
智能网联场景下纯电动客车车速规划算法研究
2020-05-03 13:54齐善威
汽车实用技术 2020年7期
关键词:智能网联汽车
齐善威


摘 要:文章针对智能网联场景,在考虑交通信号灯SPAT信息的基础上,采用MPC模型预测控制算法对队列行驶的纯电动客车进行实时车速规划,实现了车辆交通路口前不停车跟驰行驶,同时保证了车队中各个车辆的行驶安全性、能耗经济性、驾驶平顺性及乘坐舒适性。
关键词:智能网联汽车;经济车速规划;模型预测控制算法
Abstract: In this paper, the model predictive control algorithm is used for real-time vehicle speed planning for pure electric vehicles in the intelligent and connected scenario, and the traffic signal timing information is fully considered in the process. As a result, the MPC strategy can not only ensure that vehicles dont stop in front of traffic lights, but also improve the driving safety, energy consumption economy, driving comfort and riding comfort of each vehicle in the fleet.
前言
随着智能交通领域不断发展,电动化、智能化、网联化和共享化成为未来汽车发展的必然趋势。在城市交通环境中,车辆大部分处于列队跟驰行驶状态,因此搭建合理的跟车模型对提升车辆经济性和安全性具有重大意义。目前,研究人员为解决该问题建立了诸多模型,包括最优车速模型(OVM)[1]、广义力模型(GFM)[2]和全速差模型(FVDM)[3]等,但这些模型均只以行驶安全性为目标,并未结合SPAT信息对能耗经济性和交通畅通性进行综合优化。在多目标优化问题求解过程中,模型预测控制(MPC)由于局部最优、实时应用和鲁邦性好等優点,广泛应用于各研究领域中[4]。本文基于智能网联场景,结合V2I和V2V通信获取的车辆行驶信息以及交通信号灯正时信息,采用MPC算法针对列队行驶的纯电动汽车进行经济车速规划,旨在全面提升车辆综合行驶性能。
1 车辆纵向动力学模型
本文在进行车速规划时,仅考虑车辆的纵向动力学特征,忽略其振动特性和操纵稳定性。在纯电动汽车行驶过程中,由动力电池提供驱动力来克服滚动阻力、空气阻力、坡度阻力和加速阻力[5],其需求功率计算方法如公式(1)所示。此外,纯电动汽车制动时还可以进行制动能量回收,为保护动力电池,设定最大回收功率为30kW。
式中,ηT为整车效率,取0.95;m为整车质量,取13000kg;g为重力加速度;f为滚动阻力系数,取0.1;i为道路坡度,考虑到城市交通环境中道路坡度较小,坡度值取0;Cd为空气阻力系数,取0.65;A为迎风面积,取8m2;u为行驶速度;δ为旋转质量换算系数,取1.07;du/dt为加速度。
2 经济车速范围规划
在进行车速规划时,首先需要结合当前路段的SPAT信息和车辆行驶位置信息对经济车速范围进行计算,保证车队各车辆均能够不停车通过交通路口,提高行驶经济性和交通畅通性[6]。其车速范围的上下限计算公式如下所示。
式中,角标i代表车队中第i辆车; 和 分别为经济车速范围上限和下限;k为当前时刻车辆行驶时间,k0为前方交通信号灯初始相位;di为车辆到信号灯的距离;tg为绿灯维持时间,tr为红灯维持时间,tc为交通信号灯的一个循环周期,该循环以红灯-绿灯的顺序进行,本文将黄灯闪烁时间并入红灯等待时间中;Kw为前方信号灯当前时刻的循环次数; 为城市工况下客车的最高车速;mod(k-k0,tc)为取余函数。
3 MPC车速规划
在确定各个车辆的经济车速范围后,采用MPC策略对预测时域内的车速进行细致规划,本文预测时域选择为5s。MPC策略实施时分为状态预测、滚动优化和反馈校正三大部分,首先根据经济车速可选范围将预测时域内的车速可达状态进行离散,本文将其离散为20个节点;然后在滚动时域内采用动态规划算法对目标函数进行求解寻优,得到5s内的最优加速度序列和车速序列,其优化过程中状态变量为行驶车速,控制变量为加速度;最后提取预测时域内的第1秒车速作为该车辆下一时刻的引导车速,同时将预测时域内5s车速规划结果通过V2V通信传递至后车,为后车确定安全车间距提供参考。通过不断重复上述过程,实现了车速规划的滚动优化和反馈调节。其滚动时域内的目标函数如公式(6)所示。
式中共分为四部分,从左到右依次代表能耗经济性、行驶安全性、交通畅通性和行驶平顺性的评价指标,其中T为预测时域长度,t为时间变量;ωp(p=1,2,3,4)为各性能指标计算项对应的权值系数;Sij为第i辆车和第j辆车实际车间距同理想跟车距离Sd之间的差值,Si和Sj分别为车i和其相邻前车j所处的位置。
公式(9)为优化算法的约束条件,a为行驶加速度,上标min和max分别代表相应变量的最小和最大限值。
4 仿真验证
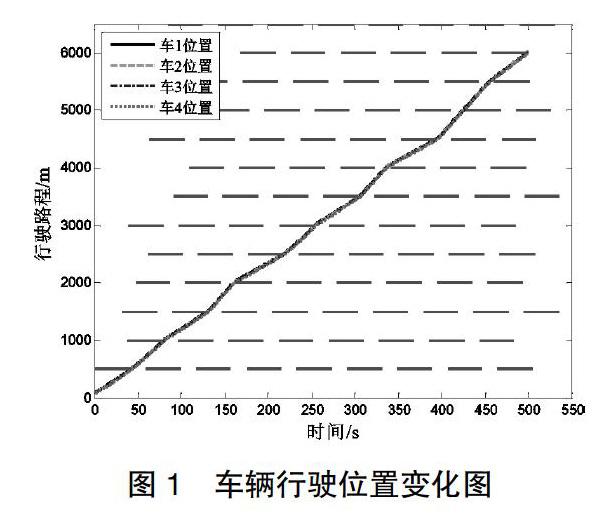
本文选取4辆型号相同的纯电动客车组成一个车队,对单车道车辆跟驰行为进行研究,忽略车辆换道和超车行为。对其进行仿真时,假定红灯持续时间为40s,绿灯持续时间为18s;两个交通信号灯之间间隔500m;车辆初始车速、初始车间距及信号灯初始相位随机产生;相邻两车期望车间距为12m;道路最高车速为18m/s,最低车速为0m/s;加/减速度绝对值不超过1.5m/s2;仿真时长为500s。其仿真结果如下图所示,图1中红色水平线代表红灯的持续阶段,相邻红线之间的空白区域为绿灯持续阶段。
5 结论
从仿真结果可以看出,采用MPC策略进行车速规划可
以保证车队中所有纯电动汽车均能够不停车通过交通路口,其车速变化平稳,车间距均在5m以上。可见MPC策略不仅可以提升交通环境畅通性,还能够充分保证车辆的行驶安全性、能耗经济性、驾驶平顺性和乘坐舒适性,对提高智能网联场景下车队行驶性能具有重要价值。
参考文献
[1] Bando M, Hasebe K, Nakayama A, et al. Dynamical Model of Traffic Congestion and Numerical Simulation[J]. Physical Review E, 1995, 51(2):1035-1042.
[2] Helbing D, Tilch B. Generalized Force Model of Traffic Dynamics[J]. Physical Review E, 1998, 58(1):133-138.
[3] Liu L,Zhang N. A New Car Following Model Considering the Accele -ration of Leading Car[C]//International Conference on E-Product E-Service and E-Entertainment. IEEE, 2010:1-4.
[4] Xie S,Hu X,Liu T,et al. Predictive Vehicle-Following Power Manage -ment for Plug-In Hybrid Electric Vehicles[J]. Energy, 2019, 166: 701-714.
[5] 余志生著.汽車理论[M].北京:机械工业出版社,2008.
[6] HomChaudhuri B,Vahidi A,Pisu P. Fast Model Predictive Control- Based Fuel Efficient Control Strategy for a Group of Connected Vehicles in Urban Road Conditions [J]. IEEE Transactions on Control Systems Technology, 2017, 25(2):760-767.
10.16638/j.cnki.1671-7988.2020.07.010
猜你喜欢
计算机时代(2019年10期)2019-11-11
计算机应用(2019年4期)2019-08-01
中小企业管理与科技·上旬刊(2019年6期)2019-07-20
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
移动通信(2019年3期)2019-06-27
移动通信(2019年4期)2019-06-25
商情(2018年25期)2018-07-08
当代经济管理(2018年5期)2018-05-25
科技视界(2017年29期)2018-01-18
