刻车在参考坐标系下的位置;θ是测向速度与参考坐标系北向的夹角。在这种情况下,通过近似隧道的轨迹为一长直路线,则可以根据信号消失前的坐标来对汽车的位置進行定位。
式中,λ(t)、L(t)分别为航迹推算过程中车的实时经度和纬度;λ0、L0分别为起点经纬度。
5 应用前景
在滴滴打车事故频发的情况下,轨迹安全监测与预警系统地合理应用能够很好改善这种情况。让乘客的人身安全得到更大的保障。利用轨迹安全监测可以实时追踪车辆的轨迹,并与实际路线进行比较,在行驶路线出现问题时,后台可以锁停车辆并报警,可以很大程度上降低受害者的危险。
猜你喜欢
儿童故事画报(2022年3期)2022-04-27
作文周刊(高考版)(2020年12期)2020-05-28
科学Fans(2019年6期)2019-07-26
商界(2019年12期)2019-01-03
故事作文·高年级(2018年11期)2018-11-19
IT经理世界(2018年20期)2018-10-24
中国经贸聚焦·英文版(2017年9期)2017-09-26
小康(2017年16期)2017-06-07
IT经理世界(2017年6期)2017-03-29
南风窗(2016年19期)2016-09-21
