
一种具备爬楼功能的路空两用无人机的设计
2020-04-30 03:19罗汉杰施嘉濠伍增渲
湖北农机化 2020年3期
罗汉杰 倪 虹 施嘉濠 伍增渲
(杭州师范大学钱江学院,浙江 杭州 310018)
0 引言
旋翼飞行器隶属于无人机技术领域的一个分支,也被称为无人驾驶飞机(简称UAV)。随着中国制造2025和互联网+,飞行器技术发展越来越成熟。其中旋翼飞行器制作成本低,安全性能高,不仅应用于军事上的侦察机和无人靶机,还被应用于民用方面。
在如今的市场上,传统的多旋翼飞行器大部分采用固定桨距的螺旋桨,通过调整电机的PWM波控制螺旋的转向和转速,产生相互抵消的反桨扭矩来控制飞行器的各种姿态。其中的路空两用无人机功能相比较而言更多,但传统的路空两用无人机大多数为简单的轮动功能加上飞行功能,功能单一,并且变形之间转换机构过于复杂难以适用于多种场合,只有简单的物流运输、空中拍摄、播种等。特别是面对地形复杂多变的环境中无法正常使用,不够稳定,局限性也大,不能应用于多种场合。
1 路空两用无人机结构设计概念总布局
一种具备爬楼功能的旋翼飞行器是基于arduino2560微型控制板,搭接树莓派利用Opencv进行图像处理以及多种传感器组合而成。该旋翼飞行器具备轮动功能、爬楼功能和飞行功能。特点在于该旋翼飞行器轮动过程具备全向轮功能,即轮动方向360°全方位可调并且轮动过程中具备2种状态:一个是对称的四轮平动状态。另一个是六轮爬楼状态,并且该旋翼飞行器具备的爬楼功能,且爬楼过程中,6个车轮的间距可以根据楼梯高度及间距调整,可适应不同类型楼梯同时旋翼飞行器的桨距长度、桨距角度和螺旋桨位置均可360°无死角的调节,有利于通过桨距调节增强稳定性,增加狭小涵道通过性和空旷地带抗风能力,同时该旋翼飞行器具备的折叠功能,具有便携性并且结构精炼,整体重量较小。
2 路空飞两用无人机结构设计组成
该路空两用无人机结构,包括机体、变形支臂、控制器和无线模块。机体包括中心电机、机架、主齿轮、副齿轮和变向齿轮,主要功能是为飞行器提供驱动力和路空的切换作用。变形支臂则是包括第一关节架、第二关节架、第一变形驱动组件、第三关节架、第二变形驱动组件、锁止组件和行进动力组件,主要功能用与飞行器的各种模式切换作用,根据收集到的数据进行模式的切换来到达使用要求。
3 路空两用无人机的各种模式设计及运行方式
3.1 飞行模式的运行方式
在飞行模式下如图1,路空飞行器基本姿态为X模式:通过arduino2560的微控制板控制8个无刷电机的转速,达到飞行器在飞行模式下的8种状态,分别为垂直上升状态、垂直下降状态、向前状态、向后状态、向左状态、向右状态、顺时针改航向状态、顺时针改航向状态。如图2为8种状态的运行方法:当旋翼飞行器稳定后,A、B、C、D 4个电机同时加速时为垂直上升状态,同时减速时为垂直下降状态;当A、B减速,C、D加速则为向前状态;当A、B加速,C、D减速则为向后状态;当A、D减速,B、C加速则为向左状态;当A、D加速,B、C减速则为向右状态;当A、C减速,B、D加速则为顺时针改航向状态;当A、C加速,B、D减速则为顺时针改航向状态;优点在于利用8个动力电机转动得到更大的升力,更加容易使得飞行器起飞,达到飞行模式的8种状态。并且通过Opencv所传输的信息处理变形为其他模式。如当路空两用的旋翼飞行器在空中需要穿过一个通道(例如树枝与树枝之间的间隙)时,陆空两用的旋翼飞行器进行飞行折叠,(折叠模式如图3),以避免在穿过时发生碰撞。
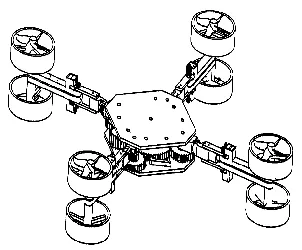
图1 飞行模式
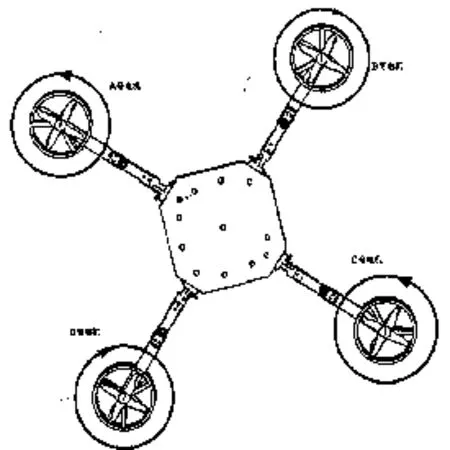
图2 8种状态的运行方法
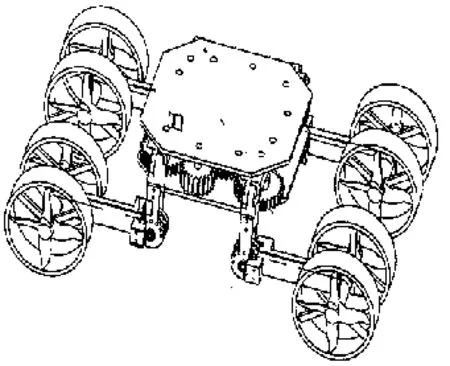
图3 折叠模式
3.2 行走模式的运行发送
当飞行模式通过Opencv所发出的信号,需变形为行走模式时,如图4所示,通过中心电机转动,驱动各个变形支臂同步转动,并且向下翻转,使得两用螺旋桨处于垂直于行进方向。此时8个两用螺旋桨均与地面接触,电机转动即可驱动机架在地面上行进,实现路空两用的功能。并且可通过PWM对电机的转速控制,来控制行走模式时飞行器的速度,可适应于更多的场合下。
3.3 爬楼模式
当行走模式时面对地形复杂多变的环境中无法正常使用,通过Opencv发出的数据,变形为爬楼模式,如图5所示,前变形支臂分为2根支架各自成θ角,60°≤θ≤90°,使得两支臂上均形成能够自由摆动的V形轮架。后变形支臂的2根一侧转动,使得左后支臂及右后支臂内的第三支架与竖直方向呈0.5θ角;此时该地空两用的旋翼飞行器呈现六轮状态,且位于前左右2组车轮分别位于2个能够自由摆动的V形支架上;当V形支架上的一个车轮抵住台阶并转动时,将沿台阶向上滚动(向上滚动的过程中V形支架发生转动)。因此,爬楼模式的地空两用的旋翼飞行器能够沿着台阶向上行驶,适应于各种地形复杂多变的环境。
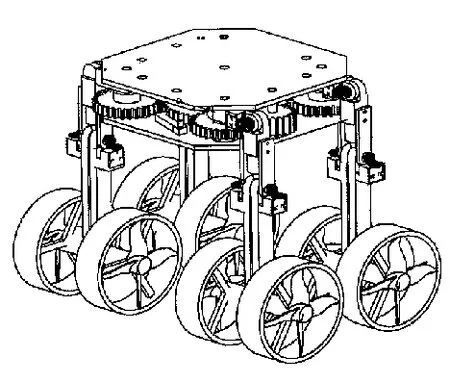
图4 行走模式
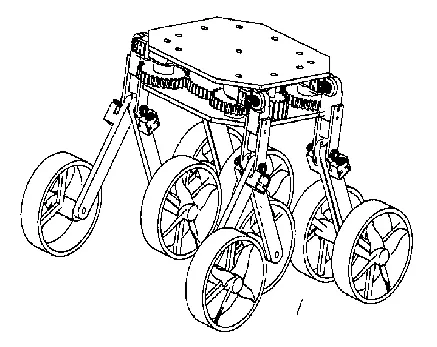
图5 爬楼模式
4 路空两用无人机硬件设计
路空两用无人机可通过变形驱动组达到各种模式的变形。该旋翼飞行器的控制主要在几种的模式变形中,通过Opencv传输的信号,面对各种不同的环境中实现飞行器不同的功能变换。其该旋翼飞行器控制包括飞行模式、行走模式、爬楼模式之间变形。所需硬件如图6。
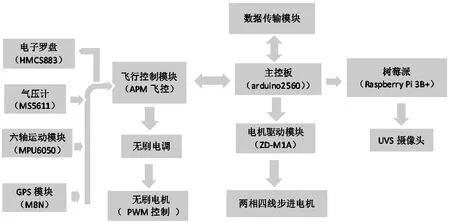
图6 硬件框架
4.1 飞行控制模块
路空两用无人机的飞行控制模块选用APM飞控,该飞控模块为两级PID控制,其中一级为导航,另一级为控制。APM飞控是由微型处理器以及传感器组合而成。当处于飞行模式时,遇到突发情况,外界干扰等一些原因导致两用飞行器处于不平衡状态时,飞行器是无法飞行的,这是APM飞控微处理器通过各传感器实时发出的信号,进行采集,运算,采用惯导算法计算出姿态角,通过PID计算,发出PWM信号,控制各无刷电机转速,到达飞行模式的8种状态。图7为APM飞控原理图。
4.2 电机驱动模块
两用无人机的电机驱动模块使用的是ZD-M1A步进驱动器(如图8),工作原理在时序通电时,通过脉冲信号来控制步进电机的转速以及加速度,收到一个脉冲转动一个角位移,通过脉冲个数及频率控制。当Opencv发出信号,通过APM飞控计算出的姿态角度,控制步进电机的转速,完成不同的模式以及相应的功能。该驱动器不需外部设备加以供电,重量轻,方便使用。ZD-M1A步进电机驱动器的接线图如图9。
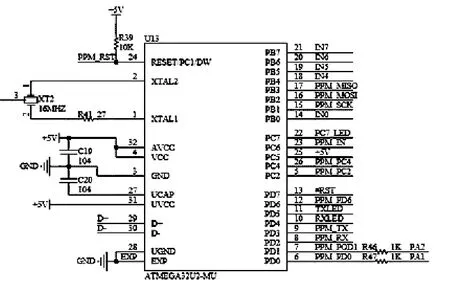
图7 飞控原理图

图8 ZD-MIA步进电机驱动模块
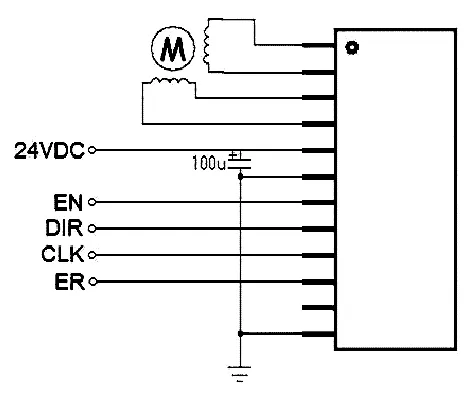
图9 ZD-MIA步进电机驱动器接线图
4.3 通信系统
路空两用无人机在通信方面主要在于arduino 2560与树莓派Raspberry Pi 3B+之间的通信,通过Opencv进行图像识别判断无人机的行进模式,通过Opencv发出的通信信号(波特率一般为9600),等待主控板arduino 2560进行接收,接收到的信号通过PWM信号来控制各电机的运转,到达相应模式、相应状态和相应功能。
5 路空两用无人机的展望
一种具有爬楼功能路空两用无人机以arduino2560微型控制板为主控制板,通过与树莓派进行通信,利用Opencv进行图像识别发出信号控制各模块变形各种模式。其最大的特点是爬楼功能,可在复杂多变的地形上应用,无论是凹坑还是凸起都可实现陆地变形功能,并且在遇到楼梯时,四轮切换为六轮爬楼姿态,并且具有全向轮的功能360°无死角的爬楼,无需过多的角度控制即可爬楼,易控制,有利于通过桨距调节增强稳定性,也可以根据楼梯的高度进行变换,两变形支臂可切换相应的角度θ,目前可转动的角度只能在60°≤θ≤90°,只能针对社区居民楼的楼梯高度进行切换,还未实现对于所有楼梯的爬楼功能,缺少对变形支臂的长度无法根据不同的楼梯高度切换,需往后通过机械结构的设计实现来完善爬楼功能。
猜你喜欢
水上消防(2022年1期)2022-11-20
青少年科技博览(中学版)(2022年6期)2022-08-31
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
今日农业(2019年12期)2019-08-15
电子制作(2019年9期)2019-05-30
大众摄影(2018年7期)2018-07-05
青岛画报(2018年1期)2018-02-23
方圆(2017年24期)2018-01-17
北京航空航天大学学报(2016年8期)2016-11-16
