基于端口特性的并联下垂逆变器系统的小信号建模与稳定性分析
2020-05-07 04:40:02王施珂刘进军
电源学报 2020年2期
王施珂,刘 增,刘进军
(西安交通大学电气工程学院,西安710049)
作为缓解能源危机的重要途经,新能源和分布式发电近年来得到了迅速发展。随着分布式电源接入电网比例的日益提高,微电网这一概念被提出,作为一个整体系统协调与控制互联的电源与负荷[1-2]。在孤岛交流微电网中,三相下垂控制的逆变器被广泛用作新能源和分布式电源接入电网的接口设备。基于有功功率-基波频率、无功功率-电压幅值的下垂原理,并联多台下垂逆变器可以实现不依赖通讯线的功率均分和自动同步[3-6]。
然而,即使并联下垂逆变器之间不存在控制信号的联通,它们之间的动态作用依然通过电气连接相互耦合,可能引发小信号稳定性问题,危害微网系统的运行[7]。针对这一问题,基于状态空间的研究方法在诸多现有文献中被深入讨论[8-10]。通过构建表征控制器和主电路动态的状态变量,首先建立单台逆变器的状态空间矩阵;进一步合并多个模块的状态空间矩阵,获得整体并联系统的状态空间矩阵,其特征根在复平面上的分布表征了系统的稳定性,如果有落在右半平面的特征根,说明并联系统不稳定。然而,基于状态空间的小信号建模方法,运算复杂度高,可扩展性差,并不适合多逆变器并联的大型网络的分析。如在文献[9-10]中,单台逆变器的状态空间矩阵包含13个状态变量,整体系统状态空间矩阵的阶数会随着并联模块个数的增加成倍增长,求解其特征根对计算机的运算能力是很大挑战。同时,每当网络结构或并联模块数发生变化时,系统的状态空间矩阵必须重新构建,建模工作量巨大。
考虑到状态空间方法的固有缺陷,基于端口特性的小信号建模方法成为分析交流电力电子系统稳定性的更优选择[11-13]。通过将整体系统划分为电源子系统和负载子系统,由它们端口阻抗和导纳传递函数乘积构成的回率矩阵,可以应用广义奈奎斯特判据 GNC(generalized Nyquist criterion)判断系统稳定性[14-15]。相比于高阶的状态空间矩阵,端口阻抗和导纳用以表征变流器的端口小信号动态特性,简化了建模和计算过程。同时,基于端口特性的小信号建模是模块化的,可以灵活适应网络结构调整或并联模块数变化的情况。因此,基于端口特性的小信号建模和稳定性分析方法在工程实际中具有更高的可行性和实用性。
针对并联下垂逆变器系统的小信号稳定性问题,本文建立了单台下垂逆变器的端口特性小信号模型,同时提出了并联系统稳定性判定方法。首先,基于下垂逆变器的控制原理和主电路结构,推导和构建了其端口特性小信号模型,除传统的输出阻抗和输入导纳之外,提出了一种新型端口特性以表征由下垂控制引入的基波频率动态;其次,基于单个模块的端口特性模型,构建了多台逆变器并联系统的小信号模型,并推导回率矩阵,应用GNC判断系统稳定性;最后,给出了基于3台逆变器并联硬件平台的实验结果。
1 下垂逆变器的端口特性小信号建模
1.1 下垂控制三相逆变器的基本结构
下垂控制三相逆变器的主电路和控制基本结构如图1所示。在主电路中,由额外的控制策略保证直流侧电压Vdc恒定;在交流侧,三相逆变器的输出电压 Viabc经过 LC滤波器,Lf、Cf滤除开关次谐波,再经由等效电阻为RC和等效电感为LC的配电线,连接至公共连接点PCC(point of common coupling)。如图1所示,下垂逆变器的控制结构分为外部功率下垂控制环和内部电压电流控制环,功率外环实现了有功功率-基波频率、无功功率-电压幅值的下垂控制。在功率计算模块,dq坐标系下逆变器输出的瞬时有功功率p和瞬时无功功率q可分别表示为
式中:vCd和vCq分别为d轴和q轴逆变器输出电容电压;iod和ioq分别为d轴和q轴逆变器输出电流。
一阶低通滤波器被用于提取逆变器输出功率的平均值,即
式中:pLPF和qLPF分别为逆变器输出的有功和无功功率的平均值;GLPF为一阶低通滤波器传递函数;ωf为滤波器的截止频率。
逆变器输出端电压的基波频率和幅值的参考值,随输出有功和无功功率按照下垂关系变化,即
式中:mp和 nq分别为有功和无功下垂斜率,mp,nq>0;P0和Q0分别为有功和无功功率的设定基值;ω0和V0分别为基波频率和电压幅值的额定值。
单台下垂逆变器的端口特性小信号模型,应包含内、外层控制环路和主电路元件的全部动态特性。下文依次对电压电流控制双闭环、功率下垂控制外环、LC滤波器以及配电线等效阻抗进行小信号建模,最终合并推导出整体端口特性的传递函数表达式。
1.2 电压电流控制双闭环的小信号建模
如图1所示,逆变器自身的控制是在同步参考坐标系SRF(synchronous reference frame)下实现的,此SRF的角速度为式(3)生成的基波频率ωc。在建模过程中,采用上标c表示在逆变器自身控制坐标系下的dq分量。
基于图1,构建电容电压和电感电流控制双环的小信号模型,如图2所示。其中,GV表示电容电压控制器,为比例积分PI(proportion integration)调节器;GIL表示电感电流控制器,往往采用比例P(proportion)调节器;GPWM表示PWM调制过程的传递函数,因为不考虑直流侧电压的动态,GPWM只包含稳态直流电压Vdc。传递函数表达式为
式中:kpv,kiv分别为电压控制器的比例系数和积分系数;kpc为电流控制器的比例系数。
基于基尔霍夫电路定律,在图1中,三相半桥的输出电压 viabc、电容电压 vCabc、电感电流 iLabc、电容电流iCabc和端口输出电流ioabc之间的表达式可推导为
式中,rLf为滤波电感Lf的串连等效电阻。通常被用作滤波电容Cf的都是薄膜电容,其串连等效电阻非常小,可以被忽略。
将式(5)和式(6)中的变量变换到 dq坐标系下,并做小信号线性化,可得
式中:Ωc为基波频率ωc在某一稳态工作点的取值;和为稳态电感电流值;和为稳态电容电压值。所有这些稳态工作点的dq分量取值,均表示在逆变器自身控制坐标系下。
1.3 功率控制外环的小信号建模
功率控制外环根据下垂原理,实现了并联情况下,各个逆变器之间的功率均分和自动同步。对式(1)~式(3)进行小信号线性化,功率外环的小信号模型如图3所示。传递函数可表示为
1.4 电压和电流模式的端口特性模型
基于图3中的功率外环模型和式(9)中的电压电流内环传递函数,电容电压和输出电流之间的小信号传递函数可以推导为
式中,K= (I-T1GvvC-T2Gωvc)-1(T1Gvio+T2Gωio+T3)。
矩阵传递函数K可以视为单台下垂逆变器的端口阻抗,不包含配电线阻抗在内,表征从输出电流扰动到逆变器输出端电容电压响应之间的小信号动态。在多台逆变器并联情况下,如图4所示,逆变器输出端,必须经过一段配电线才能连接到PCC点。通过此配电线阻抗,每个单台逆变器可以调整其输出端电容电压的幅值和基波频率,进而实现并联模块之间的功率均分和频率同步。因此,除传递函数K之外,完整的端口特性模型,也应将配电线阻抗的动态特性包括进来。
N台并联下垂逆变器系统如图4所示,本文只关注下垂逆变器的端口特性,外接负载的动态不予考虑,拟定为理想电流负载。前2节中,所有小信号模型中涉及的dq分量均是在单台逆变器内部控制SRF下推导的。在图4所示的N台并联下垂逆变器系统中,每台逆变器都依据下垂原理生成自身的基波频率,因此,各台逆变器的 SRF 旋转角速度互不相同。为了后续构建整个并联系统的小信号模型并分析稳定性,所有电路变量必须转换到统一的参考SRF下,假设这一参考SRF的旋转角速度为ωs。如图5所示,各台逆变器自身SRF和参考SRF之间的旋转角度差可定义为
式中,δ0为不同SRF之间角度差的稳态值。
在参考SRF下表示的dq分量采用上标 s标识。在自身SRF和参考SRF下,逆变器输出电容电压和输出电流的dq分量的相互变换关系可表示为
为便于计算参考SRF和各台逆变器SRF之间的稳态角度差,将图4所示并联系统中的第1台逆变器SRF作为参考SRF[7-8]。考虑到各台并联下垂逆变器的地位是对等的,系统中任意1台逆变器都可以被选为参考,对并联系统稳定性的判定是等效的。
对于逆变器1,其由下垂关系生成的基波频率就是参考SRF旋转的角速度,ωs=。 根据式(13),角度差的小信号动态不再存在,=0。同时,其自身SRF即参考SRF,稳态角度差也为0,δ01=0。基于(15),电路dq分量在逆变器SRF和参考SRF下表示始终相同,。此时,对于逆变器1,式(12)可直接变换到参考 SRF下,即
对于逆变器2~N,参考SRF的旋转频率ωs不等于逆变器自身的基波频率,…,N。 基于式(11)~式(13)和式(15),参考 SRF 下,电容电压和输出电流dq分量的小信号传递函数可以推导为
前文提到,完整的逆变器端口特性小信号模型应包含配电线阻抗的动态。在图1中,基于基尔霍夫电路定律,逆变器输出电容电压vCabc、输出电流ioabc和PCC电压voabc之间的表达式可推导为
将式(18)在参考SRF下表征并做小信号线性化可得
式中,Ωs为参考频率ωs的稳态工作点取值。
如前所述,参考频率ωs选取逆变器1自身基波频率,其小信号动态与逆变器1的功率外环下垂控制相关。 根据图 3 和式(11),可得的表达式为
基于式(16)、式(19)和式(21),逆变器 1 的输出阻抗Zodq1传递函数可推导为
基于式(17)和式(19),Yodqk和 Giωk的传递函数表达式可推导为
2 并联下垂逆变器系统的小信号建模和稳定性判据
对于孤岛状态下的并联逆变器系统而言,其主要作用是支撑PCC电压和频率,保证为负载供电。由于每台逆变器都依据下垂原理进行控制,当总输出功率,或者说总输出电流变化时,PCC电压和基波频率也会变化。总输出电流由外接负载决定,视为整体并联系统的外部输入扰动;PCC电压幅值和基波频率为输出响应。因此,可以采用类似单台下垂逆变器的电压模式端口特性小信号模型来表征整体并联系统,如图8所示。
在获取单台逆变器的端口特性模型式(21)~式(23)的基础上,可以构建如图9所示N台并联下垂逆变器系统的小信号模型,并进一步推导出回率矩阵和稳定性判据的形式。
如前文所述,N台并联下垂逆变器被分成2组。逆变器1单独为第1组,其端口特性小信号模型采用电压模式描述,定义PCC电压幅值和参考频率;逆变器 2~N 为第2组,端口特性小信号模型均采用电流模式描述,总输出电流由外接负载决定,其值也同时等于N台逆变器输出电流之和。通过将N台并联下垂逆变器划分为2组,并采用电压和电流模式分别建模,不仅构建出逆变器之间电压和输出电流的相互作用回路,与基波频率有关的相互作用回路也同时被构建出来。
基于图8和图9,可以推导出总端口特性ZSodq和GSωi与各个单台端口特性之间的关系为
式中,I为二阶单位矩阵。
基于式(24),图9可等效变换为图10。总端口特性ZSodq和GSωi等效为1个负反馈闭环和逆变器1电压模式端口特性的串联。由于并联系统的总输出电流方向为流出,前也需加负号。分析并联系统稳定性的前提是每个单台逆变器自身独立运行时稳定, 即单个端口特性 Zodq1,Gωi1, 以及Yodqk,Giωk,k=2,3,…,N,不包含右半平面的极点。因此,根据图10,总端口特性ZSodq和GSωi是否包含右半平面的极点,即并联系统是否稳定,仅与负反馈闭环相关。根据GNC[14-15],系统回率矩阵L可定义为
总端口特性ZSodq和GSωi的右半平面的极点个数为
式中,NL为回率矩阵L的特征轨迹在复平面上环绕(-1+j0)点的次数。由此可得,系统稳定的充分必要条件为回率矩阵L的特征轨迹在复平面上不环绕(-1+j0)点。
基于第1节提出的单台下垂逆变器端口特性的小信号模型,首先计算出并联系统中每台单个逆变器的端口特性表达式;其次,将单个逆变器的小信号端口特性代入式(25),计算绘制特征轨迹,观察其在复平面上是否环绕(-1+j0)点,即可判定并联系统的稳定性。
3 并联系统稳定性分析算例
以3台下垂逆变器组成的并联系统作为算例,验证第1节所提端口特性模型和第2节所提稳定性判据的有效性。每台下垂逆变器的控制和主电路参数相同,如表1所示。负载总功率3 000 W,每台逆变器的稳态输出有功功率1 000 W,输出无功功率0 Var。
现有文献研究表明,并联下垂逆变器系统的稳定性对有功下垂斜率mp这一参数变化十分敏感,mp增加,易导致并联系统不稳定[8-10]。以mp这一关键参数变化对并联系统稳定性的影响作为算例,对端口特性小信号模型和稳定性判据加以论证。在mp=1×10-5、5×10-5和 1×10-4rad/(s·W)3 组工况下,依据第2节,对第1台逆变器采用电压模式建模,第2、3台采用电流模式建模,得到单台逆变器小信号端口特性传递函数在0.1~10 000 Hz的伯德图如图11和图12所示。
将 Zodq1,Gωi1,Yodqk,Giωk(k=2,3)代 入 式 (25),得到回率矩阵L并计算绘制特征轨迹,如图13所示。
在工况1和工况2中,回率矩阵特征轨迹在复平面上不环绕(-1+j0)点,根据所提稳定性判据,并联系统稳定运行;在工况3中,(-1+j0)点被回率矩阵的特征轨迹环绕,预测并联系统不稳定。根据参考文献[16-17],应用广义奈奎斯特判据判定系统的稳定性,当系统不稳定时,回率矩阵特征轨迹与负实轴的交点位置所对应的频率与系统右半平面闭环极点的虚部所对应的频率值,即实际系统振荡的频率很接近,可以采用这个交点所对应的频率,近似预测不稳定系统振荡的频率。如图13(c)所示,特征轨迹l1与负实轴的交点所对应的频率约为1.1 Hz,说明系统不稳定时,电压电流dq分量振荡的频率约为1.1 Hz。考虑到小信号模型是在旋转速度为50 Hz的同步旋转坐标系下建立的,则三相交流电压电流振荡的频率约为50+1.1=51.1 Hz和50-1.1=48.9 Hz[18-19]。
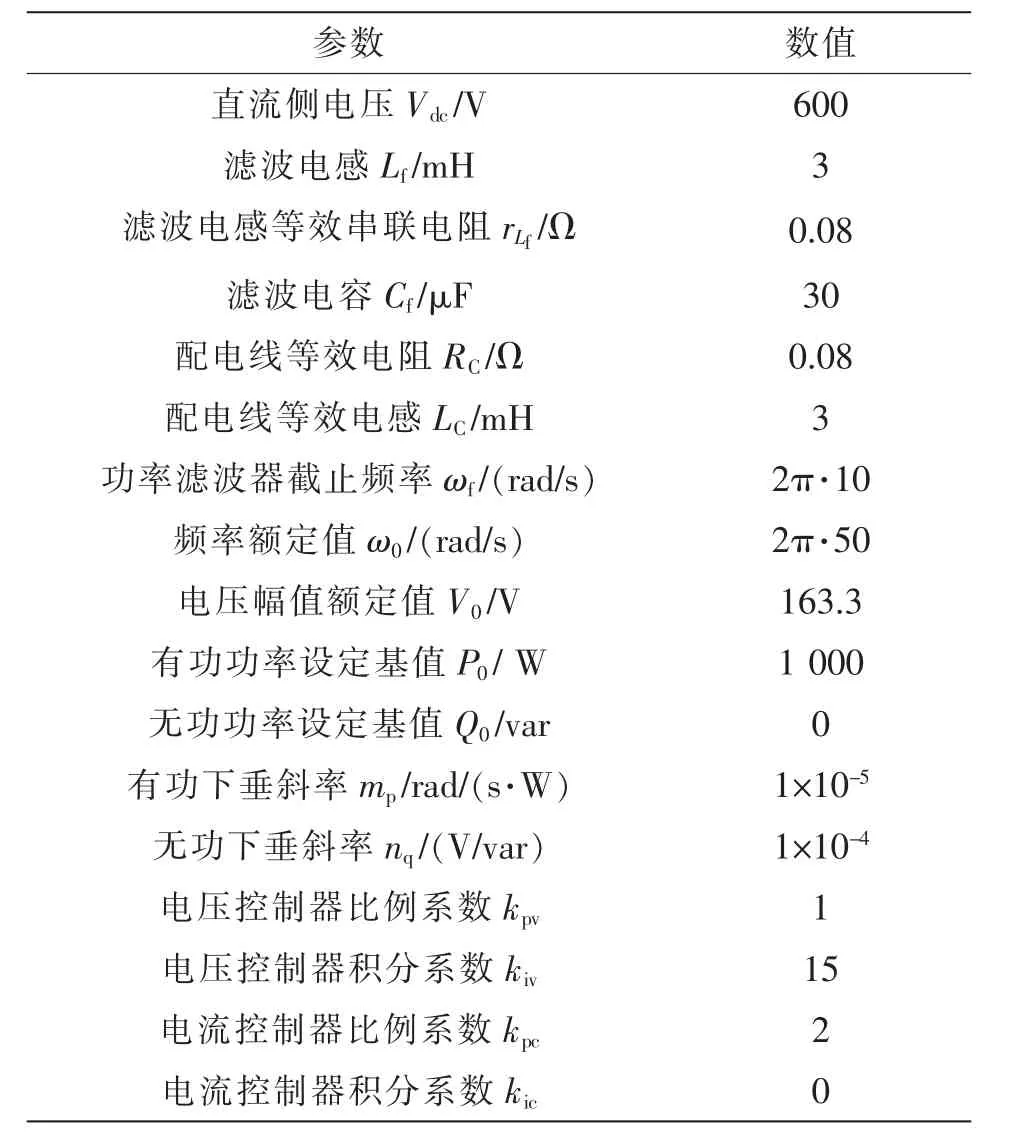
表1 下垂逆变器的主电路和控制参数Tab.1 Power stage and control parameters of droopcontrolled inverter
4 实验验证
并联逆变器实验平台如图14所示,由4台三相逆变器、电子负载和电网模拟器组成,可以模拟微电网孤岛和并网条件下的各种工况。实验平台中,单台逆变器的参数与表1完全一致。此实验采用了逆变器1~3,由电子负载模拟理想电流负载。
当 mp1=mp2=mp3=1×10-5rad/(s·W)和 mp1=mp2=mp3=5×10-5rad/(s·W)时,3 台下垂逆变器并联运行的波形如图15所示,由图15可以看出,并联系统在工况1和工况2都能稳定运行,与稳定性判据的预测结果一致;当 mp1=mp2=mp3=1×10-4rad/(s·W)时,实验波形如图16所示,可见PCC电压和3台逆变器的输出电流都发生了振荡,系统不稳定。将示波器记录的波形数据送入Matlab软件进行FFT分析,结果如图17所示。PCC电压和3台逆变器的输出电流均在51.1 Hz和48.9 Hz 2个频率点处有明显的谐波分量,与图13(c)的预测结果一致,进一步证明了逆变器端口特性小信号模型和稳定性判据的准确性。
5 结语
针对下垂逆变器系统的稳定性问题,本文建立了单台下垂逆变器和多台并联系统的小信号模型。针对单台逆变器,通过推导其控制环路以及主电路的小信号方程,构建了输出阻抗和输入导纳的小信号传递函数,与此同时,还提出了一种新型小信号端口特性模型来描述基波频率动态;基于单台逆变器的端口特性,构建了多台逆变器并联系统的小信号模型,并推导出由阻抗导纳乘积与基波频率端口特性乘积之和组成的回率矩阵。应用广义奈奎斯特稳定性判据,计算回率矩阵的特征根轨迹,可以对并联下垂逆变器系统的稳定性做出准确判断。相比于传统基于状态空间的小信号建模与稳定性分析方法,本文所提基于端口特性的方法,无需计算高阶状态空间矩阵的特征根,具有运算量小、可模块化拓展及可行性高的优势,为交流微电网中下垂逆变器系统的小信号建模和稳定性分析方面的研究提供了理论依据。
猜你喜欢
现代经济信息(2022年35期)2023-01-11 02:41:18
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
测控技术(2018年9期)2018-11-25 07:44:40
新能源汽车报(2018年47期)2018-05-14 14:06:16
水利规划与设计(2017年5期)2017-06-09 08:56:41
中国环境监察(2016年7期)2016-10-23 05:36:30
电测与仪表(2016年5期)2016-04-22 01:13:44
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年14期)2016-04-11 12:32:40