
自动驾驶传感器筛选与优化配置程序研究
2020-05-03 13:54朱明哲刘保光李柏林郑广州
汽车实用技术 2020年7期
关键词:自动驾驶
朱明哲 刘保光 李柏林 郑广州

摘 要:自动驾驶传感器配置需求随着汽车智能化和电动化的快速发展不断增加。基于当前自动驾驶传感器配置无有效筛选途径的现状,通过建立数据库、设定指标项、制定评判准则和选定算法程序快速实现传感器配置方案匹配,并采用响应曲面算法进行优化筛选,满足用户传感器配置需求。
关键词:自动驾驶;传感器配置方案;优化筛选;算法程序
Abstract: With the rapid development of intelligent and electric vehicles, the demand of automatic driving sensor configuration is increasing. Based on the current situation there is no effective way to filter the sensor configuration of autopilot, through the establishment of database, the setting of index items, the formulation of evaluation criteria and the selection of algorithm program, the scheme matching of sensor configuration can be realized quickly. Response surface algorithm is used to optimize the selection to meet the needs of user sensor configuration.
前言
电动化和智能化已经成为全球公认的汽车发展趋势,新能源智能汽车不仅是科技创新的制高点,也是创造新的经济增长的重要引擎[1,2]。随着新能源智能汽车技术水平提升和城市交通压力增加,越来越多企业加入自动驾驶汽车研究。由于交通环境的复杂性,为保证自动驾驶汽车行驶途中的安全性与可靠性,需搭载多种高精度传感器进行信息融合实现全方位环境检测,而针对不同的自动驾驶需求,需从性能、感知范围、温度和黑暗适应性、硬件成本等多方面进行筛选优化,通过长时间调研形成不同的自动驾驶传感器配置方案[3]。因此,针对人们对自动驾驶传感器配置需求的增加,急需一种传感器筛选优化配置程序,快速便捷的实现自动驾驶方案匹配,满足用户传感器配置需求。
1 方案设计
1.1 自动驾驶传感器配置指标项设定
一般情况下,自动驾驶汽车主要包含视频摄像头、雷达传感器、IMU等设备[4],通过这些设备信息融合实现准确反馈实时状况,并自动形成详尽的贴合用户需求的地图。各种传感器的特性不同,优劣势也各不相同,激光雷達能够精确感知各种道路环境状况,但易受恶劣天气影响;毫米波雷达受天气影响较小,但感知人不准确,易受障碍物影响;摄像头能够感知人和事物是什么,但探测距离较短且易受天气影响。因此,在选择自动驾驶传感器配置时,需要多方面参数考虑,特别是关键性传感器不能减配。
传感器参数主要包括传感器精度、分辨率、灵敏度、动态范围、传感器视角、误报率、温度和黑暗适应性、硬件成本等指标。根据传感器不同参数划分不同级别,随着不同传感器配置收集,扩容划分从而更精确的设定级别,形成数据库。
1.2 自动驾驶传感器配置评判准则制定
传感器的配置需要考虑到覆盖范围、冗余性。
(1)覆盖范围
车体360度均需覆盖,其中前方探测距离≥100米;后方探测距离≥80米;左右探测距离≥10米。
(2)传感器冗余
车辆周边感知区域内每个方向至少有2个传感器配置。
保证在一个传感器失效或者出现工作受限的状况,有另外的传感器依旧可以继续进行一定程度的检测工作。
除此之外,自动驾驶传感器配置方案首先需确保其功能安全性,设定最低评判准则,在此基础上根据用户功能需求(无人循迹、避障、自主行驶等)和不同级别的自动驾驶方案界定评判标准。
以L4级自动驾驶方案为例,调研现有市场传感器配置方案,图1为L4级别市场方案之一,分析组合中必配传感器,设定为L4级别基本配置,程序筛选L4级别方案,结果需至少包含设定的基本配置传感器,然后在此基础上按需增加传感器,或按用户功能要求设定参数。
最低值,基于中心旋转组合设计(CCRD)形成组合矩阵,根据矩阵列表模拟并实车测试自动驾驶试验结果,结果录入数据库。根据组合矩阵采用软件design expert建立数学模型并进行方差分析,进而得出最优配置方案。同理得出L3级别自动驾驶方案筛选流程。
1.3 自动驾驶传感器配置算法程序选定
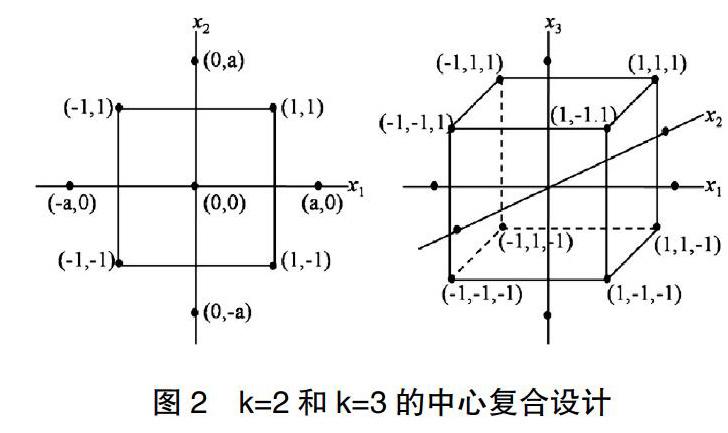
响应曲面法是一种通过分析目标函数与参数变量关系,建立数学模型并进行方差分析的方法,是数学方法和统计方法结合的产物[5],其中中心复合设计(CCD)是响应曲面中最常用的方法。该方法以添加轴点和中心点进行构建,以拟合相关系数非常高的非线性拟合模型,从而有效的预测模型参数,其模型如下:
拟合二阶模型中心复合设计具有序贯的本质,由2K析因设计或分式析因设计在坐标轴上添加2K个试验点(±α,0,0,…,0),(0,±α,0,…,0),(0,0,±α,…,0),…,(0,0,0,…,±α)和nc个中心点(0,0,0,…,0)所组成。k=2和k=3的中心复合设计如图2所示[5]。
Design-Expert软件是主要的响应曲面法分析工具,该软件可通过形成等高线图,根据特征来寻找最优点。对于稳定点的一般数学解,写成矩阵记号形式为:
其中,b表示一阶回归系数的一个(k×1)向量,B表示(k×k)对称矩阵,其主对角线元素为纯二次系数( ),非对角元素为混合二次系数( )的1/2。 关于向量x的元素的导数等于0,即:
通过Design-Expert软件建立模型,然后采用方差分析(ANVOA)来验证模型是否符合要求。检验方法通过预测拟合系数、失拟值、F值、P值、拟合度、信噪比和修正拟合系数来判定[6]。
2 自动驾驶传感器配置筛选优化
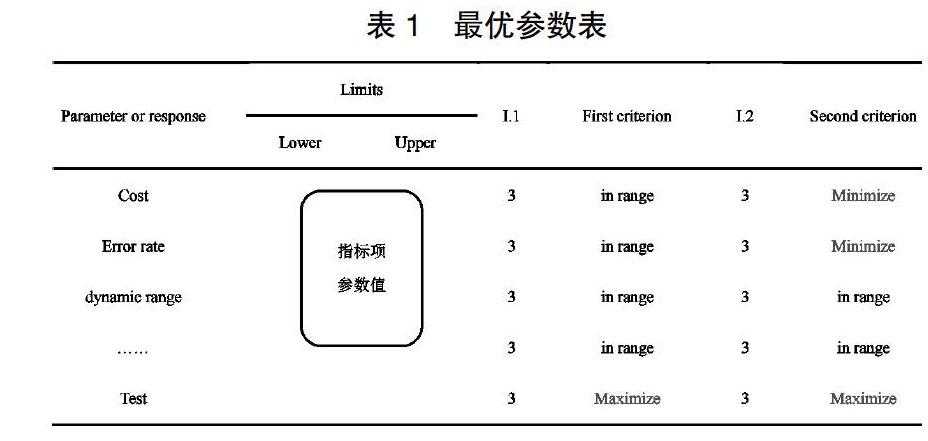
基于自动驾驶方案矩阵,可通过RSM方法进一步实现优化,从而得出自己所需的最优配置[7]。比如,以最小成本和最小误报率获得最优试验结果,通过表格会得出几组满意度最大的参数配比,即为用户所需的传感器配置方案,如表1。 (下转第51页)
基于自动驾驶方案矩阵 可通过RSM方法进一步实现优化 从而得出自己所需的最优配置[7]。比如 以最小成本和最小误报率获得最优试验结果 通过表格会得出几组满意度最大的参数配比 即为用户所需的传感器配置方案 如表。
3 结论
(1)不同级别自动驾驶配置方案需根据已录入数据库方案进行挑选 形成基本配置并按需增加 然后基于算法程序对同类传感器从精度、环境适应性、硬件成本等方面 设定硬性標准 进行筛选优化 从而确定最优型号。以此类推得出其他传感器型号 最终可得出传感器配置方案。
(2)本文基于当前自动驾驶传感器配置无有效筛选途径的现状 建立数据库并采用响应曲面算法进行优化筛选 但目前方案存在一定缺陷性 无法系统形成传感器配置方案。
伴随着自动驾驶传感器需求日益增加 将会不断扩充数据库 同时会有更有效的算法程序 更快速便捷的满足用户需求。
参考文献
[1] 李晓丹.新能源汽车发展现状及应用前景[J].中国能源,009,3(8): 43-45.
[2] 郑伟.我国新能源汽车产业的现状与发展趋势[J].汽车工程师, 0 (0): 9-.
[3] 王艺帆.自动驾驶汽车感知系统关键技术综述[J].汽车电器,06 ():-6.
[4] 黄贤武,郑筱霞,传感器.传感器原理与应用[M].电子科技大学出版社,999.
[5] 蒙哥马利.实验设计与分析[M].傅珏生,张健,王振羽译.北京:人民邮电出版社,009:347-397.
[6] 薛国春,刘会霞,李品,等.基于响应曲面法的激光透射连接硅与玻璃的工艺研究[J].中国激光03 (3):76-85.
[7] 刘保光,王霄,刘伟,等.激光透射点焊车用材料 PMMA 的工艺优化[J].中国激光, 06, 43(5): 0503004.
猜你喜欢
南风窗(2017年23期)2017-11-23
科技创新导报(2017年26期)2017-11-08
科学与财富(2017年28期)2017-10-14
中国计算机报(2017年22期)2017-09-16
山东工业技术(2017年15期)2017-09-05
中国科技术语(2017年3期)2017-07-10
汽车周刊(2017年5期)2017-06-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
家用汽车(2016年9期)2016-11-04
