
基于时间序列的目标车辆轨迹预测算法
2020-05-06 09:09孙影王铁
汽车实用技术 2020年6期
孙影 王铁

摘 要:针对高速道路场景,对智能车辆前方的目标车辆进行轨迹预测。根据车辆运动轨迹数据具有时序性的特点,并为了增加轨迹特征的表征能力和上下文时空关联性,提出了将车道线特征、目标车辆的特征与历史轨迹数据的特征进行融合,和LSTM-CNN-LSTM融合模型,以提高目标车辆轨迹预测的精度。
关键词:智能车辆;轨迹预测;LSTM;CNN
中图分类号:TP183 文献标识码:B 文章编号:1671-7988(2020)06-31-03
Abstract: In this paper, aiming at the high-speed road scene, the trajectory of the target vehicle in front of the intelligent vehicle is predicted. According to the temporal characteristics of vehicle motion track data, and in order to increase the representation ability of track characteristics and context spatiotemporal correlation, this paper proposes to integrate lane line characteristics, target vehicle characteristics and historical track data characteristics, and the lstm-cnn-lstm fusion model, in order to improve the accuracy of target vehicle trajectory prediction.
Keywords: Intelligent vehicle; Trajectory prediction; LSTM; CNN
CLC NO.: TP183 Document Code: B Article ID: 1671-7988(2020)06-31-03
引言
动态路径规划是智能车辆研究的关键任务之一,它的难点在于实际道路交通环境的复杂性,并且周边车辆目标驾驶员的驾驶意图随时可能发生变化,因此通过实时预测目标车辆的轨迹,使本车及时调整新的路径、避免交通事故的发生。
目前车辆运动轨迹预测的研究主要有两类方法,一种是基于模型的轨迹预测方法,另一种是基于数据驱动的轨迹预测方法[1]。由于基于模型的轨迹预测方法大多依赖对车辆目标运动参数的估计和建模,忽略了驾驶员个性化和环境多样性的影响,具有较大的试验误差。而基于数据驱动的轨迹预测方法可以挖掘出驾驶员驾驶的行为习惯、驾驶环境等潜在因素,受到广大国内外研究学者们的青睐。同时近年来深度学习方法深度的特征表征和泛化能力在图像领域已经超越了人类水平。在这样的背景下,本文提出了一种深度卷积神经网络和时间序列模型来实现前方目标车辆在未来一段时间的轨迹预测,为本车的路径规划提供参考。
1 主要问题分析
传统的车辆轨迹预测的实时性、准确性较差,难以满足现有的智能车辆需求。随着计算机视觉的发展,本文提出了一种基于视觉的车辆轨迹预测方法,该方法首先通过视觉的方式检测到目标车辆,进而可以获得目标车辆历史一段时间内的位置信息,通过融合历史特征和当前特征,采取视觉深度学习方法对潜在的有效特征进行学习,例如驾驶员的驾驶行为习惯、环境因素等,可以更丰富、更多样化、更准确的进行车辆轨迹预测。
2 模型介绍
2.1 LSTM网络架构
2.2 特征融合
当前特征:当前特征包含目标车辆检测框的坐标信息和车道线的坐标信息,分别从视觉车辆和车道线检测算法获取,这部分信息包含了待预测目标的图像坐标位置和车道位置,蕴含道路環境和目标车辆位置的变化。
历史特征:目标车辆的历史轨迹信息,包含历史时间步长t的目标车辆轨迹信息序列,同时历史时间步长决定了能够预测多长时间步的目标轨迹,这部分信息是先验信息,由传感器获取,蕴含了驾驶员的驾驶行为特征信息。
参考word2vec[3]思想,为了更好地将稀疏高维的当前特征和历史特征有机的结合在一起,提出了特征融合的方法。
当前特征和历史特征经过归一化预处理之后,统一按照时间步长输入到特征嵌入层,将高维的特征向量映射成低维稠密的特征向量,从而为LSTM时间序列模型提供包含更多语义信息的输入特征。
2.3 轨迹预测模型
为了增加轨迹特征的表征能力和上下文时空相关性,本文在LSTM模型的基础上,介绍了两种常用的时间序列预测模型:多层LSTM[4]和CNN-LSTM[5]模型。同时基于上述两种常用模型,提出了LSTM-CNN-LSTM融合模型,以提高目标车辆轨迹预测的精度。
多层LSTM指的是由2层及以上的LSTM单元构成的网络,通常为了增加网络的深度非线性特征提取能力。
CNN模型对局部特征的空间关联较敏感,对LSTM的时间上下文是一个补充特征,CNN-LSTM模型由CNN作为融合特征的输入层,LSTM接受CNN层输出的特征。
但是,CNN作为时间序列的特征输入层,不利于提取目标车辆轨迹的时间相关性,为了进一步融合LSTM和CNN对时间、空间特征表达的优点,提高模型的泛化能力,本文提出LSTM-CNN-LSTM模型。
车辆目标的生命周期分为新车辆目标出现、已有车辆目标的消失和能够匹配的车辆目标,本文通过对重叠度选择合适的阈值判定相邻2帧之间目标车辆的相关性,假如阈值大于thresh,则认为该车辆目标是同一个车辆目标,否则为新出现的车辆目标,从而实现相同车辆目标轨迹匹配的目标,其中经验参数thresh需要通过试验确定。
3 实验结果分析
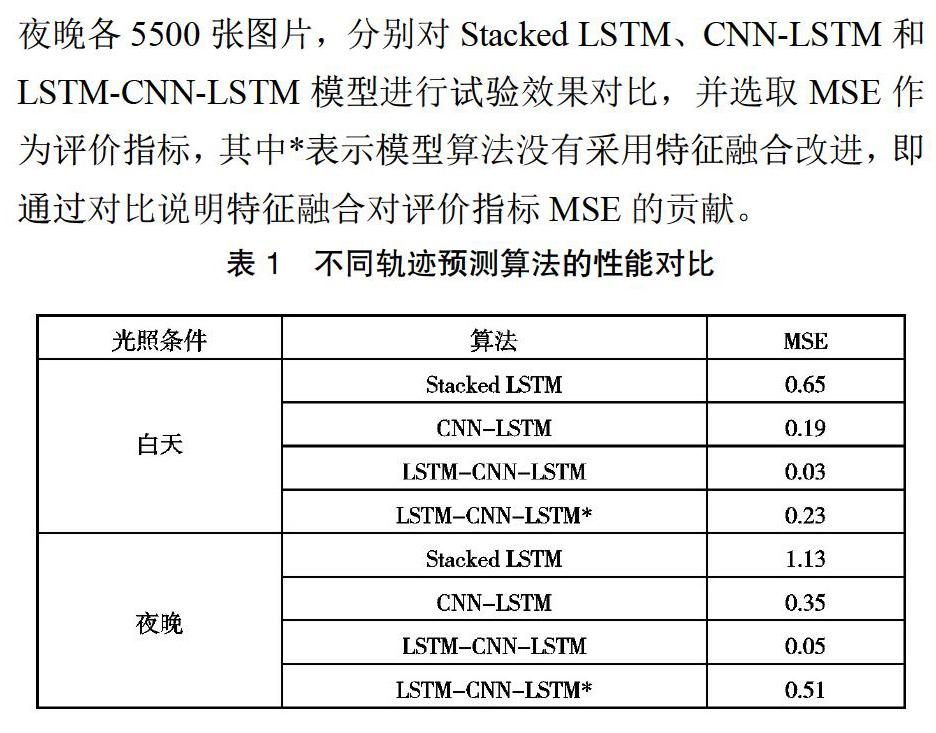
在保证试验数据集和训练策略一致的基础上,本节对不同的目標车辆轨迹预测算法的性能通过测试集进行试验评估,自制测试集共包括11000张视频帧图片。
如表1所示,将测试集按照光照条件的不同分成白天和夜晚各5500张图片,分别对Stacked LSTM、CNN-LSTM和LSTM-CNN-LSTM模型进行试验效果对比,并选取MSE作为评价指标,其中*表示模型算法没有采用特征融合改进,即通过对比说明特征融合对评价指标MSE的贡献。
4 分析结论
由表1可知,本文提出的LSTM-CNN-LSTM模型的MSE明显比Stacked LSTM、CNN-LSTM模型低,平均MSE为0.04;且相同模型在光照条件较好时的MSE明显比光照较差时低,模型的泛化效果更好;另外当没有特征融合时,LSTM- CNN-LSTM模型的MSE明显低于带有特征融合的LSTM- CNN-LSTM模型,试验分析主要的原因是嵌入向量比稀疏向量包含更有效的深度特征表示,对目标车辆轨迹预测有益。
参考文献
[1] 季学武,费聪,何祥坤,等.基于LSTM网络的驾驶意图识别及车辆轨迹预测[J].中国公路学报, 2019, 32(6): 34-42.
[2] Greff K, Srivastava R K, Koutník J, et al. LSTM: A search space odyssey[J]. IEEE transactions on neural networks and learning systems, 2016, 28(10): 2222-2232.
[3] Goldberg Y, Levy O. word2vec Explained: deriving Mikolov et al.'s negative-sampling word-embedding method[J].arXiv preprint arXiv: 1402.3722, 2014.
[4] Li J, Mohamed A, Zweig G, et al. Exploring multidimensional LSTMs for large vocabulary ASR[C]//2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE, 2016: 4940-4944.
[5] Vosoughi S, Vijayaraghavan P, Roy D. Tweet2vec: Learning tweet embeddings using character-level cnn-lstm encoder-decoder[C]// Proceedings of the 39th International ACM SIGIR conference on Research and Development in Information Retrieval. ACM, 2016: 1041-1044.
