
电动赛车半主动悬架系统仿真及实现
2020-05-06 09:09潘军号赵海军李一凡姜蕴珊徐征王志强
汽车实用技术 2020年6期
潘军号 赵海军 李一凡 姜蕴珊 徐征 王志强


摘 要:应用汽车动力学理论,以1/4汽车悬架模型为研究对象,用调节减振器的阻尼系数法,建立了二自由度电动赛车的半主动悬架最优控制模型,利用编制的路面谱作为激励输入进行了仿真,并与被动悬架性能进行了对比。结果表明,半主动悬架在车身垂直振动加速度、悬架动行程、轮胎形变量的改善度分别为31.3%、21.4%、12.6%,使车身的振动被控制在某个范围之内,大大提高电动赛车在行驶过程中的平顺性。
关键词:半主动悬架;电动赛车;最优控制;平顺性
中图分类号:U469.7 文献标识码:B 文章编号:1671-7988(2020)06-24-04
Abstract: An optimal control model for semi-active suspension of a two-degree-of-freedom electric racing car is established by applying the theory of automobile dynamics, taking 1/4 car suspension model as the research object, and using the damping coefficient method of adjusting the shock absorber. Simulations were performed as stimulus inputs and compared with passive suspension performance. Results show that the semi-active suspension improves the body's vertical vibration acceleration, suspension dynamic stroke, and tire deformation by 31.3%, 21.4%, and 12.6%, respectively, so that the vibration of the body is controlled within a certain range, which greatly improves the smoothness of an electric car during driving.
Keywords: Semi-active suspension; Electric race car; Best control; Smoothness performance
CLC NO.: U469.7 Document Code: B Article ID: 1671-7988(2020)06-24-04
前言
電动赛车是当代大学生创新训练研究的主要对象,其操控性、制动性等性能分析和车身、车架、悬架等的设计可以很好地作为大学生的研究方向[1][2]。悬架是现代汽车上的重要总成之一,其主要任务是传递作用在车轮和车架或车身之间的一切力和力矩,且缓和路面传给车架或车身的冲击载荷,衰减由此引起的承载系统的震动,保证汽车的行驶平顺性,保证车轮在路面不平和载荷变化时有理想的运动特性,保证汽车的操控稳定性[3]。半主动悬架是一种可控悬架,可以不改变悬架刚度而只改变悬架阻尼来实现对悬架性能的调节,结构相对简单,成本低廉,性能优良,有广泛的应用前景[4][5]。解雅雯利用电磁阀改变节流阀的流通截面面积的大小,进而控制节流阀进出油液量,以把减振器阻尼进行多级分段调节[6]。赵强等引入惯容器替代中间质量实现双磁流变阻尼器的双层半主动隔振,建立系统动力学模型,设计基于模型的控制方法,采用具有全局收敛性能的自由搜索算法进行结构参数和控制器参数的联合优化,并建立数值模型及用复合激励对优化所得方案进行测试和验证[7]。相对于传统悬架系统,电动赛车的半主动悬架系统可以对车身行驶稳定性加强,可以使电动赛车车身的振动被控制在某个范围之内,大大提高电动赛车在行驶过程中的平顺性,从而在比赛中取得更好成绩。
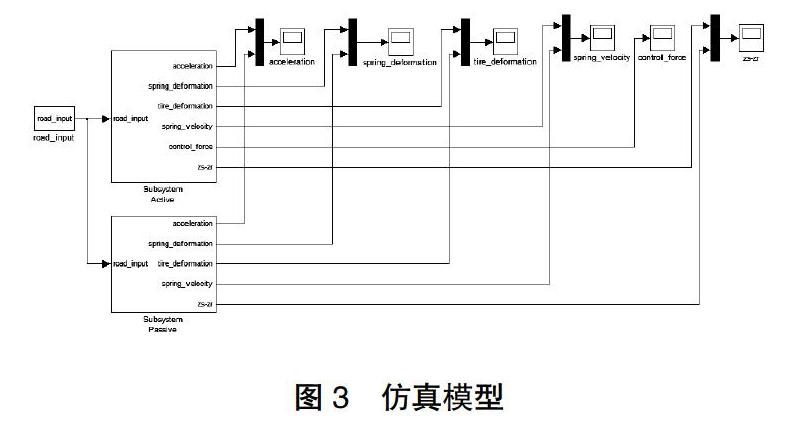
本文建立电动赛车二自由度的半主动悬架模型和综合性能目标函数,输入参数,获得悬挂质量垂直振动加速度、悬架动行程、轮胎动变形的输出,建立MATLAB/Simulink仿真模型,通过路面激励输入进行仿真,对悬挂质量垂直振动加速度、悬架动行程、轮胎动变形仿真结果与被动控制进行对比。
1 二自由度半主动悬架模型的建立
1.1 二自由度悬架动力学模型
1/4车辆模型经常用于悬架系统的分析和设计。传统被动悬架可以简化为具有弹簧和阻尼器的双质量二自由度振动系统,如图1a所示。在电动赛车的半主动悬架模型中保留了弹簧,用以支撑静载悬挂质量,阻尼器由一个力发生器u代替,如图1b所示,该模型对系统作了如下假设:
(1)悬挂质量与非悬挂质量均为刚体;
(2)悬架系统具有线性刚度和阻尼;
(3)悬架在工作过程中不与缓冲块碰撞;
(4)轮胎具有线性刚度,且在汽车行驶过程中终与地面接触。
从以上对比数据可看出,电动赛车半主动悬架在运行中的车身垂直振动加速度、悬架动行程、轮胎形变量的峰值相对于传统的被动悬架来说有明显的下降,说明半主动悬架相比于传统的被动悬架能更好的提升电动赛车行驶的平顺性和操纵稳定性。
3 结论
(1)建立了二自由度1/4电动赛车半主动悬架动力学模型,建立了电动赛车被动悬架和基于最优控制的半主动悬架的MATLAB/simulink仿真模型;
(2)利用编制的路面谱作为激励输入进行了仿真,与被动悬架相比,半主动悬架在车身垂直振动加速度、悬架动行程、轮胎形变量的改善度分别为31.3%、21.4%、12.6%。
参考文献
[1] 顾玉平,高江徽,郑竹安.大学生电动方程式汽车悬架系统的优化 [J].汽车实用技术, 2017, (7): 5-6.
[2] 杨仁华,陶陈.电动方程式赛车前悬架仿真分析[J].科技与创新, 2018, (20): 120-121.
[3] 刘建均,孙艺瑕,李胜.汽车悬架系统的时滞反馈控制及其参数优化研究[J].机电工程, 2020, 37(1): 54-58.
[4] 何炎权,刘少军,朱浩,等.基于磁流变阻尼器的半主动车辆座椅悬架模糊控制研究[J].汽车工程, 2006, 28(7): 667-670.
[5] 毛明,王乐,陈轶杰,等.惯容器及惯容器-弹簧-阻尼器悬架研究进展[J].兵工学报, 2016, 37(3): 525- 534 .
[6] 解雅雯.基于阻尼多级分段调节的半主动悬架系统[J].计算机测量与控制,2020, 37(1): 122-125+161.
[7] 赵强,张娜,岳永恒.基于惯容器的半主动座椅悬架控制和优化[J]. 控制工程,2019, 26(12): 2311-2316.
