
一种飞行巡线机器人的设计与实现*
2020-04-25 13:37:48彭晓燕杨程富周蔚勇
通信技术 2020年4期
李 论,彭晓燕,杨程富,周蔚勇
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
0 引 言
随着人工智能技术的飞速发展,无人飞行器(Unmanned Aerial Vehicle,UAV)+行业应用成为人工智能发展的刚需。以智能化为主要依托的四旋翼飞行器技术,越来越多地应用于影视航拍、交通巡查、植保施肥、电力输配电巡检、灾难救援、测绘跟踪和快递运输等领域[1-6]。特别是飞行巡线机器人作为电力输配电巡检网络发展领域的重要分支,已成为我国乃至世界科技创新战略中的重要成员之一[7-8]。然而,四旋翼飞行器因其性能卓越、成本低廉和结构新颖,被广泛应用于电力线路巡检任务[9]。传统的输配电网络巡检是巡检电工携带检测仪器装备沿着输配电网络线路步行对架空输电线路进行逐一排查,人为判断或发现故障点[10-11]。这种巡检方式存在工作效率低、检测质量不高、山区恶劣环境下电工步行危险性大等缺点。
近年来,无人机被全面用于电力线路巡线作业,主要应用于国家电网等电力传输行业领域,具有巡线速度快、应急瞬速等优点,为保障人员高空危险作业安全立下了汗马功劳。然而,使用电力智能巡检飞行机器人能够对野外架空电力线缆进行自动化高空作业是智能电网发展的重要方向[12-13]。巡线机器人自动巡检在提升劳动效率、降低营运成本、优化人力资源结构以及减少高空危险作业安全事故等方面做出了重大贡献。根据电子设计竞赛赛题的设计要求和架空输配电电缆环境特点,本文设计提出一种基于TI 公司的Tiva ™C 系列TM4C123GH6PM微控制器的巡线机器人的设计方案。采用高性能微控制器作为巡线机器人的飞控主处理器[14],为了满足自动巡检任务,在飞控板上增加了视觉Open MV传感器、激光笔、姿态传感器、超声波模块以及视觉图像智能分析算法协同作用来识别线缆、定高和测距。
1 巡线机器人硬件设计
基于四旋翼飞行器的巡线机器人的设计任务是通过四旋翼飞行器搭载视觉Open MV 传感器模块,对架空电力线缆及杆塔状态进行实时监测和监控,发现异常或故障时拍摄存储,当巡检任务结束后将巡检过程实时传送到地面显示装置上显示数据信息。飞行巡线机器人是一个相当复杂的控制系统,主要由飞行控制系统、姿态解算系统、图像采集系统、数据传输系统和地面数据分析系统等组成。飞行巡线机器人同时是一个欠驱动系统,由4 个输入来完成6 个输出的飞行控制系统[15]。工作原理是飞行控制处理器输出4 路PWM 波调整控制4 个电机的转速,从而改变两对相互交叉对称的旋翼转动和转向产生的上升力来实现各种飞行姿态。飞行巡线机器人硬件结构如图1 所示,主要由3 个单元模块构成,分别是四旋翼机架单元模块、飞行控制器单元模块和视觉传感器单元模块。
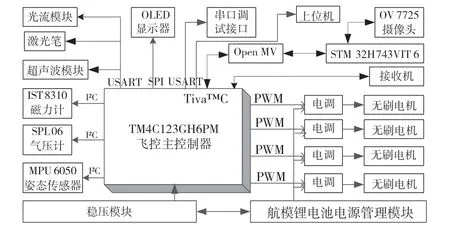
图1 飞行巡线机器人硬件系统框架
1.1 机架模块
作为飞行巡线机器人的主体构件,在设计方案中选择F330 铝制机架,轴距为330 mm,小巧轻便;机臂采用一体化注塑设计,可简化安装,降低共振,耐冲击。配合使用8045 螺旋桨(直径为8 英寸),同时选择2212 无刷电机和电调模块。相对于直流有刷电机来说,在运行时间和电压方面较稳定且标配稳压器,具备低干扰、低电损耗和低发热量等优点。电机的KV 值为930,较合适螺旋桨旋转(KV值越高,电机转速越快,力气就越小)。电调选择好盈乐天的20 A 电调,稳定且兼容性较好。飞行巡线机器人的供电由航模电源管理模块锂电池提供,选用LiPo-3S 电池,每块4.2 V,共12.6 V 电压。供电包含两部分,为飞控板和电机输送电源。由于飞控板的电压为5 V,锂电池的电压在11 ~12.6 V,所以需要一个降压稳压模块进行电压转换。
1.2 飞控模块
飞行巡线机器人的核心控制处理单元模块包括飞控主板、自主设计和绘制电路板。焊接如图2 所示的飞控主板。该四旋翼飞行器主控板可以实现一键起飞/降落、空中平衡定点光流悬停、SDK 开发者模式、自主寻迹模式以及自动追踪移动模式等。飞控模块由主控芯片、遥控通信模块、惯性测量模块、光流模块、电源供电模块和电机及驱动模块构成。其中,主芯片使用基于TI 公司的Tiva ™C 系列TM4C123GH6PM,其内部构造是基于ARM Cortex M4 的内核32 位处理器,主频高达80 MHz,包含256K 程序存储器和32K 的数据存储器、12 位高分辨率的DAC、12 个定时器Timer、串口多达8 路、I2C 通信接口多达6 路、PWM 输出多达16 路以及多路USART 接口。
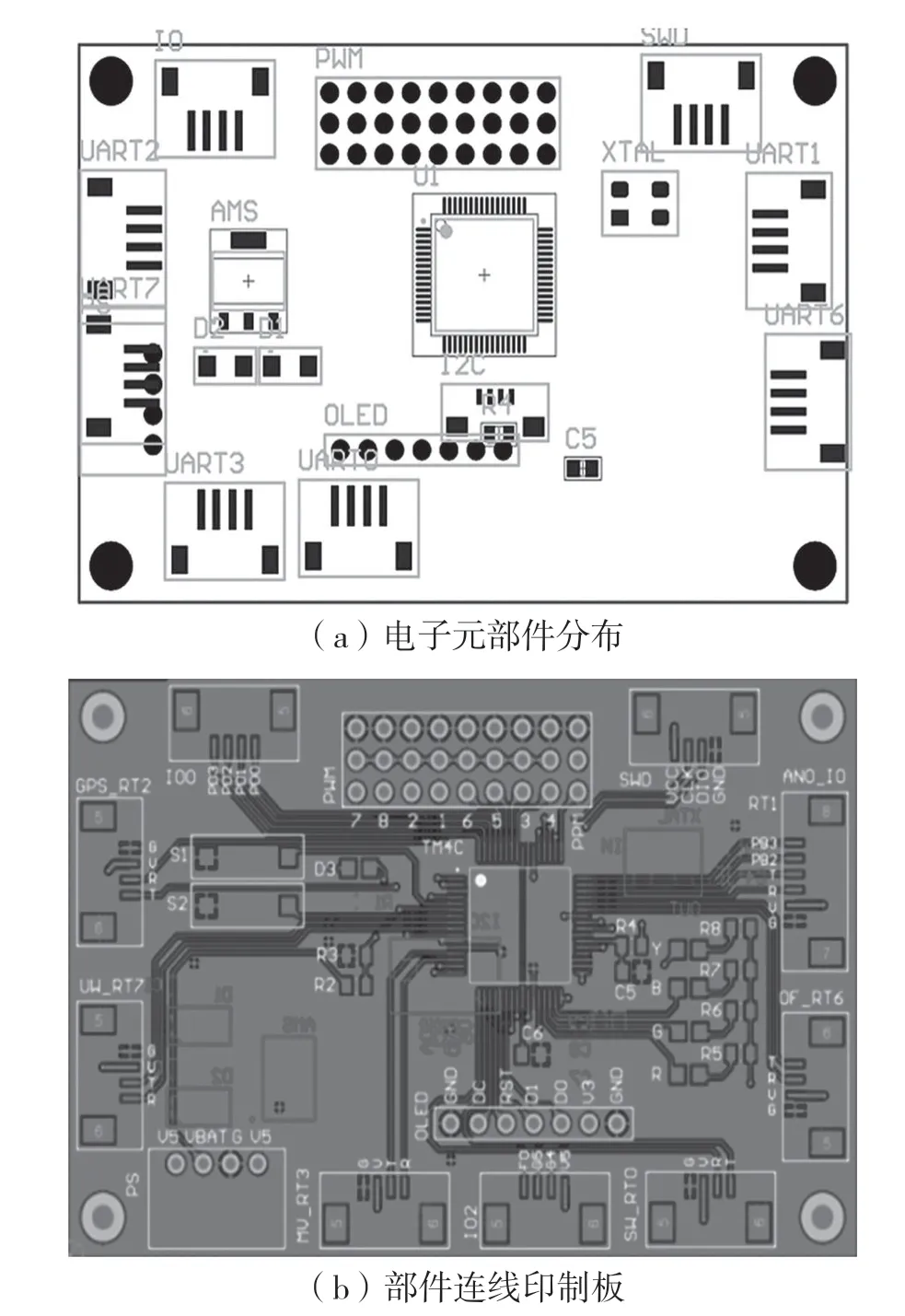
图2 飞行控制主处理器板
传感器部分由光流模块(定位悬停)、US-100 超声波模块(测高、测距,可实现探测距离为2 ~450 cm的非接触测距功能,具有串口等多种通信方式)、MPU-6050 姿态传感器(稳定飞行姿态,由加速度计和陀螺仪组成,前者主要测量加速度,后者主要测量转动角速度)、SPL06 气压计(与加速度计同时作用于定高,起飞前需要校准)和IST8310 磁力计组成。其中,光流模块和超声波模块通过USART协议与飞控主板通信,MPU6050 姿态传感器、磁力计和气压计通过I2C 总线协议与飞控主板通信。
1.3 视觉模块
作为飞行巡线机器人的视觉图像传感器模块,主要由Open MV 模块组成。Open MV 模块打造的是一款低价位、可扩展、支持Python 编程调用图像处理算法的机器视觉传感器,包含STM32H743VIT6芯片和OV7725 摄像头。这款芯片使用ARM Cortex M7 的处理器,所有的I/O 口均可用于中断和PWM,且所有的I/O 引脚输出3.3 V 和5 V 兼容。OV7725 摄像头在80FPS 下可处理640×480 分辨率8 bit 灰度图或320×240 分辨率16 bit 彩色图。飞行巡线机器人完成巡线任务(包含电力线缆上异物检测和杆塔二维码识别拍照),主要依靠如图3 所示的超声波模块、Open MV 模块、MPU-6050 传感器和光流模块进行图像和数据采集处理。
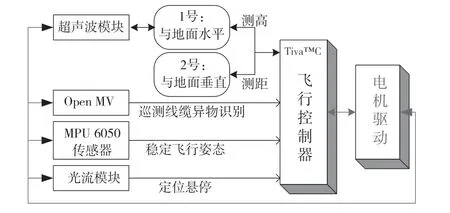
图3 飞行巡线机器人视觉传感器结构
下面主要对超声波模块和Open MV 模块进行详细概述。
(1)超声波模块。飞行巡线机器人要以1 m 定高绕杆A 至B 逐一巡检,且巡线区域为±60 cm,飞行最大轴间距不大于420 mm。飞行期间既要保证高度,又要防止飞出巡线区域。因此,将Open MV 模块安装在分电板两侧,即机头方向,分电板前后侧各安装一个超声波模块。前侧与摄像头保持水平,后侧与地面保持水平,巡线期间机器人沿线缆横向飞行。
(2)视觉Open MV 模块。该传感器模块主要是对输配电网络电缆和杆塔进行拍照录相,而杆塔及电缆是架空电路中包含的主要成员。在飞行巡线机器人飞行巡检过程中,电缆和杆塔的正确识别与定位是视觉传感器的首要任务。在视觉传感器模块中,通过数字图像处理技术计算和判断识别成功率,图像处理算法在本文不加以讨论。电力线缆上粘贴有圆环状的黄底黑色8 位数条形码,飞行巡线机器人在巡线期间要求机器人发现线缆上异物,并在与异物距离不超过30 cm 的范围内用声音或灯光提示报警。考虑到机器人起飞后螺旋桨转动的噪声杂音较大,如果安装蜂鸣器进行声音提示很大程度会影响飞行实验结果,听不到声响报警。所以,采用灯光提示,设置两个LED 灯(蓝色和绿色)依次闪亮。LED 灯的亮度较大,提示对线缆或杆塔识别比较明显。
2 巡线机器人软件设计
巡线机器人软件设计部分是采用C语言在MDK5软件上编写飞控主程序,并在TM4C123GH6PM芯片上下载和调试实现;视觉传感器模块程序是在Open MV 软件上采用Python 语言开发实现线缆和杆塔数据采集的分析和计算。巡线机器人在空中执行巡线任务的技术路线如图4 所示。为了让飞行巡线机器人一键起飞后连贯地执行赛题要求的各项动作任务,在主程序中设定了针对赛题要求进行分段分时飞行。

图4 飞行巡线机器人软件系统结构
飞行巡线机器人的飞控系统主程序部分核心代码:
int main(void)
{
WP_Init();//芯片资源、飞控外设初始化
while(1)//主循环
{
Get_Battery_Voltage();//测量电池电压
Key_Scan(Key_Right_Release);//按键扫描
QuadShow();//OLED 显示
Vcan_Send();//山外地面站
ANO_SEND_StateMachine();//ANO 地面站发送
Accel_Calibartion();//加速度计6 面校准
Mag_Calibartion_LS(&WP_Sensor.mag_raw,Circle_Angle);//磁力计椭球校准
RC_Calibration_Check(PPM_Databuf);//遥控器行程校准
Save_Or_Reset_PID_Parameter();//运用地面站,修改控制参数
}}
根据电子竞赛赛题给出的多项飞行任务要求,本文设置一个游戏模式来控制飞行巡线机器人在巡线过程中的相关动作。
(1)定高飞行。这是四旋翼飞行器保持巡线检查前最重要的环节。赛题设定线缆的高度为1 m,在飞行巡线过程中通过Open MV 模块不断检测线缆在视野中的位置,同时设置一个关键性标志,给光流发出指示动作来控制飞行巡线机器人的速度。如果飞行巡检视野中没有检测到线缆异物或是杆塔物体,则飞行巡线机器人保持悬停状态,自动进入高度调整控制,停止速度控制。此时,需要知道线缆高度。设定Left 为上方有线,值为+1 cm 到+3 cm;Right 为下方有线,值为-1 cm 到-3 cm。通过检测线缆的高度判断飞行巡线机器人下一步的飞行姿态,即向上飞行使线缆出现在视觉传感器摄像头的中间或者自动调整机身向下飞行时使线缆居中。
(2)检测线缆上是否存在异物并提示。异物是黄色管状物体,而线缆是黑色,所以检测异物即色块识别,用到了Open MV 模块中的find_blobs函数来寻找色块,通过设置pixels_threshold=25 和area_threshold=25 过滤识别到的一些干扰点。这些干扰点的像素值和面积均小于25,可以很好地识别色块。识别到异物报警时,用到了2 号超声波模块(与地面垂直放置)来检测飞行器与线缆之间的距离。当超声波模块检测到距离小于30 cm 时,调用alarm()函数发出警报,通过延时来控制蓝色和绿色两个LED 灯光闪烁,同时要关闭速度控制,保持飞行巡线机器人悬停姿态,立即进行条码识别与拍照存储。
(3)条码识别。由于条形码贴在黄色管物体块上,认为仅需要识别出异物并拍照便可得到条形码图片。条码识别步骤如下。
步骤1:设定异物颜色阈值,设定常量值t=7;
步骤2:利用find_blobs 方法,输入异物颜色阈值、最小色块像素、最小色块面积等参数,并过滤掉条形码,从而识别色块,调用blob.cx()方法和blob.cy()方法得到色块在窗口的横坐标,最后利用for 语句遍历所有异物颜色色块;
步骤3:通过条件筛选出异物,得到异物横坐标和纵坐标;
步骤4:当检测到异物的横坐标在x 轴的中间部分时,t-1,flag1 置1;
步骤5:将条形码坐标和flag1 返回,此时t 自减,当取值为3、2、1 时,调用save 方法拍照并依次将图片保存进SD 卡;
步骤6:当t 自减至0 时,不再进行异物识别判断,不再拍照,从而控制照片数量为3,flag1 置0 返回;
(4)二维码识别。由于二维码存在许多关键点,认为可以将需要识别的二维码特征点提前保存并通过特征点检测便可识别出二维码。
步骤1:将要检测的二维码特征点提前保存,设定常量值q=7;
步骤2:利用load_descriptor 方法读取sd 卡内的特征点,存入kpts1;
步骤3:利用find_keypoints 方法寻找特征点存入kpts2;
步骤4:利用match_descriptor 方法将kpts2 与二维码的特征点相匹配;
步骤5:设定条件语句,当相匹配的特征点个数超过设定的个数时为匹配成功,此时返回检测对象的坐标;
步骤6:当检测对象进入镜头中间时,flag2 置1,调用save 方法将图片保存进SD 卡,q-1 直到q=0时不再拍照,从而控制照片数量,flag 置0 时返回;
(5)绕杆塔飞行。飞行巡线机器人绕杆塔飞行需要考虑两个因素:一是检测到杆塔B;二是巡线机器人绕过杆塔B。巡线机器人检测到杆塔B,需要视野中上、下、左三侧呈现有线缆的现象。对于视觉Open MV 模块来说,是Left、Right、Up 三个参数为1。绕过杆塔飞行需要在保持飞行高度的情况下不断调整横滚的速度和偏航的角度,即调整横滚和偏航的参数实现绕过杆塔B 继续呈直线飞行巡检。
3 实验测试与分析
本文设计制作的飞行巡线机器人如图5 所示。根据2019 年全国大学生电子设计竞赛试题要求,为解决架空输电线路人工巡检存在的困难现状,团队在比赛现场进行了方案论证、飞行设计和飞行实测。
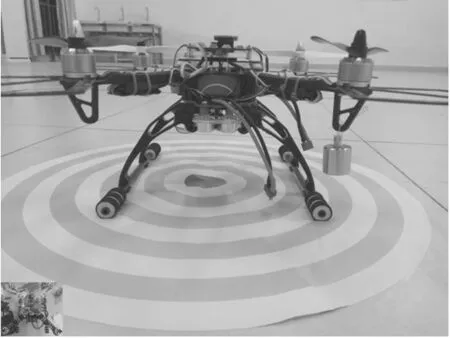
图5 飞行巡线机器人
按照全国竞赛赛题飞行测试任务要求,设计的飞行巡线机器人沿着图6 杆塔与线缆测试图进行了6 项试验,成功完成了赛题基础部分3 项和发挥部分3 项(①、②和④项)的飞行实测,如表1 所示。

图6 实验测试杆塔与线缆示意图(摘自2019 竞赛试题)
针对赛题任务以及架空线缆巡检环境繁杂,本设计硬件系统结构简洁,按赛题选项每一单项重复巡检测试飞行3 次,最后取飞行平衡、效果最佳的一次作为最后实验成绩。机器人设备在巡线巡检飞行中全程飞行平稳,唯一有两个单次飞行巡检测试失败,两单次条形码/二维码未正确识别。可见,本文设计提出的飞行巡线机器人飞行测试实时性和精准性较高,并取得了2019 年贵州赛区两项二等奖和一项三等奖。实验结果表明,飞行巡线机器人系统的鲁棒性、实时性、可扩展性以及可移植性得到了有效论证。
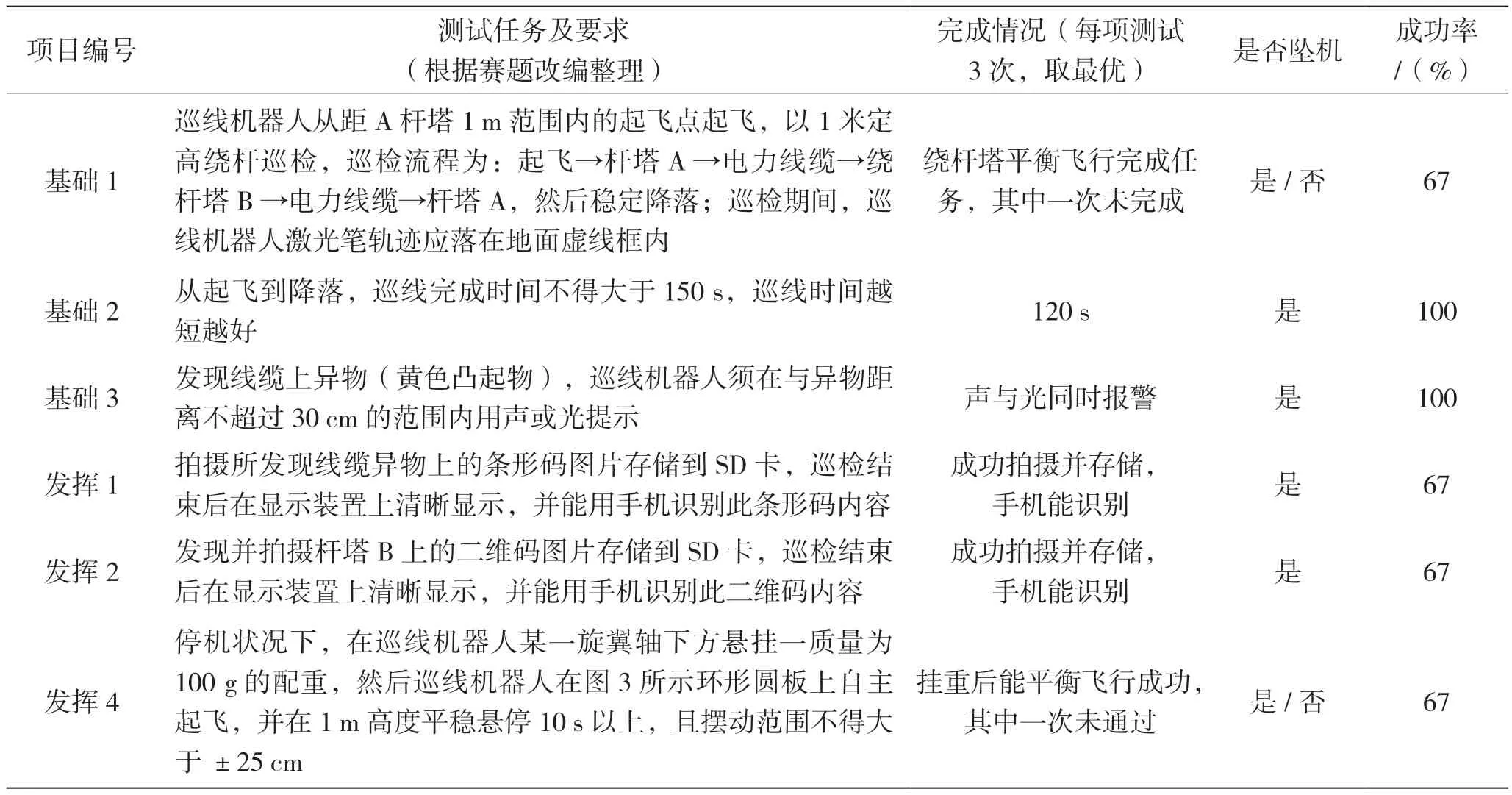
表1 飞行实测表
4 结 语
本文提出一种飞行巡线机器人的设计方法,自主设计与绘制四旋翼飞行控制器主板,详细阐述了四旋翼飞行器搭载视觉Open MV 传感器模块、光流模块、超声波模块以及MPU-6050 传感器模块在TI公司Tiva ™C 系列TM4C123GH6PM 主控芯片上实现飞行巡线巡检方案,采用图像处理技术算法处理自动飞行巡检功能。在软件系统设计方面,采用通用的C&Python 语言程序协同开发并执行巡线机器人在巡线巡检过程中的定高、测距、线缆检测异物、条形码/二维码识别等任务。现场比赛和飞行实测,验证了本文设计的飞行巡线机器人的综合性能。这种设计方案降低了人工巡检架空输配电网络电力线缆和杆塔的危险性,提高了工作效率和巡检质量,为智能巡检机器人提供了一种新的参考方案。
猜你喜欢
卫星应用(2022年1期)2022-03-09 06:22:30
中国电业与能源(2021年4期)2021-05-22 00:39:42
广西电业(2020年11期)2020-03-23 07:14:14
汽车电器(2019年9期)2019-10-31 07:51:08
电子制作(2019年11期)2019-07-04 00:34:36
无人机(2018年1期)2018-07-05 09:51:06
现代防御技术(2016年1期)2016-06-01 12:13:27
电测与仪表(2016年23期)2016-04-12 00:23:14
中国品牌(2015年11期)2015-12-01 06:20:54
电测与仪表(2015年3期)2015-04-09 11:37:48
