
基于PSIM的TCR型静止无功补偿装置仿真
2020-05-03 14:07李必春
河南科技 2020年5期
关键词:功率因数
李必春


摘 要:静止无功补偿作为一种新型无功补偿方式,能快速、平滑地调节无功功率输出,以满足动态无功补偿的需要,对于三相不平衡负荷及冲击负荷有较强的适应性,广泛应用于电力系统中。基于电力系统仿真软件PSIM平台,建立TCR型静止无功补偿装置模型,在以功率因数为目标的控制策略下进行仿真,模拟装置在实际工况下的补偿效果。仿真结果表明,装置能达到设计要求,同时,利用PSIM仿真软件对深入理解和改进动态无功补偿装置具有积极意义。
关键词:静止无功补偿装置;PSIM;快速傅里叶变换FFT;功率因数
中图分类号:TM761文献标识码:A文章编号:1003-5168(2020)05-0016-04
Abstract: As a new type of reactive power compensation, static var compensation can quickly and smoothly adjust the output of reactive power to meet the needs of dynamic reactive power compensation, whcih has strong adaptability to three-phase unbalanced load and impact load, and is widely used in power system. Based on the PSIM platform of power system simulation software, the TCR static var compensation device model is established, the simulation is carried out under the control strategy with power factor as the objective, and the compensation effect of the device under the actual working conditions is simulated. The simulation results show that the device can meet the design requirements, at the same time, the use of PSIM simulation software has a positive significance for further understanding and improving the dynamic reactive power compensation device.
Keywords: static var compensation device;PSIM;fast fourier transform FFT;power factor
隨着经济的发展和社会的进步,越来越多的高科技设备投入使用,而配电系统大量使用含有电力半导体器件的设备,给电网来了严重的污染,具体表现为:电压偏差、电压波动和闪变、三相不平衡、暂态过电压、波形畸变等。这些问题不仅会带来经济损失,还会影响电力设备的稳定性和安全运行。静止无功补偿(TCR型)作为一种新型的补偿装置,具有快速、平滑的无功功率输出,快速补偿负载在动态过程中所需的无功,减少电压波动和网损,提高输配电的效率。为更好掌握静止无功补偿装置的特性,本文将利用PSIM电力仿真软件,通过系统建模和装置的仿真,验证静止无功补偿装置的动态补偿效果。
1 静止无功补偿装置工作原理
静止无功补偿装置(Static Var Compensator,SVC)是并联接入系统,装置的输出电流可控,调节使之输出为容性或者感性,以满足系统对无功性质的需求。本文分析的是晶闸管控制电抗器型(Thyristor Controlled Reactor,TCR)静止无功补偿装置,主要结构由可调的电抗器和固定容量的滤波电容器组构成,其工作原理是通过控制晶闸管的开通时间来改变流过电抗器的感性电流有效值,改变其吸收感性无功功率的大小,滤波电容器组则提供固定的容性无功功率,二者同时作用可使装置产生的无功连续可调。
在工程应用中,TCR基本结构是两个正反并联的晶闸管阀组与一个电抗器串联,三相电路结构大多数采用三角形方式接入电网,实际应用时将每相电抗器分成两部分,分别接在晶闸管阀组的两端,这种结构可以使晶闸管阀组得到保护,同时阀组的对地电压降为原来的一用半。另外,要设置滤波电容器组,根据工况可设置多条滤波支路,用以滤除装置产生的谐波或系统中谐波,同时提供一定的容性无功容量,静止无功补偿装置原理如图1所示。
2 PSIM电力仿真软件介绍
PSIM是专门用于电力电子以及电机控制领域的专业化仿真软件,该软件包含SIMCAD和SIMVIEM两个模块,具有快速的仿真功能和友好的用户界面等优点,针对不同用户,可以提供一种强有效的仿真环境。PSIM高效的算法克服大多数仿真软件的收敛失败、仿真时间长的问题,可控制任意大小的电力变换回路,控制回路仿真功能,在不同系统的仿真领域、控制环的设计以及电机驱动系统设计领域被广泛应用。PSIM作为仿真工具以及设计工具使用,可大大提高工作效率和生产性能,对降低开发成本和缩短研发时间都起到重要的作用。
3 基于PSIM的TCR型SVC装置结构建模及仿真
构建完善的仿真模型对于系统实际仿真效果极为重要,本文依据实际工程来建立仿真模型,主要从主电路、控制电路、控制脉冲电路、监测电路、系统电源、装置投切控制电路等方面对SVC系统进行建模。其以功率因数为控制目标,主要由参数采样、数据处理、PI调节器等部分构成。通过控制电路的电压和电流传感器取出系统的电压和电流信号,进行傅里叶变换,分别得到电压和电流的幅值和相位,利用PI控制器模块和对其进行控制,输出控制信号触发TCR主回路,达到控制功率因数的目的,控制原理框图如图2所示。
3.1 TCR及滤波支路主电路模型
主电路包括TCR支路和FC支路。晶闸管控制电抗器TCR,其结构是由两个反并联的晶闸管与一个电抗器串联而成的,三相电路采用三角形连接并入电网。每相电抗器等分成两部分,分别接在晶闸管阀组的两端,主要起到保护晶闸管阀组作用;滤波支路FC结构是由电容器和电抗器串联而成的,设置5、7、11次滤波支路,主要作用是提供容性无功功率,并滤除由TCR支路产生的谐波电流。在TCR和FC支路前均设置有投切开关,可以控制二者投入系统的时刻,便于观察系统相关参数的变化。
3.2 控制电路模型
控制方式设计的好坏直接影响补偿仿真的效果。控制器系统应能检测系统相关变量,根据检测变量和给定参考输入量的大小,产生相应的晶闸管触发延时角,以调节补偿装置吸收的无功功率[1-3]。本文以功率因数为控制目标建立仿真模型,稳态下的功率因数控制环节由参数采样、PI调节、数据处理等构成。通过仿真软件提供电压传感器和电流传感器模型对电网电压、电流进行采样,再进行快速傅里叶变换,得到电压和电流相位的实时数据,利用数学计算模块换算以及PI增量控制,得到随系统功率因数变化的控制信号。
3.3 控制脉冲电路模型
控制脉冲电路是根据控制电路输出的控制信号产生相应的触发延时角的晶闸管触发脉冲[4-5]。晶闸管的导通角大小决定感性无功功率的输出多少,其角度应受控于系统的电压和电流电量参数,通过变换得到如前所述的控制电路输出的信号波形,以其为门限值,采用三角波与该波形进行比较,得到PWM输出控制脉冲信号波形。采用的三角载波信号频率为50Hz,因晶闸管阀组为正反向并联,因此,每相为两组三角波信号源,且相位相差180°,三相之间相位各自相差120°,Control为控制电路输出信号,TCR-AB+、TCR-AB-、TCR-BC+、TCR-BC-、TCR-CA+、TCR-CA-对应TCR主电路晶闸管的控制信号。
3.4 监测电路模型
监测电路主要作用是当系统投入TCR支路和电容器支路时,反映系统功率因数和功率的变化情况。利用PSIM仿真软件提供的电压传感器和电流传感器模块,将采集系统的电压和电流进行快速傅里叶变换,得到电压、电流信号的幅值和相位,通过丰富的数学运算模型组合计算得到系统的有功功率、无功功率和功率因数。在设定的仿真时间内,实时采集系统的参数,当投入电容器和TCR支路时,利用Simview窗口观测到相关参数的变化。
3.5 系统电源电路模型
TCR型静止无功补偿装置并联在电力系统中,采用三相电源模拟电网线路,L为电网系统中的电感,R为系统中的损耗电阻。
3.6 投切控制电路模型
电路主要作用是待系统稳定后,让TCR支路和FC滤波支路在设定的时刻投入。主要用到模块库中提供的时间元件,该元件是分段线性电压源的一个特殊情况,它可以看作一個接地电压源,数值相当于仿真时间。具体采用时间元件与信号源比较方式,经过一定的延时,在需要的时刻比较器输出信号,使各支路开关闭合,装置投入。为方便观察功率因数变化,这里设置为0.4s,使TCR和FC的投入开关闭合,装置投入。
4 主仿真参数设置
4.1 相控电抗器参数设置电路
本文以6 kV系统,容量为6 000 kvar的SVC装置为例进行说明。根据系统电压、额定容量、出发角度等参数计算相控电抗器的电感,计算值按式(1)得到。
式中,[U]为装置额定电压;[I]为TCR额定电流;[Ke]为有效电流系数,取1.02;[α]为晶闸管导通触发角,其取值范围为[[π]/2,[π]]。
触发角取110°,按式(1)计算得到电感为32.86 mH,每相电抗器由两个电抗器串联而成,每个电抗器电感为16.42 mH。
4.2 滤波电容器组参数设置
TCR支路采用的是三角形连接方式,装置运行时产生的3 n次谐波不会流入系统,因此仿真支路设置的是5、7、11次电容滤波支路。按照经验公式可以得到5、7、11次谐波电流最大标幺值分别为0.25、0.18和0.13,按此比例可以计算出各次电容滤波支路的容量,5次支路为2 680 kvar,7次支路为1 920 kvar,11次支路为1 400 kvar。按各次支路容量,可以确定滤波电容器电容量和电抗器电感,如表1所示。
4.3 其余参数设置
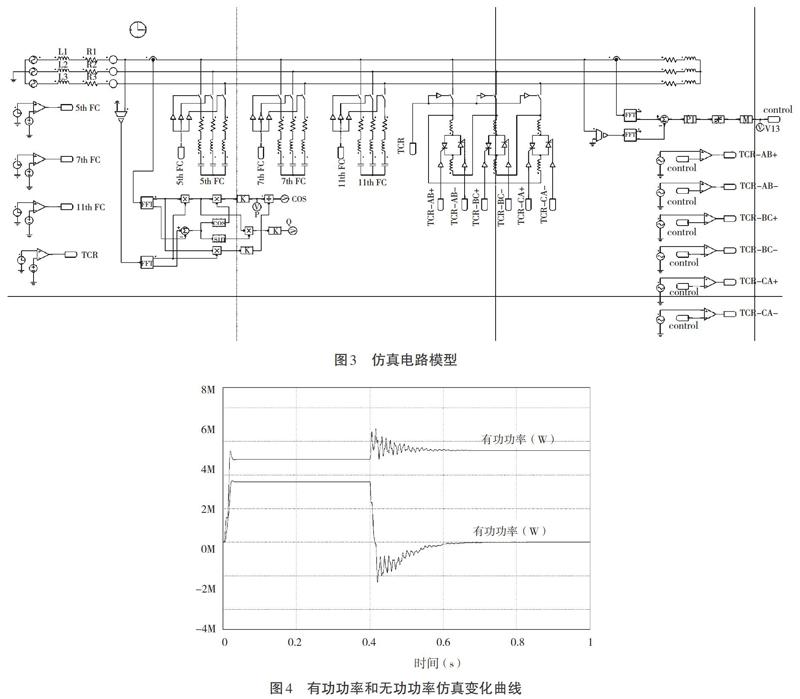
电网阻抗设置为纯感性0.1 mH,负载电感为10 H,电阻为50 Ω。总仿真时间设置为1 s,在时间为0.4 s时,投入TCR支路和FC支路,仿真运行后,通过SIMVIEW调出相关参数,观察其变化波形。仿真电路如图3所示。
5 仿真结果分析
建立了仿真模型,仿真时间为1.0s,仿真结果如图4、图5所示,图4为有功功率和无功功率变化趋势图,图5为系统功率因数变化趋势图。从图中可以看出,第一阶段,在0~0.4 s,静止无功补偿装置未投入时,由于感性负存在,系统功率因数较低,大概保持在0.8左右,无功功率缺口较大;第二阶段,在0.4~0.6 s,TCR支路和FC滤波支路同时投入,各参数经过装置一段时间的调整后稳定,无功功率大幅度减小,且功率因数显著提高,经过一段时间振荡后稳定,稳定的时间约为150 ms;第三阶段,在0.6 s之后,装置不再进行调整,功率因数稳定在1。从整个仿真过程可以看到,静止无功补偿装置所发出的无功功率能较好补偿系统所需的无功缺额,快速补偿和提高功率因数,达到设计要求。
6 结论
本文采用PSIM电力电子仿真软件,对静止无功补偿装置的设计参数进行了仿真,具体以功率因数为控制目标对静止无功补偿装置投入进行仿真,其响应时间快速(为毫秒级),能够适应无功功率变化频繁的补偿要求。其间通过仿真验证了系统建模和控制策略的正确性,人们可改变装置部分设计参数进行仿真验证,以便进一步掌握静止无功补偿装置原理和完善补偿装置设计。PSIM作为用于电力电子以及自动控制领域的专业化仿真软件,包含丰富的控制元件库和强大数学运算模型,具备控制回路仿真功能,其具有仿真速度快、容易掌握的特点,非常适合电力工程的设计应用,对于提高效率具有重要作用。
参考文献:
[1]王兆安,杨君,刘进军.谐波抑制与无功补偿[M].北京:机械工业出版社,2005.
[2]蔡平,罗安,杨翠翠,等.高压SVC系统的设计与实验研究[J].电力电子技术,2011(6):44-57.
[3]杜严行.基于PSIM的±10 kvar静止同步补偿器建模及仿真[J].宁夏电力,2014(1):19-24.
[4]徐德鸿.电力电子系统建模及控制[M].北京:机械工业出版社,2006.
[5]华建军,沈艳霞,纪志成.基于PSM断续导通模式的DC-DC变换器的建模与仿真研究[J].电机与控制学报,2007(9):522-528.
猜你喜欢
西部论丛(2018年12期)2018-11-28
中国新技术新产品(2017年2期)2017-01-20
大经贸(2016年11期)2017-01-06
中国科技纵横(2016年15期)2016-12-29
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
科技视界(2016年7期)2016-04-01
现代电子技术(2015年1期)2015-04-13
中国高新技术企业(2015年4期)2015-03-13
中国高新技术企业(2015年2期)2015-03-12
