基于软件定义的航天器分布式电源系统设计
2020-05-15 00:00张晓峰李海津
航天器工程 2020年2期
张晓峰 李海津
(北京空间飞行器总体设计部,北京 100094)
电源作为航天器的“心脏”,其性能直接影响到整个航天器任务的成败。集中控制的航天器电源通常都是基于主误差放大器(Main Error Amplifier,MEA)进行分流调节、最大功率调节或者充放电调节[1-5];近年来航天器出现了分布式电源的发展趋势,NASA、ESA、法国国家空间研究中心(CNES)、泰雷兹·阿莱尼亚宇航公司(Thales Alenia Space)等都做了一些前期探索[6-12]。由传统的集中放置于一处的架构变为分散放置,由单一的集中控制器变为分布式控制器。从结构、控制方面的分布化,提高了系统的适应性,同时也提高了系统配置组态的灵活性。但是,目前航天器分布式电源的发展还处在初期,技术还不成熟,很多都只停留在方案阶段。
航天器电源系统分布式设计可以借鉴地面系统中被广泛关注的微电网,实现先进的电能管理系统。将地面分布式的新概念及新方法引入航天器电源系统,提高航天电源系统电能转换、电能分配的效率,同时提升系统的可靠性、灵活性[13]。
本文首先介绍了传统的航天器电源系统架构以及发展分布式电源系统的需求,随后提出了一种基于软件定义的航天器分布式电源系统设计。
1 集中式电源系统架构概述
集中式航天器电源系统根据太阳电池阵能量传输方式可以分为直接功率传输拓扑和最大功率跟踪拓扑[1]。国内外大部分航天器采用直接功率传输的全调节母线架构,全调节母线架构又可以分为顺序开关分流调节器 (Sequential Switching Shunt Regulator,S3R)、串联型顺序开关分流调节器(Series Sequential Switching Shunt Regulator,S4R)、基于双向直流-直流(DC-DC)变换器技术的架构和转移式(Diversion)架构等。直接功率传输全调节母线的优点是功率转换效率高,供电母线电压始终稳定在规定范围内,稳压精度高。其电源系统结构如图1所示。

注:SA为太阳电池阵;VBUS为母线电压;SR为分流调节;BCR为充电调节器;BDR为放电调节器;MEA为主误差放大器;Cb为滤波电容;VBTA为蓄电池组电压;ENOX为分点开关。
图1 直接功率传输的全调节母线架构
Fig.1 Direct power transfer full-regulated bus architecture
除此直接功率传输拓扑之外,还有最大功率点跟踪方式(Maximum Power Point Tracking,MPPT)拓扑[1]。国外大多数相控阵雷达(Synthetic Aperture Radar,SAR)载荷卫星电源采用MPPT不调节母线拓扑,MPPT型不调节母线拓扑如图2所示。该类拓扑中太阳电池在光照期始终工作在最大功率点,太阳能电池能量利用率高,但是MPPT拓扑控制电路相对复杂。
现有的航天器电源大多采用集中式架构,通过发展分布式电源系统,可以在适应功率扩展、多任务柔性匹配、快速组装发射、各模块解耦方面更好地适应大型航天器的供电需求。

图2 MPPT型不调节母线架构Fig.2 MPPT type unregulated bus architecture
2 基于软件定义智能功率单元的航天器电源系统设计
近年来,NASA、ESA、CNES、泰雷兹·阿莱尼亚宇航公司等研究机构提出过一些航天器分布式电源系统概念及实现方法[7-13],这些系统主要存在以下问题。
1)电源控制器标准化程度较低
现有的分布式系统中,电源控制器种类多。不同的接入发电单元、储能单元、负载单元,均需要采用不同的电源控制器。不同的电源控制器之间无法通用,投入了人力进行重复设计、测试及生产,整个过程效率较低,不符合未来航天任务高频率、大密度、高效率的要求。另外,种类众多的电源控制器使得系统可维护性差。
2)系统控制方案鲁棒性较差
目前分布式系统中的功率处理电路采用了分布式架构,但是控制管理策略仍然采用集中控制,依赖系统中心控制器进行决策。中心控制器发生故障后,系统无法正常运行。可以将地面微电网控制策略应用于航天器分布式电源系统,减少对中心控制器的依赖,中心控制器发生故障后分布式系统仍然能够自主运行。
2.1 航天器分布式电源系统架构
本文设计了一种航天器分布式电源系统,其功率处理电路和控制管理均可以分布式运行,系统拓扑如图3所示。
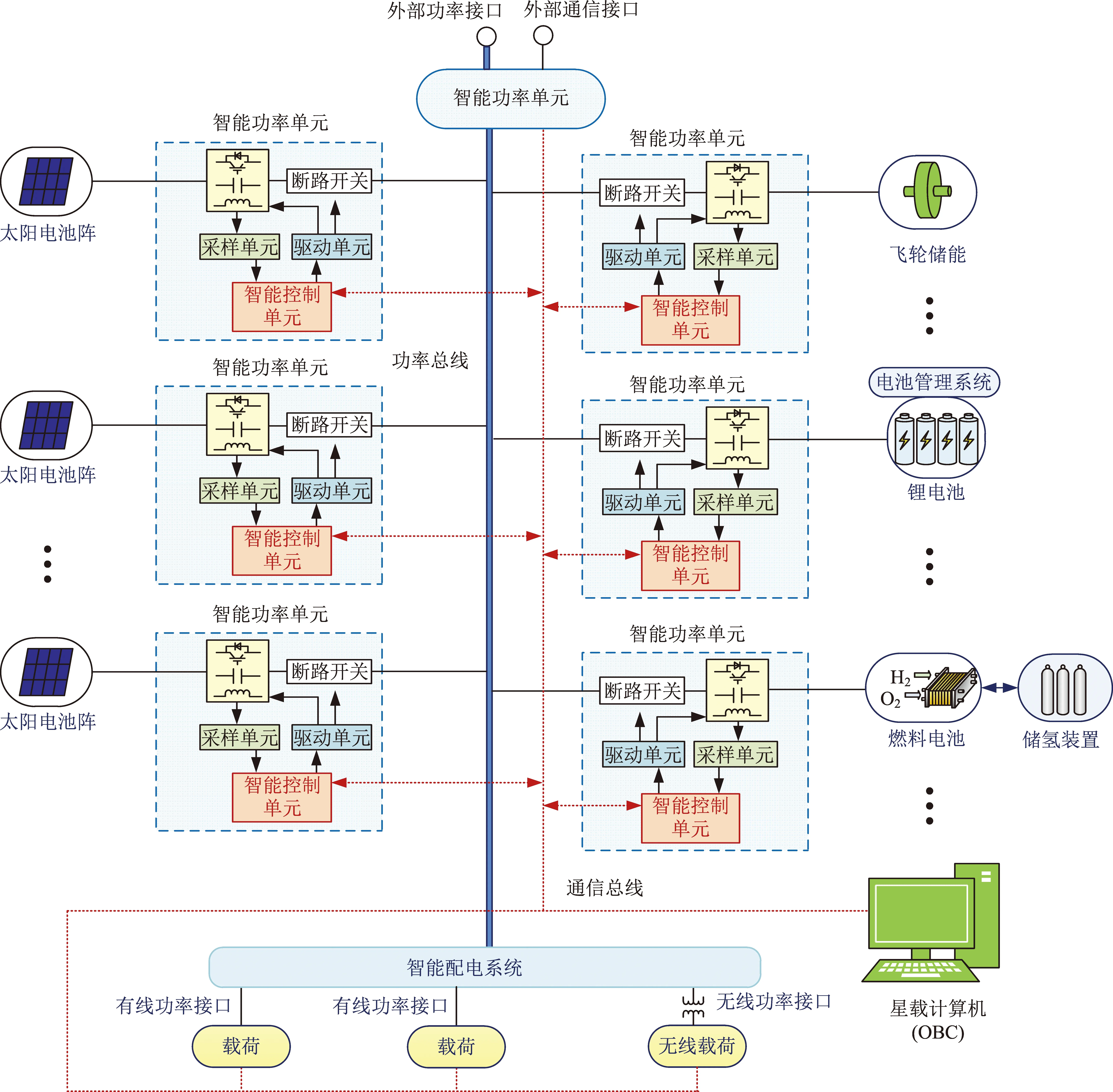
图3 航天器分布式电源架构Fig.3 Spacecraft distributed power supply architecture
系统主要特点有:
(1)该系统架构中采用了可软件定义的多模式智能功率单元,整个系统仅具有一种标准的双向功率变换器,可通过软件定义兼容传统的太阳电池阵功率调节器(Array Power Regulator,APR)模块和蓄电池充放电调节器(Battery Charge Discharge Regulator,BCDR)模块,可实现太阳电池阵MPPT控制、蓄电池本地化充电控制与放电控制。
(2)太阳电池阵、锂电池组、燃料电池、飞轮储能等多种发电、储能单元通过标准功率单元连接到公共的直流母线,由标准功率单元根据本地母线情况负责发电设备和储能设备的能量管理。
(3)智能功率单元的智能控制单元通过控制总线与星载计算机通信。智能控制单元接收计算机的软件定义指令和控制指令,并发送智能功率单元的自身状态,在星载计算机通信失效的情况下,智能功率单元亦可通过自身算法参与系统能量管理,保证母线性能正常。可软件定义的智能功率单元结构在下一节中详细介绍。
(4)系统通过组态配置和组合,就可以适应不同任务以及复杂应用场合,提升电源系统的设计效率。另外,智能功率单元也可被定义为载荷的供电单元或者系统与外部系统的接口单元。为了实现故障单元的快速隔离,智能功率单元输出侧安装了断路开关,可借鉴方向性电流保护实现系统的快速故障清除以及故障后系统重构。
2.2 可软件定义的智能功率单元
根据2.1节介绍,提出的航天器电源系统基于可软件定义的智能功率单元。智能功率单元是一种标准的功率变换器,兼容传统的APR模块和BCDR模块的功能,实现包括光伏电池、电池组在内的所有能源单元的接入。
智能功率单元的结构如图4所示,包括标准功率变换电路、采样单元、驱动单元和智能控制单元。

注:PI为比例积分;PWM为脉冲宽度调制。图4 可软件定义的智能功率单元Fig.4 Software defined intelligent power conversion unit
智能功率单元从原理来讲属于多功能功率变换器,选择四开关Buck-Boost可作为功率单元的拓扑,如图5所示。其具有非常宽的输入输出电压范围,可实现具有升降压功能,同时具备能量双向流动的特点。因此,功率拓扑通过数字控制方式可以实现多种工作模式,包括了母线电压模式、充电模式、放电模式、MPPT模式、分流模式、直连模式以及故障模式,满足了光伏电池、电池组、燃料电池等多种工作状态的需求[14-15]。
(1)母线电压模式以调节母线电压为控制目标,用于维护直流母线性能。

注:Iin为输入电流;Io为输出电流;Vin为输入电压;Vo为输出电压;IL为电感电流;g1~g4为半导体开关。
图5 四开关Buck-Boost电路
Fig.5 Four-switch Buck-Boost circuit
(2)充电模式以调节储能设备充电为控制目标,根据蓄电池组荷电状态和系统能量情况调节充电电流和充电电压,其充电特性和方式可编程设定。
(3)放电模式以调节储能设备放电为控制目标,根据蓄电池组荷电状态和系统能量情况调节放电功率。
(4)MPPT模式以获取太阳电池阵最大功率为控制目标,根据电池阵实际输出与最大功率点的关系调节电池阵工作电压。
(5)分流模式用于在不需要MPPT功能时,采用分流调节的方式控制电池阵输出并稳定母线电压。
(6)直连模式用于在MPPT功能和分流功能均失效时,将电池阵功率直接输出至母线,最大限度利用电池阵能力。
(7)故障模式是智能功率单元无法工作于上述各种模式时,将智能功率单元锁定的状态,避免故障蔓延。
所有智能功率单元的工作模式均可以通过软件定义,无需对硬件进行改动,提高了配置的灵活性,实现了多能源单元模块化的灵活接入。
2.3 可重构的分层控制系统
下垂控制是根据设定的下垂曲线进行调节,下垂控制中的母线电压参考值不再是固定值,随输出功率的变化而变化。下垂控制可以完全不依赖于通信线实现功率平衡,其缺点是母线电压变化范围大。航天器的载荷对供电品质要求很高,需要对下垂控制进行优化。本文提出了一种可重构的分层控制策略,控制架构如图6所示,控制系统重构如图7所示,星载计算机发生故障时,各功率单元中的底层控制不依赖通信以下垂方式独立运行。顶层负责能量管理优化;第二层负责补偿下垂控制造成的电压偏移及模式选择;底层下垂控制负责电压和功率的调节。其中顶层和第二层位于星载计算机内,底层位于功率单元的智能控制单元中。星载计算机正常时,三层同时工作,实现最优的控制目标,此时系统调节的响应曲线如图8所示,底层基于下垂曲线智能功率单元的输出电压参考值,第二层基于母线电压的偏移,向上或者向下平移下垂曲线。

图6 控制架构Fig.6 Control architecture

图7 控制系统重构Fig.7 Control system reconfiguration

注:Vdc为直流电压;idc为直流电流;idc(limit)为限制电流。
图8 分层响应曲线
Fig.8 Multiple-level response curve
3 仿真验证
为了验证分布式电源系统控制的鲁棒性,利用PSIM仿真软件搭建了分布式电源系统仿真模型,其中包括3个供电单元和一个载荷单元,3个供电单元均采用了标准的功率单元。3个电源的输出电压均为48 V,母线电压为100 V,载荷功率4000 W。图9是电压控制单元发生故障的情况。在故障前,单元1工作在电压控制模式,控制母线电压,输出功率2600 W;单元2工作在放电模式,输出功率460 W;单元3工作在放电模式,输出功率940 W。在0.5 s时刻,单元1发生故障,输出功率降为0 W。此时单元2通过检测本地母线电压,从放电模式切换到电压控制模式,输出功率变为3060 W,单元3模式和输出功率不变。直流母线电压最大跌幅3.5 V(3.5%)。母线电压波形如图9(a)所示,各单元的输出电流如图9(b)所示。由此可见,在某个单元发生故障瞬间,正常单元可以不依赖通信,通过检测本地电压切换工作模式,保证载荷供电的连续性。故障切换的鲁棒性高,切换完成后顶层和中层控制可以根据优化算法,重新调整功率配置。
图10所示的是通信发生故障的情况。同样,故障前单元1工作在电压控制模式,控制母线电压,输出功率2600 W;单元2工作在放电模式,输出功率460 W;单元3工作在放电模式,输出功率940 W。在0.5 s时刻,通信发生故障,所有单元检测到通信故障切换为下垂电压控制模式,输出功率均变为1333 W。直流母线电压最大尖峰4.2 V(4.2%)。母线电压波形如图10(a)所示,各单元的输出电流如图10(b)所示。由此可见,在通信发生故障时,所有单元均切换为下垂模式,能够正常输出功率,载荷供电不会发生中断,系统控制具有极高的鲁棒性。待通信恢复后,顶层和中层控制可以重新调节各单元工作模式和功率分配,实现最优控制。综上所述,在不同故障下,分布式电源系统中的标准功率单元能根据采样信息在多种工作模式之间切换,实现故障的快速响应和载荷供电的连续性。

图9 电压控制单元故障波形Fig.9 Voltage control unit failure waveforms

图10 通信故障波形Fig.10 Communication failure waveforms
4 基于智能功率单元的航天器电源系统优势
本文提出的基于软件定义智能功率单元的可重构航天器电源系统在系统架构、模块化接入、智能管理等方面具有优势,具体可归纳为以下4个方面。
1)灵活、可重构的积木式电源系统架构
分布式架构采用多个标准的DC/DC功率单元组网来取代传统的电源控制器,通过多个DC/DC功率单元分散放置,降低了热处理难度。同时,采用分布式架构后,电池阵不再要求统一的分阵设计,布片自由度大幅增加,不仅能够有效提高布片率和布片灵活性,还能够支持储能设备升级为电源包,提高了能源利用率和系统功率密度。另外,采用分布式架构集成多种发电单元、多种储能单元,能提升系统的可靠性。分布式架构为软件定义,针对不同航天器任务硬件不变,可复用程度高,最终可实现商用现货采购。
2)可柔性设计和软件定义的智能功率单元
分布式系统采用可软件定义的多模式功率单元,整个系统仅具有一种标准的功率变换器,即兼容传统的APR模块和BCDR模块,实现所有能源单元的接入。仅通过组态配置和组合,适应不同任务以及复杂应用场合,极大提升空间电源系统的设计效率。数字智能化使得分布式电源控制器具备“弹性”空间,为用户提供了系统升级、重组、拓展的能力。用户可根据任务所需的不同功能和性能,实现功能的升级和重组,通过软件定义实现功率单元工作模式的设定以及控制器参数(如比例积分微分(PID)控制器中的比例、微分、积分参数)的修改,使电源控制器的性能达到最佳。用户还可根据不同任务的电性能要求,设置电源控制器的电源安全管理特性,包括输入、输出过流过压保护值、软启动时间等参数。
3)智能化的多能源协同控制与能量管理
本文提出的系统为了提升其可靠性及灵活性,应用于大型航天器可引入多种发电单元、储能单元。多能源的加入使得系统潮流分布更加复杂,基于不同类型元件特性的相关性分析,制定系统的多能源协同方案,利用多源性能互补实现性能的优化。功率调节模块和电池充放电模块各自具备智能管理能力,能够根据系统状态自主完成工作模式转换,实现能量的智能管理。发生故障时,能够进行自我故障诊断,从系统中自主隔离出来。需要注意的是,由于系统中发电单元和储能单元种类多、数量多,控制系统设计复杂、系统稳定性差,传统的稳定性设计方法已经不能满足复杂系统的要求。需要基于智能功率单元具有多种工作模式的特点,建立新的稳定性分析工具并进行稳定性设计,实现系统的可靠、稳定运行。
4)标准化的航天器分布式电源架构规范运行体系
虽然地面的分布式电源系统已经出现了部分标准,如微电网、智能电网等相关标准,但是航天器分布式电源系统的标准目前仍然缺失。基于本文提出的航天器电源系统架构以及可软件定义的智能功率单元,可以为分布式空间电源系统接入规范体系的建立提供参考,为分布式空间电源系统的行业标准提供建议。
5 结束语
本文通过介绍传统航天器电源系统的分类和特点,面对中大功率复杂(组合)航天器,提出了一种基于软件定义的航天器分布式电源系统设计。基于分布式架构设计了可重构的分层控制策略,通过软件定义的智能功率单元、智能化能源协同控制与能量管理,实现系统高效、可靠运行。该系统对数字控制技术、宽禁带半导体开关技术等提出了需求,后续还将对相关技术开展持续研究。
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
煤气与热力(2021年9期)2021-11-06
军民两用技术与产品(2021年5期)2021-07-28
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
软件(2020年3期)2020-04-20
电子制作(2019年22期)2020-01-14
国际太空(2019年9期)2019-10-23