
基于ZigBee的漏斗车运行状态监测系统设计
2020-05-09 09:56王继鹏林建辉陈显燕春光
物联网技术 2020年4期
王继鹏 林建辉 陈显 燕春光


摘 要:针对部分铁路漏斗车运行时,由于底门闭合故障而引发货物泄露这一现象,基于ZigBee技术设计了漏斗车运行状态监测系统。该系统通过霍尔开关传感器监测漏斗车底门开闭状态,在底门故障时用PTC08串口红外摄像头抓拍图像,依靠ZigBee节点传送数据至ZigBee协调器,并通过ARM网关的GPRS模块将数据传输到远程PC机及手机客户端供用户确认。经测试,该系统成本低、功耗低,可及时发现事故隐患,满足预期的使用条件和技术要求。
关键词:物联网;ZigBee;漏斗车;监测系统;ARM网关;GPRS通信
中图分类号:TP393 文献标识码:A 文章编号:2095-1302(2020)04-000-03
0 引 言
漏斗车是一种铁路货车,其车体底部有漏斗,端壁向内倾斜,适用于运输散装大宗货物,如煤、矿石等[1]。然而,漏斗车的卸货口位于车身底部且底门开关机构故障率较高,在行车过程中一旦出现底门关闭不严等故障,将导致货物泄漏,毁坏车体及沿线设施,污染环境,甚至威胁行车安全[2]。而针对该问题,目前除依靠监测人员人工检查底门开闭情况外,还可利用安装在铁轨附近的漏斗车底门检测装置实现自动检测[3]。但漏斗车编组数量多,又无车载电源,上述检测装置只能在站点的固定位置安装,无法在行车过程中进行实时监测。因此研制一套低成本、低功耗、可靠性高的可实时监控漏斗车行车状态的智能监测系统对保障漏斗车安全运行具有重要意义。漏斗车模型如图1所示。
1 系统整体架构
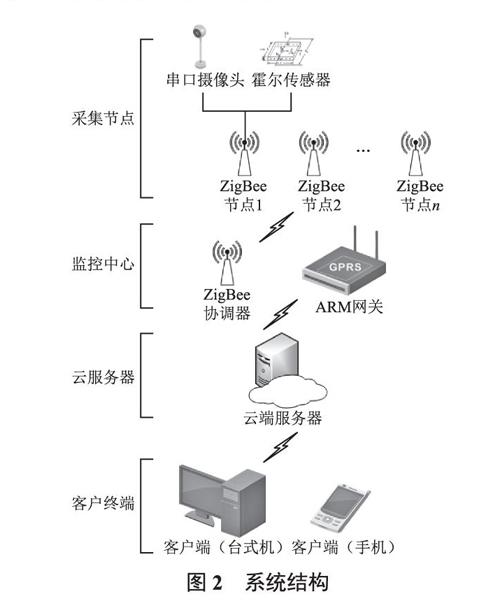
该监测系统由采集节点、监控中心、云服务器、客户终端构成。其中,采集节点安装在漏斗车的底门外,由ZigBee通信模块、串口摄像头、霍尔传感器、电源模块组成;监控中心安装在机车内部,由ZigBee协调器、ARM网关组成;云服务器使用阿里云服务器ECS;客户端由台式机和手机客户端组成。系统结构如图2所示。
该系统的优点及功能如下:
(1)系统成本低、功耗低,可实时监测漏斗车底门状态与节点电量信息;
(2)系統可实现网关与服务器的GPRS通信;
(3)系统底门异常时可及时向客户端报警并显示当前底门处照片,机车监控中心蜂鸣器鸣响示警。
2 系统详细设计
2.1 采集节点
每辆漏斗车均有4个底门,在每个底门处安装一个采集节点,用于监控漏斗车底门状态。
ZigBee通信模块主要由CC2530F256最小系统、功率放大器电路组成。CC2530芯片采用增强型51 CPU,带有无线收发功能,具有多种低功耗工作模式,使得它尤其适合作为采集节点的主芯片[4]。功率放大器电路采用RFX2401C芯片,可大大提高有效传输距离,以满足漏斗车的使用要求[5]。
霍尔开关传感器采用ES3144霍尔元件,该传感器连接在CC2530的I/O口上,安装在漏斗车底门外,并在底门处安装磁铁测点。当底门闭合时,霍尔元件磁感应强度将超出工作阈值,此时输出导通,电平变低;当磁铁测点远离传感器时,表示底门故障异常开启,此时霍尔元件输出关断,电平变高[6]。
串口摄像头采用PTC08串口红外摄像头,支持夜视功能。该模块可以进行图像采集、控制、数据压缩、串口传输,输出标准的JPEG图像,设置拍照图像大小及图像压缩比例,且支持3线制TTL电平[7],可直接与CC2530进行串口通信。
电源模块使用AS1117AR芯片,将电池盒的电压转化,为ZigBee通信模块供电。同时通过CC2530芯片I/O口和三极管为霍尔传感器模块和串口摄像头模块提供5 V电压。另通过电量测量电路连接CC2530的A/D管脚,测量当前电池盒的电池电量。
采集节点的程序采用软件IAR编写,其设计流程如图3所示。初始化系统操作后,采集节点自动参加协调器网络。先读取非易失存储区NV中的车辆信息,包括车号、底门编号、定时唤醒时间等,并采集当前电量、霍尔传感器信息发送给协调器。再打开I/O口为摄像头供电,延迟2.5 s后配置串口相机并拍照,之后读取照片数据并发送。发送完成后等候协调器回复。若采集节点接收到配置信息指令,则将新数据写入非易失存储区NV中。当采集节点接收到确认接收指令后,关断摄像机电源,设置定时唤醒和外部中断唤醒,并进入低功耗PM2模式。设置睡眠定时时间,当达到定时时间后,系统自动唤醒。霍尔传感器的模拟输出连接在CC2530的I/O处,作为外部中断源。当底门异常开启时,系统会被唤醒,待系统唤醒后,程序循环运行。
2.2 监控中心
监控中心用于上传采集节点发来的数据信息、处理服务器发送的指令信息,其硬件架构如图4所示。
监控中心主控芯片为Exynos4412芯片,该芯片采用ARM Cortex-A9四核处理器架构,稳定性强、可靠性高,适用于对性能和处理能力有更高要求的嵌入式系统应用场合[8]。
GPRS模块采用SIM800A,该模块支持RS 232串口和TTL串口,具有语音通话、短信、GPRS数据传输、文本播报(TTS)和基站定位等功能[9]。
ZigBee协调器程序流程如图5所示。系统上电初始化后,协调器创建网络,等待采集节点加入。当接收到节点采集的数据信息时,协调器通过串口发送给ARM网关。若收到ARM网关给某节点的配置信息指令,则将该指令发送给采集节点,并继续等待接收指令。若为确认接收指令,则转发指令后结束该次数据传输,进行下一次数据传输。
ARM网关的流程如图6所示。系统同时接收来自节点的数据和服务器的指令。若接收到服务器的配置信息指令,则暂存至FLASH中;若接收到来自采集节点的数据信息,则将该数据通过GPRS模块转发至服务器,并查找是否有缓存在FLASH中的该节点的配置信息指令。若有,则先发送配置信息指令,更新采集节点非易失存储器数据后再发送确认接收指令;若未找到,则直接发送确认接收指令,结束该次数据传输。
2.3 服务器与客户终端
服务器采用阿里云服务器ECS。ECS是一种可支持弹性扩展的IaaS级别云计算服务器,它运行在云端,大大降低了用户建设维护成本,更加稳定可靠[10]。使用阿里云服务器,需要在阿里云官网完成基本信息注册,按照项目需求配置CPU参数、运行内存和云存储盘的大小,选择合适的操作系统,并购买相应服务。
该监测系统选择在Ubuntu 14.04 32位操作系统上搭建Java环境和MySQL数据库。在监测过程中,监控中心的ARM网关经GPRS模块通过TCP协议将信息数据发送至阿里云服务器对应的域名,服务器对数据进行处理。当服务器解析到异常数据时,会向访问它的客户终端发送报警信息。用户可以通过网站和安卓客户终端访问公网IP,查看服务器上的数据或对监测节点进行参数配置。
3 系统功能测试
搭建实验环境,使用迅为iTOP-4412开发板加GPRS模块作为ARM网关,连接ZigBee协调器作为监控中心,如图7(a)所示。用ZigBee通信模块连接霍尔传感器、串口摄像头、供电电池盒,作为采集节点;在金属支架上贴磁性测点,模拟漏斗车底门,如图7(b)所示。
在實验过程中,当磁性测点紧靠霍尔传感器时,表示底门紧闭,采集节点定时时间到后,系统唤醒,自动采集数据并发送给协调器,摄像头抓拍照片传送给协调器。图8(a)为此时相机所拍图片。人为移动磁性测点远离霍尔传感器,表示底门故障,异常打开,此时传感器输出电平突变,触发外部中断唤醒系统进行数据采集并发送,摄像头抓拍图片如图8(b)所示。
4 结 语
本文设计了一种可以实时监测漏斗车底门状态的监测系统,该系统可以在行车过程中及时发现漏斗车底门故障,并通过蜂鸣器报警提醒机车驾驶人员,还可通过GPRS远程传输信息至客户端。用户可通过台式机或手机客户端远程登录查看底门状态数据和图片,操作简单,显示直观,具有一定的推广价值。
参考文献
[1]冯创友.出口阿根廷石砟漏斗车的研究[D].成都:西南交通大学,2018.
[2]贺宝亭.K18型煤炭漏斗车底门开闭机构应用故障分析[J].中国战略新兴产业,2017(12):149-150.
[3]汪永元,许克亮,张浩,等.底开门漏斗车关门状态检测系统及方法:CN107688797A [P].2018-02-13.
[4]王易川,李文钧.基于ZigBee,WiFi和云服务器集群的智能家居系统设计[J].物联网技术,2018,8(1):76-79.
[5]查品先,朱苏磊.无线射频的交通事故现场报警系统设计[J].上海师范大学学报(自然科学版),2018,47(2):237-241.
[6]李思霖.霍尔效应原理及应用研究[J].电子世界,2018(2):80-81.
[7]陈川.基于ARM Cortex-M4系列的图像型火灾报警系统设计[D].成都:西华大学,2016.
[8] 陈启武.基于物联网的铁路货车行车状态在线监测系统[D].成都:西南交通大学,2017.
[9]任俊杰.基于物联网的智能药箱在冷链运输中的监控系统设计与实现[D].桂林:广西师范大学,2018.
[10]薛家祥,叶興,吴坚.基于阿里云平台的光伏发电智能监控系统[J].自动化与仪表,2019,34(1):15-19.
