
一种建筑垃圾分拣机器人的设计
2020-05-11 12:24房剑飞吴金文袁祖强
数字技术与应用 2020年2期
房剑飞 吴金文 袁祖强

摘要:随着社会经济的发展,建筑垃圾已经成为了城市发展的负担,建筑垃圾资源化利用研究已经成为热点。本课题设计了一种桁架式建筑垃圾分拣机器人,快速有效地进行垃圾分拣,达到智能识别、自动分拣的目的,减轻了人工劳动强度,提高了资源利用率。
关键词:建筑垃圾;分拣;机械手
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2020)02-0163-02
0 绪论
随着社会的进步,经济的发展,建筑垃圾围城现象屡见不鲜。但建筑垃圾其实是一种“放错地方的资源”,已经引起了社会和科研的重视。当前建筑垃圾主要依靠人工方式分拣、填埋,方式传统粗犷,效率低,甚至引起环境污染。虽然也有一些基于风选技术或者其他特殊手段的大型筛选机械设备,但是也存在筛选不准确,分拣不干净等弊端。基于机械电子技术的分拣机器人,能够很大程度地减少工人劳动强度,实现分拣的自动化和智能化,是一种有效的建筑垃圾处理手段。
国外发达国家早年就开展了这方面的研究,目前也拥有了相对成熟的技术。譬如日本Shitara Kousan废弃物处理厂通过拥有拟人化手臂的智能机器人,基于各类光学传感器对垃圾进行扫描检测,能够有效地识别建筑垃圾中的金属、塑料凳各类材料。芬兰ZenRobotics公司设计的分拣机器人通过三维扫描器、金属、光学、重量等多种传感器进行材质数据信息的收集、训练,能够高精度分拣不同类的垃圾碎片。我国目前拥有的建筑垃圾分拣技术还不够成熟,就应用方面更多地还是依赖于自动化程度较低,分拣效率和效果较差的振动筛技术。本课题将设计一种桁架式建筑垃圾分拣机器人的机械结构,以能够更加快速有效分拣建筑垃圾,达到智能分拣、自动分拣、再生利用建筑垃圾的目的。
1 总体方案设计
1.1 基础技术参数确定
机器人自由度、坐标形式、有效负载、工作范围、规格参数等基础技术参数决定了机器人的特性。结合研究对象以及实际应用进行建筑分拣机器人基础技术参数的确定。
1.1.1 自由度
无论什么形式的机器人,自由度的数量直接决定了其灵活程度。自由度越多,灵活性越强,但相应的结构越复杂,重量越大,控制难度也越大。一般而言,桁架式机器人有5到6个自由度即可满足其使用要求。基于建筑垃圾分拣机器人应用场合,本次设计的机器人主要包括X向和Z向的直线运动,纵向的旋转运动,分拣手爪的开合运动。
1.1.2 坐标形式
机器人坐标形式多样,从常见的直角坐标系、圆柱坐标系、关节型坐标系到结构复杂的SCARA型和并联型。建筑垃圾分拣过程中,希望机器人能够操作简单,结构稳定,移动位置精度高,所以综合考虑选择直角型坐标系。
1.1.3 有效负载
本次设计对象主要完成建筑垃圾的分类和目标抓取工作,考虑到作用对象的质量,保证作业的高效稳定,设定有效负载为10kg。
1.1.4 工作范围
机器人工作范围通过工作空间来表示,主要根据机器人操作范围和运动轨迹来确定。根据作业要求,设计机器人的横向和纵向的工作范围为5m×3m。
1.2 结构设计
分拣机器人采用桁架式结构进行设计,结构图如图1所示,由立柱、横梁、托板、竖轴等几部分组成。立柱是分拣机器人最基本构件,与横梁连接,固定在地面上,选择方钢管作为立柱。横梁置于立柱上方,是机器人的重要承重部件,作为机器人的X轴,其刚度和强度决定了機器的精度,材料选择Q235钢。竖轴是机器人的Z轴,下方安装机械手爪,实现机械手上下运动。托板两部分互相垂直,呈现L型,分别于横梁和竖轴平行连接。
机器人运动过程中,利用步进电机带动齿轮运动,齿轮与横梁和竖轴上的齿条相啮合,实现水平和上下移动,水平方向的移动为X轴运动,上下方向的移动为Z轴运动。移动过程中通过安装限位器,控制移动范围。最后机械手爪负责抓取物体。
2 关键部件设计
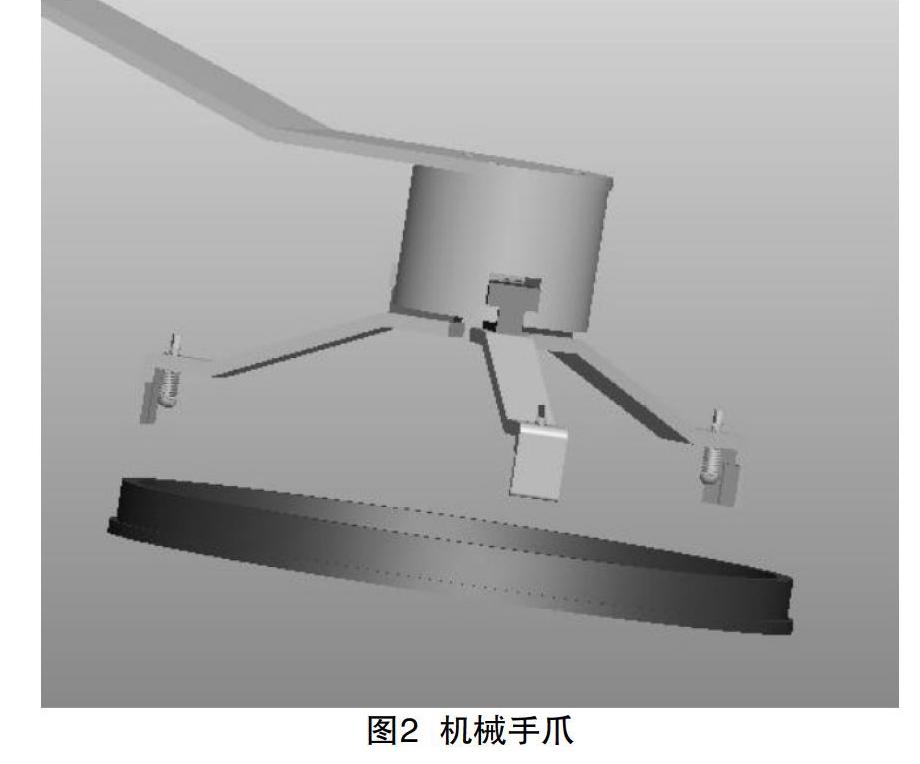
机械手爪主要用于抓取和握持物体,是工业机器人尤其是分拣机器人的关键部件。从功能性出发,要求机械手爪机构简单,工作灵活,输出力适中。因此设计机械手爪最大输出力大小为10kg,驱动方式选择气动方式。机械手爪设计为如图2所示的三爪定心结构,抓取类型为直线平移运动形式,由气缸提供动力,气缸选择结构简单,易于制作的MHS3-40型气缸。
3 控制流程设计
根据控制系统模块化功能需求分析,控制系统分为视觉模块、信息采集模块、主控制模块、动作处理模块四大部分。系统上电处理后,系统程序初始化调试,机械手臂处于零位,准备进行工作。传送带装载垃圾进行传输,进入到视野区域后,视觉模块循环工作,控制工业相机连续拍照,图像信息经过一定处理,结合信息采集模块得到的传感器等信息传送至主控制模块进行处理分析,获得垃圾位置及材质等有用信息。当光电传感器显示垃圾已经达到机械人处理位置时,主控制模块通过调用动作处理模块,实现机械手跟踪抓取指定目标垃圾。
4 总结
智能分拣机器人的研究有利于实现建筑垃圾的精细化处理,降低了人工劳动强度,提高了生产效率,是一种高效安全的垃圾分拣手段,在建筑垃圾资源化处理方面具有重要的价值和意义。
参考文献
[1] 贺雅琴.自动物料分拣机器人系统的关键技术研究[D].广州:华南理工大学,2011.
[2] 郑先报.建筑垃圾机器人分拣技术研究[D].泉州:华侨大学,2019.
[3] 朱金权.桁架式机器人的机械设计与研究[J].中国新技术新产品,2014(17):18-21.
[4] 靳璞磊.基于智能相机和工业机器人的自动分拣技术研究[D].南京:南京航空航天大学,2016.
Design of a Construction Waste Sorting Robot
FANG Jian-fei,WU Jin-wen,YUAN Zu-qiang
(Pujiang College, Nanjing University of Technology, Nanjing Jiangsu 211100)
Abstract:With the development of social economy, construction waste has become a burden on urban development, and research on the utilization of construction waste resources has become a hot spot. This project designed a truss-type construction waste sorting robot to quickly and effectively perform waste sorting, to achieve the purpose of intelligent identification and automatic sorting, reduce manual labor intensity, and improve resource utilization.
Key words:construction waste; sorting; manipulator
猜你喜欢
制造技术与机床(2018年11期)2018-11-23
科学与财富(2016年29期)2016-12-27
青春岁月(2016年20期)2016-12-21
科学与财富(2016年15期)2016-11-24
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
机电信息(2014年29期)2014-02-27
河南科技(2014年11期)2014-02-27
