
基于CATIA的商用车转向操纵系统校核优化
2020-05-06 09:09宋鹏成王印孟令建李彦鹏
汽车实用技术 2020年6期
宋鹏成 王印 孟令建 李彦鹏

摘 要:文章通过硬点、骨架模型的理念,简化转向系统运动部件,并运用CATIA软件的DMU模块建立了运动仿真模型。校核系统性能的同时可兼顾力矩波动优化。该方法可处理商用车转向系统设计过程中大量的复杂验证工作,缩短设计周期,降低研发验证投入。
关键词:骨架模型;转向操纵系统;运动机构;力矩波动
中图分类号:U463.4 文献标识码:B 文章编号:1671-7988(2020)06-87-03
Abstract: In this paper, the concept of point and skeleton model is used to simplify the moving parts of steering system, and the DMU module of CATIA software is used to build the simulation motion model. While checking the performance of system, the torque fluctuation optimization can be taken into account. This method can deal with a lot of complicated verification work in the design process of commercial vehicle steering system, shorten the design cycle and reduce the investment in research and development.
Keywords: Skeleton model; Steering control system; DMU; Torque fluctuation
CLC NO.: U463.4 Document Code: B Article ID: 1671-7988(2020)06-87-03
前言
汽車转向操纵系统是驾驶员控制车辆方向的运动机构。在转向操纵系统设计时,须在满足自身性能的同时,兼顾周边零部件的布置需求。转向操纵系统涉及零部件繁多,需要往复校核,是一项往复繁重的工作。CATIA软件建模环境集成度高、兼容性较好。可视化环境也优于其他的建模仿真软件。本文通过硬点及骨架建模思想,并运用CATIA中“DMU运动机构”模块,实现转向操纵系统运动仿真分析及方案优化。
1 骨架模型建立
1.1 硬点选取
转向操纵系统关键硬点主要有转向盘中心P0,两个十字轴万向节点P1、P2,转向器输入轴的硬点P3,驾驶室前悬置点P4、P5,转向管柱调节中心P6,转向盘中心点由人机工程获得,其余各点位可根据初步模型结构进行布置。
1.2 系统主骨架建立
转向操纵系统运动仿真时主要部件包括:转向盘、转向柱管、转向传动轴、十字轴万向节、转向器输入轴、驾驶室、驾驶室前悬置等。其骨架制作时,遵循以下规则:
(1)系统骨架线通过不同的“几何图形集”放在一个“part”文件中,便于后期运动骨架调用。
(2)主骨架建模时根据实体部件的结构特点,在硬点基础上建立。
(3)建立骨架时,需考虑运动仿真时,骨架与实体部件的修饰装配。需要在骨架上添加一些点、线、面。
2 运动机构仿真
2.1 运动机构建立
建立运动部件时需遵循以下规则:
(1)根据驾驶室,车架与转向操纵系统各部件之间的运动关系来划分。
(2)DMU运动部件骨架需从建立完成主骨架模型上,通过“复制”+“选择性粘贴”的形式调用生成。
(3)根据运动结构来划分运动部件骨架。运动骨架一致的,可在主骨架上重复调用。
(4)建立运动部件时,根据驾驶室、车架与转向操纵系统各部件之间的运动关系,添加运动副及驱动列表。如表1所示。
(5)运动副和驱动添加完成后,其机构自由度应为0。完成后机构可以模拟运动。
2.2 运动修饰
根据仿真分析的运动件需求,将相关装配模型调入以上建立的DMU运动模型中,通过CATIA“DMU运动机构”命令栏中“机械装置修饰”命令将装配模型中的各零部件与DMU运动模型中的运动部件进行关联。修饰完成后,即可进行转向操纵系统的运动空间分析,如图2所示。
3 仿真校核
3.1 空间分析及性能参数获取
使用测量检查在系统零部件在工况下运动间隙,用“测量”测出运动部件间的间隙,并保持测量。打开“运动模拟”在面板上打开“传感器”,对转向操纵系统进行工况模拟,将各部分间隙数参数输出,如地板孔与伸缩轴间隙、管柱与仪表板之间的相对空间等,检验设计是否满足标准。
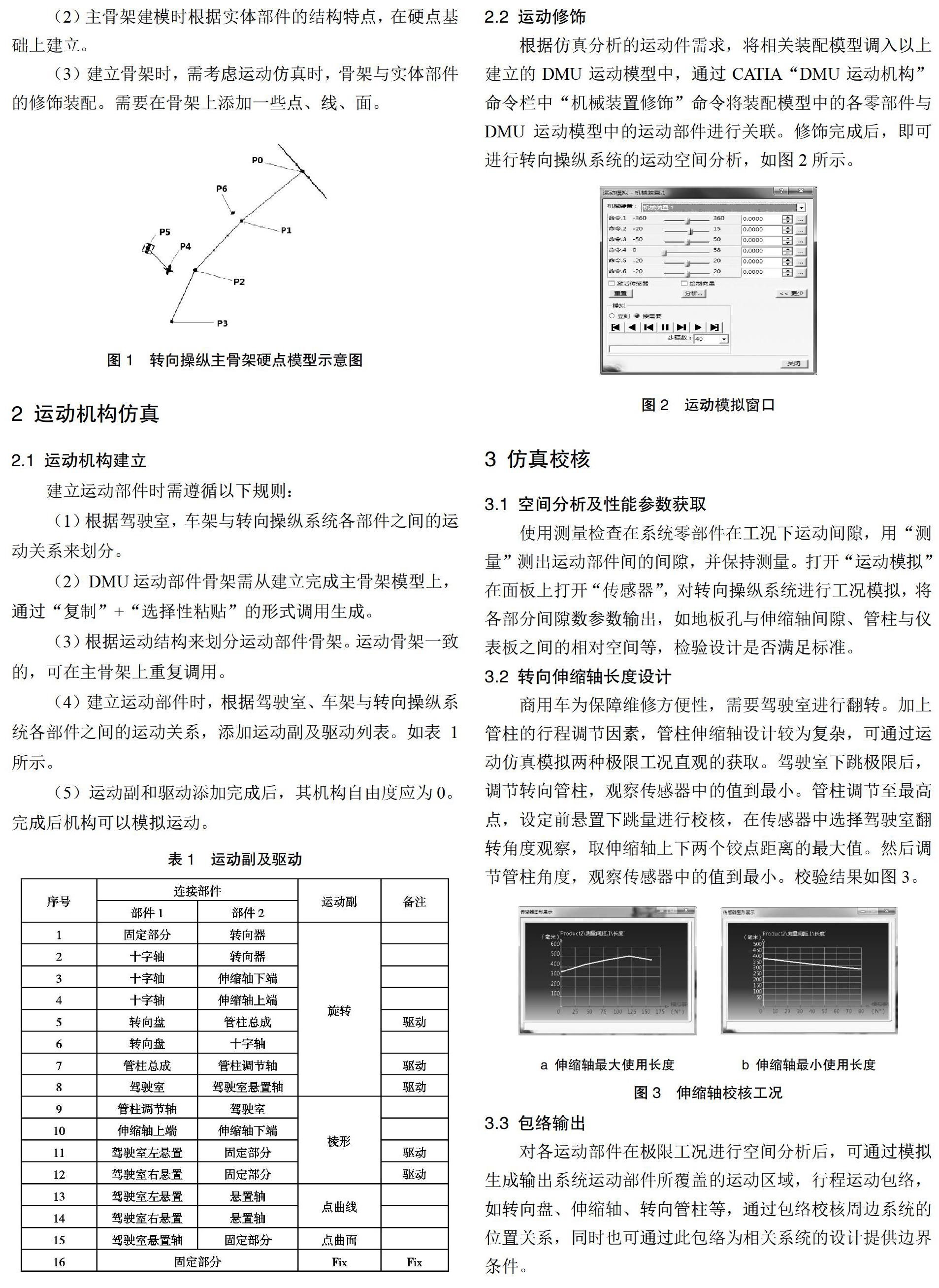
3.2 转向伸缩轴长度设计
商用车为保障维修方便性,需要驾驶室进行翻转。加上管柱的行程调节因素,管柱伸缩轴设计较为复杂,可通过运动仿真模拟两种极限工况直观的获取。驾驶室下跳极限后,调节转向管柱,观察传感器中的值到最小。管柱调节至最高点,设定前悬置下跳量进行校核,在传感器中选择驾驶室翻转角度观察,取伸缩轴上下两个铰点距离的最大值。然后调节管柱角度,观察传感器中的值到最小。校验结果如图3。
3.3 包络输出
对各运动部件在极限工况进行空间分析后,可通过模拟生成输出系统运动部件所覆盖的运动区域,行程运动包络,如转向盘、伸缩轴、转向管柱等,通过包络校核周边系统的位置关系,同时也可通过此包络为相关系统的设计提供边界条件。
4 力矩波动分析优化
由于转向操纵系统的布置角度造成万向节的不等速性而产生力矩波动,对于三段式的空间双十字轴万向节结构,可通过等效夹角的概念化为单十字轴的万向节。等效夹角为:
为得到较好的方向盘手感,行业对于力矩波动δ≤5%,从公式1可以发现,β1,β2、Ψ、α 是影响等效夹角的因素。为达到较好的传动性能,需要等效夹角βe尽可能小,因此可从两个方向对力矩波动进行优化:
(1)对于输入轴中心线、中间轴中心线及输出轴中心线的布置,要求β1,β2差值尽量小;
(2)使|Ψ+α|尽量趋向于180°,相位角尽量减小。
运用以上两个优化理念,在运动空间允许的范围内,对主骨架上十字轴硬点进行调整,使β1,β2角度差值尽量减小,同时调整两十字轴之间的相位角,然后在运动模型中进行更新同步硬点后,对系统进行仿真验证。对比数据如表2:
对比优化前后数据,通过硬点调整使β1,β2角度差值以及两十字轴之间的相位角减小,最终达到力矩波动δ≤5%优化目的。
5 结术语
本文以转向操纵系统硬点为基础,制作运动骨架。结合DMU运动机构校核结构件与周边系统部件的运动间隙,简化了边界校核、零部件设计和波动优化的过程,解决了商用车转向操纵系统设计过程中的大部分复杂验证工作。同时包络输出也可为其他系统设计提供参照。
参考文献
[1] 曹砚奎.CATIA 从草图到运动仿真[M]化学工业出版社.
[2] 田耀霁,金智林,王超,陈春华.转向系统的力矩波动与优化[J]轻型汽车技术2017(1-2).
[3] 王春梅.双十字轴万向节转向系统力矩波动的优化设计[J]汽车实用技术.
[4] 汪威.CATIA DMU模块在商用车转向系统设计中的应用[J]重型汽车.
[5] 曾志.基于CATIA的汽车转向系统硬点设计与优化[J]客车技术与研究(2015.2).
