
双离合器自动变速器换挡过程的内模控制*
2020-05-09 08:54陈昊闻刘峰宇
汽车工程 2020年4期
陈昊闻,陈 俐,刘峰宇
(上海交通大学海洋工程国家重点实验室,动力装置与自动化研究所,上海 200240)
前言
双离合器自动变速器(dual clutch transmission,DCT)采用两组离合器进行换挡,可兼具手动变速器高效和液力式自动变速器无动力中断的优点[1],近年来发展为主流变速器形式之一[2-4]。换挡时离合器接合过程控制不当,易引起传动系冲击,损坏传动部件,并降低乘坐舒适性[5-8]。
离合器压力控制的接合过程可视为离合器主、从部分转速差对理想转速差的跟踪控制[9-11]。通过控制离合器压力和发动机输出转矩,可较为准确地实现转速差跟踪[12-15]。但是,由于离合器转矩模型不准确、发动机输出转矩控制不精确、道路阻力时变且难以准确获知等原因,离合器接合过程仍然存在跟踪误差大、接合品质低的问题。针对该问题,近年来一些先进控制方法得到研究,比如,模型参考控制[16],应用微分平坦前馈与反馈的非线性控制[17-19],引入道路阻力估计与状态观测算法的最优控制[20-22],或引入自适应观测器估计摩擦因数与传动系统的状态[23-25]和鲁棒控制[26]等。
本文中提出基于内模控制(internal model control,IMC)的思路进行离合器接合的压力控制。IMC控制结构直观,所需调节参数少,具有对偶稳定性、理想控制器特性和零稳态偏差特性[27-29]。算法较简单,单入单出系统的IMC与经典PID控制的计算量相当[30],近年来应用于跟踪控制,效果良好,比如,发动机涡轮增压压力跟踪[28,31],DC-DC变换器中的电压与电流跟踪[32],稳压电源的电压跟踪[33],机械手臂的轨迹跟踪[34]等。本文中研究的离合器接合过程时间短,一般不超过1 s[35],时变与不确定因素多,比如车辆行驶阻力矩、离合器摩擦片的摩擦因数等,跟踪控制难度较大。
本文中在经典IMC的基础上,从两方面提高离合器主从轴的转速跟踪性能。首先,考虑到离合器压力控制响应较快,发动机转矩控制响应较慢且精度较低,将离合器压力视为控制输入量,而将发动机转矩视为干扰项,并分解为观测值(确定部分)和观测误差(不确定部分),依据观测值设计干扰补偿器,嵌入IMC闭环,可减少观测误差的影响,从而提高跟踪精度。其次,考虑IMC逆控制器对反馈信号滤波带来延迟,设计超前校正环节,克服延迟,以提高响应能力。
本文中首先建立双离合变速器惯性相阶段动力学模型,然后设计IMC控制器,包括逆控制器、干扰补偿器和超前校正控制器,并进行稳定性分析。开展MATLAB/SIMULINK仿真和台架实验,验证IMC控制器在不同工况下的转速跟踪性能。
1 模型建立
考虑等效两挡模型,以升挡为例,在升挡的惯性相阶段,分离离合器(离合器1)完全分离,接合离合器(离合器2)处于滑摩状态,因此,动力传动系统模型可简化见图1。
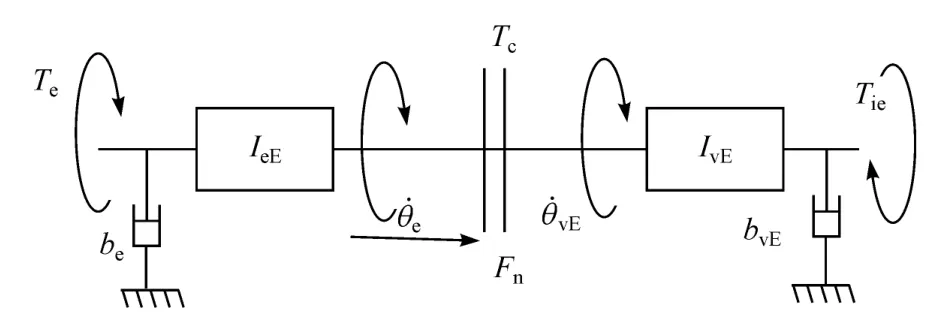
图1 双离合变速器动力传动系统简化模型
1.1 动力学模型
离合器2接合过程的动力学方程为

离合器力矩Tc(t)按下式计算:

式中:μk为动摩擦因数;N为摩擦副的数量;Rcp为摩擦界面的等效摩擦半径;Fn(t)为摩擦界面正压力。
1.2 状态方程描述
将式(1)和式(2)写为状态空间形式:

离合器正压力Fn(t)为控制输入,将发动机输出力矩 Te(t)和车辆行驶阻力矩 TiE(t)视为干扰项,即:
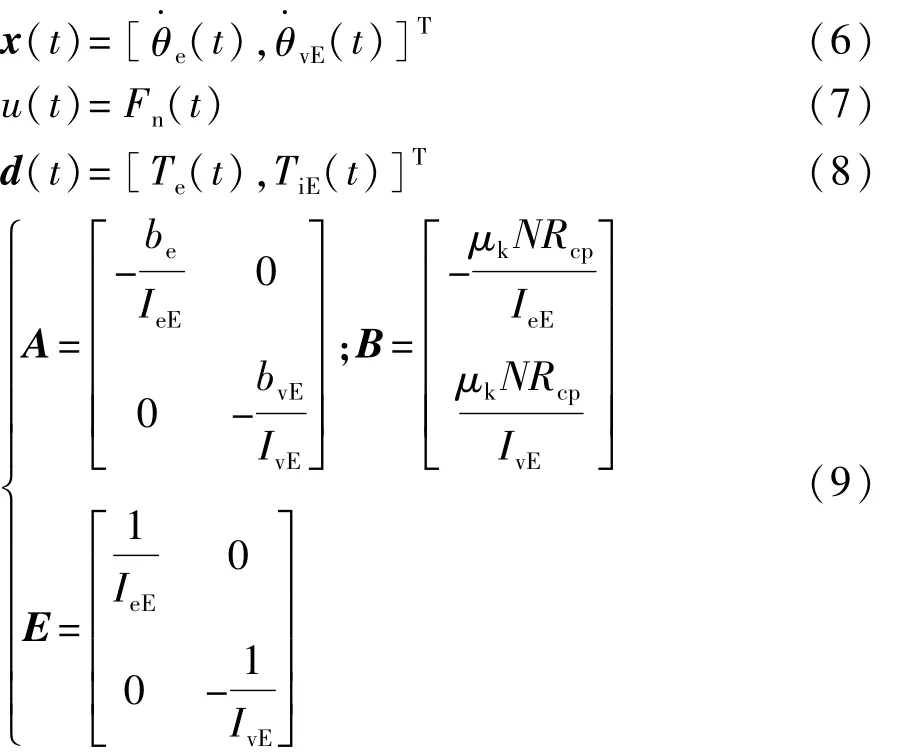
系统输出y(t)为离合器2主动端与从动端转速差,即

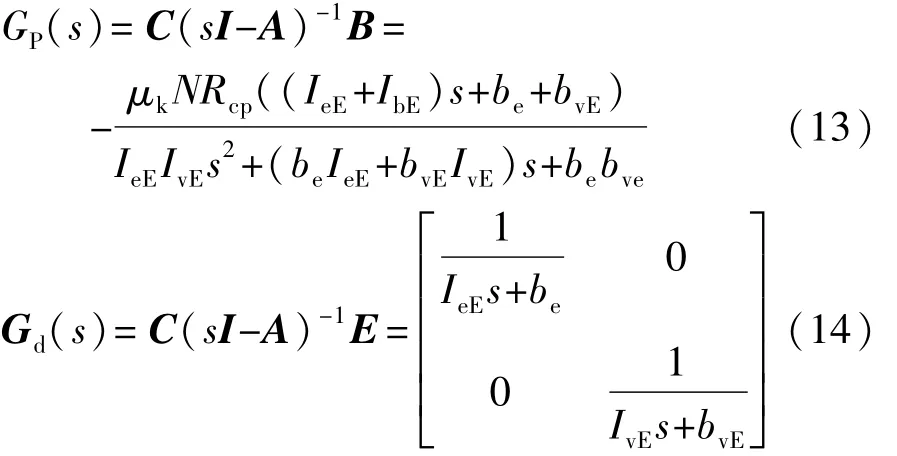
1.3 传递函数描述
将式(4)和式(5)写成传递函数形式:

其中
2 IMC控制器设计
本文中提出的IMC控制框架如图2所示。
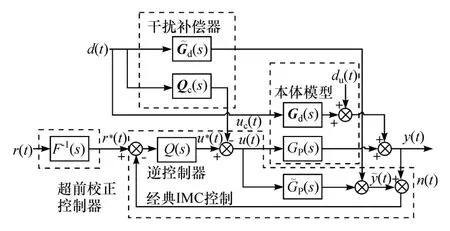
图2 引入干扰补偿与超前校正的IMC控制器
2.1 超前校正控制器设计
为使离合器结合过程平顺,参考输入r(t)一般设计为如下光滑可微函数[35-36]:
边界条件为

考虑IMC的逆控制器Q(s)一般包含1个1阶滤波器,用于过滤反馈信号的噪声[16,23]。为抵消滤波器滞后的影响,本文中在控制输入u*(t)之前设计超前校正控制器,其传递函数为滤波器F(s)的逆函数 F-1(s),即

参考输入r(t)光滑可微,因此虽然超前校正控制器F-1(s)含微分项,但是不会产生额外噪声或者突变。
2.2 逆控制器设计
逆控制Q(s)按如下设计:



2.3 干扰补偿器设计
式(12)中的干扰项可以通过在线观测得到[18-19],因此可利用观测值设计干扰补偿器,以提高跟踪精度,减少响应时间。

可见,当(Gd(s)-)=0时,干扰对误差Z(s)无影响,因此,G~d(s)按如下设计:
根据图2,在补偿器的 G~d、Qc的作用下,干扰D(s)对输出 Y(s)的增益为
补偿器Qc的设计目标为使上述增益为零。假设模型匹配,即,可得Qc(s)的计算式为

3 稳定性分析
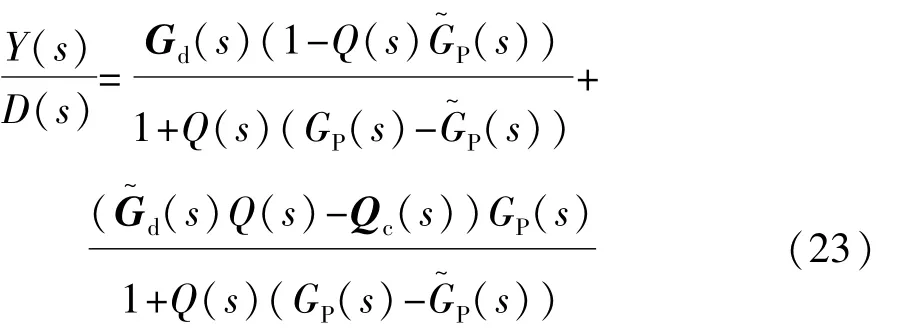
图2中,考虑观测误差 du(t)和测量噪声 n(t),控制系统的输入输出关系为

其中:

由劳斯判据可知,式(24)1阶系统与式(18)2阶系统稳定的充要条件为特征多项式各项系数同号[49]。由于惯量(IeE,IbE)、阻尼(be,bvE)为正,因此G~P、G~d、Qc稳定。此外,只要滤波参数 λ为正,则逆控制器Q与超前校正控制器F-1(s)稳定。
在模型匹配假设条件下,式(26)中 GR(s)的分母为 1,稳定性仅取决于 Q(s)GP(s)F-1(s)。又由于Q(s)、GP(s)、F-1(s)分别稳定,则其乘积的极点实部也为负,因此,GR(s)稳定。同理可证,GD(s)、GN(s)、GDu(s)也稳定。因此,式(25)控制系统是一个稳定的系统。
4 结果分析
本节首先将设计的IMC与经过参数调校的PID控制的跟踪结果相比较,然后改变摩擦片摩擦因数,给出IMC的控制结果,以验证其鲁棒性。
4.1 IMC控制与PID控制比较
对比仿真中,DCT填充相与转矩相均采用相同的开环控制策略,转矩相结束时两次仿真的离合器转速差均为123 rad/s,惯性相时滑摩时间(tft0)设置为900 ms,按照式(15)设计参考输入,两种控制策略的参考输入相同。仿真中,模型的参数值见表1。PID控制器的参数经过反复调校。
仿真结果如图3所示,可见IMC控制器与PID控制器均能顺利实现离合器同步。两者的区别在于跟踪误差,如图3(d)所示,IMC控制器的最大跟踪误差为0.2 rad/s,而PID控制器的最大跟踪误差为4.5 rad/s。PID控制器误差较大的原因在于参考输入是一条变化的曲线,而不是固定值,固定增益的PID控制器不能很好适应参考输入的变化。而IMC控制器理论上通过逆控制器可以对任意变化的参考输入实现理想跟踪。
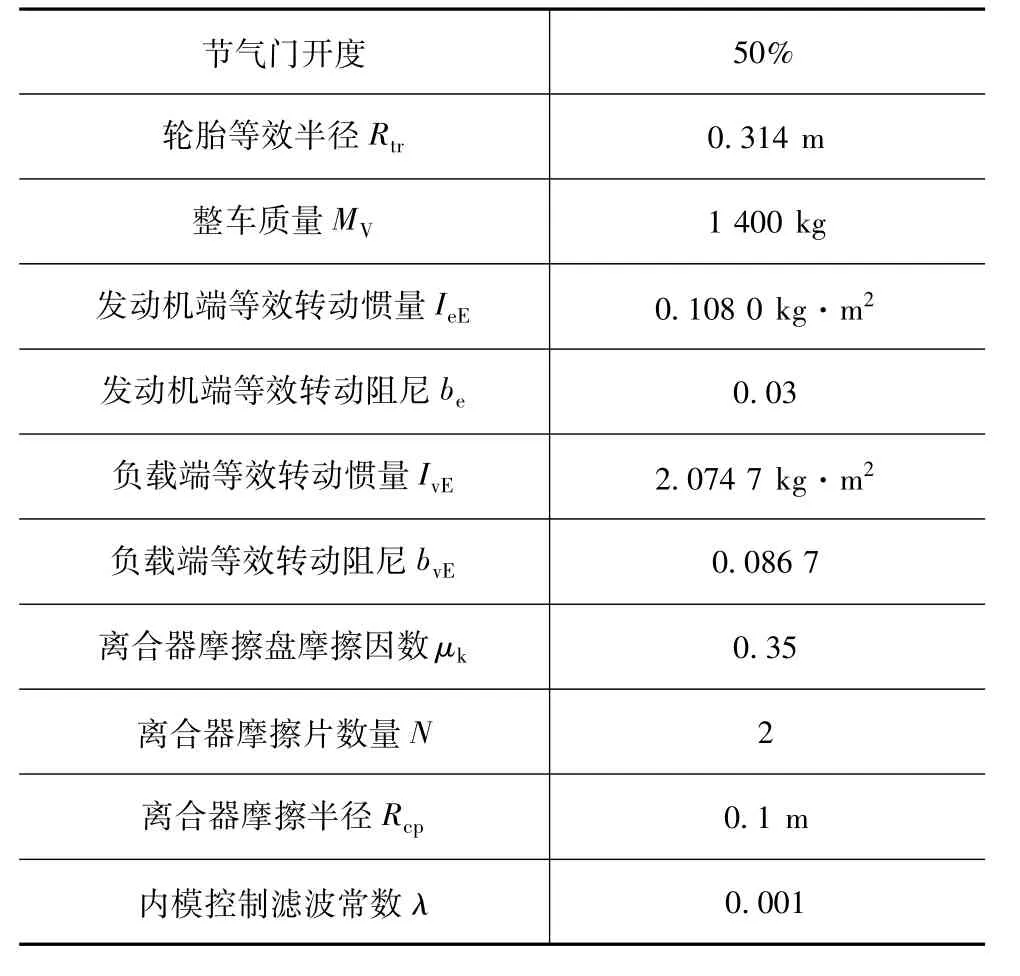
表1 仿真模型参数
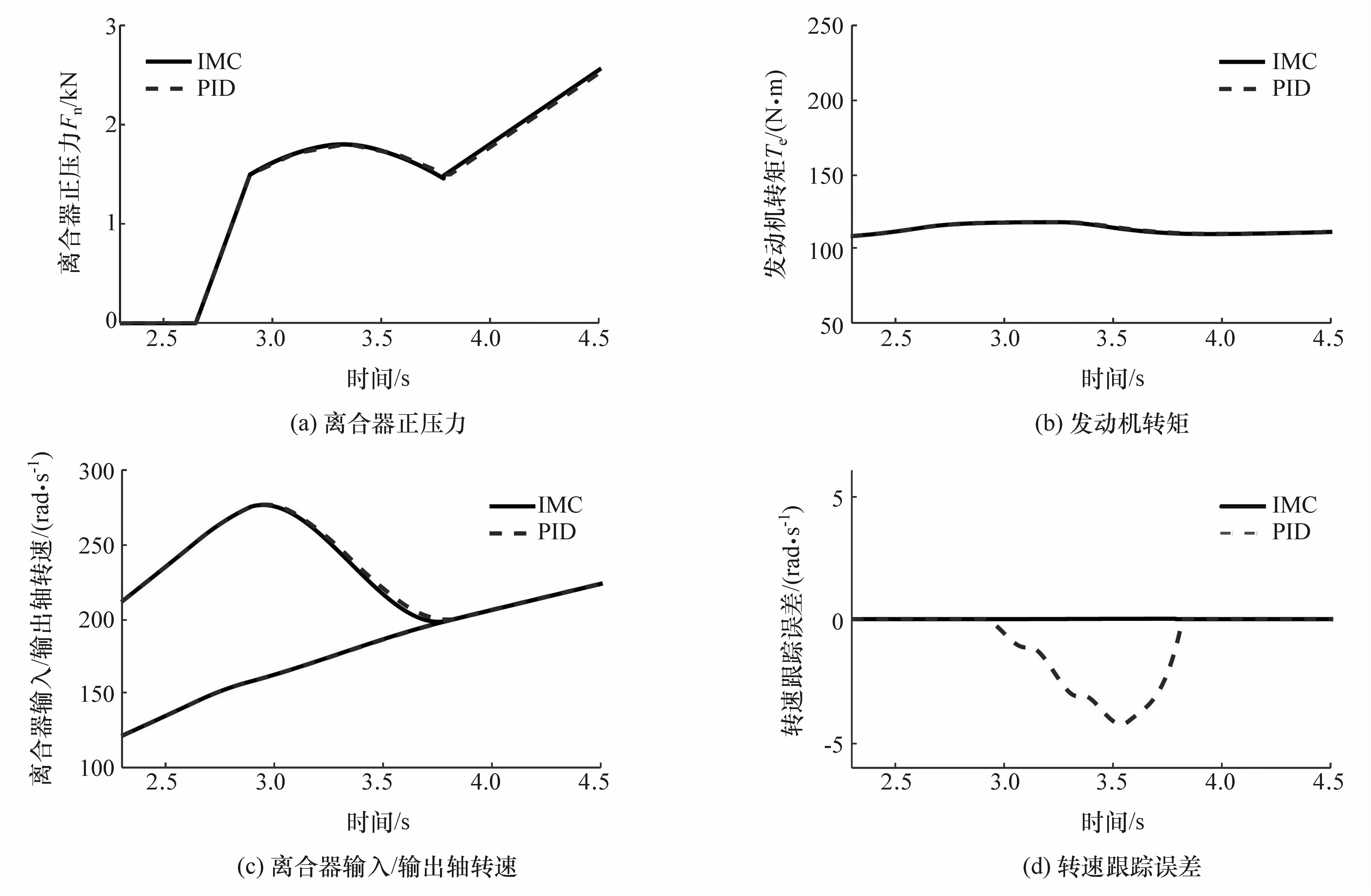
图3 IMC控制与PID控制结果对比
4.2 鲁棒性验证
离合器摩擦片的摩擦因数μ有可能由于磨损、老化、温度变化等因素发生改变,所以模型误差必然存在。图4给出4种实际摩擦因数的仿真结果。考虑固定增益PID控制无法较好适应工况的变化,本节仅给出IMC控制器的结果。IMC控制器按照名义模型中的摩擦因数值μ=0.35设计,从图4(d)可见,摩擦因数的变化引起的跟踪误差均小于1 rad/s。
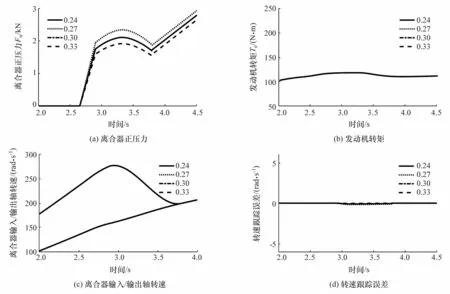
图4 不同离合器摩擦因数IMC控制结果比较
4.3 台架实验验证
本实验在传动台架上开展,台架参数如文献[15]和文献[37]中所述。首先设定滑摩时间为1 500 ms,发动机节气门开度为10%,参考输入的初始转速差θ0=45 rad/s。虽然由于轴系振动引起力矩波动,但是IMC控制的跟踪误差仍然较小,不超过1 rad/s,该工况下,调校PID控制器的跟踪误差也低于1 rad/s,实验结果见图5。改变参考输入曲线,滑摩时间由1 500减小至900 ms,实验结果如图6所示。IMC控制的转速跟踪误差仍然保持在1 rad/s,而 PID控制的跟踪误差达到2 rad/s。实验结果体现了IMC的跟踪精度高,且对参考输入变化具有鲁棒性。
5 结论
针对DCT换挡过程惯性相阶段的离合器结合过程,在经典IMC控制的基础上,本文中引入干扰补偿器与超前校正控制器设计IMC控制器,对控制系统的稳定性进行了分析。给出了不同滑摩时间、不同发动机输出转矩与不同离合器摩擦因数的仿真结果,并进行台架实验验证。结果表明,所设计的IMC控制器的转速跟踪精度高,对不同的参考输入、模型不准确、干扰变化等具有鲁棒性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
人民长江(2021年9期)2021-10-18
大众摄影(2018年6期)2018-06-19
电机与控制学报(2018年9期)2018-05-14
佛山陶瓷(2017年8期)2017-09-06
党的生活·党员电教与远程教育(2009年2期)2009-05-13
