
动基座条件下舰载武器捷联惯导系统初始对准研究
2020-04-21 07:40陈春歌刘文超
数字技术与应用 2020年1期
陈春歌 刘文超


摘要:由于舰船的航行环境及自身机动运动对舰载武器的初始对准精度有直接的作用影响。本文分析了几种常用初始对准方法,并建立速度匹配法传递对准卡尔曼滤波器模型,对舰船几种典型机动方式下的模型进行了仿真研究。结果表明,舰船不同机动运动方式下对准效果改善程度不同,速度匹配法传递对准能实现动基座条件下的舰载武器捷联惯导初始对准功能。
关键词:初始对准;速度匹配法;机动运动;艦载武器
中图分类号:TN966 文献标识码:A 文章编号:1007-9416(2020)01-0219-04
随着惯性器件的应用和惯性导航技术的发展,舰载武器中也越来越多的应用到惯性制导技术,惯性导航的精度将直接影响到武器的打击能力。初始对准是进行导航计算的基础,初始对准的精度是影响舰载武器惯性导航系统性能的重要因素。舰载武器的初始对准可以利用已经对准好的主惯导信息来对准子惯导信息,分为粗对准和静对准过程。由于舰船在海上航行,运行环境复杂,舰船壳体也经常因波浪撞击产生摇摆震动以及变形等,将直接影响到子惯导的加速度、角速度测量精度,文献[1]中研究,舰船杆臂效应误差引起的系统水平对准误差可达2°~3°,目前常用的初始对准方法有:测量参数匹配法、计算参数匹配法,由于舰船杆臂效应、挠曲变形误差的存在,对测量参数的影响不容忽视,因此常采用计算参数匹配法,计算参数匹配法按照参数的不同又可分为速度匹配法、姿态匹配法、速度+姿态匹配法。由于主惯导与子惯导信息传输过程中存在延时,文献[2]中认为数据传输延时在舰船机动时主要产生方位误差,对速度的影响不大,但是对姿态影响较大。舰载武器初始对准要求机动条件下对准时间短、反应快、鲁棒性好,因此综合以上因素,在舰载武器捷联惯导系统传递对准中常采用速度匹配的方法。
本文基于捷联惯导速度匹配传递对准,深入分析了舰船的不同机动运动状态对舰载武器捷联惯导系统传递对准性能的影响情况。
在推导速度匹配传递对准的数学模型之前,先定义本文用到的基本坐标系如下:
g—地理坐标系,原点为载体重心,采用东北天坐标系;
n—导航坐标系,惯导系统导航解算时的坐标系,与地理坐标系一致;
c—计算导航坐标系,与理想导航坐标系之间的夹角即为惯导系统初始对准的失准角φ;
e—地球坐标系,与地球固联,相对于惯性坐标系以地球自转角速率转动;
—惯性坐标系,原点在地球中心,相对于恒星无转动;
b—载体坐标系,原点在运载体重心,与运载体固联。
地理坐标系与载体坐标系之间的转换关系如下,由于本∪〉己阶晗涤氲乩碜晗狄恢?所以有[4]:
4.3 仿真结果分析
由上,对不同机动方式下的对准效果总结如下:
(1)系泊状态。即摇摆状态下,水平误差角20s左右即可估计出来,东向误差角估计误差约为8",北向误差角估计误差约为15",而方位误差角估计时间较长,350s后估计误差约为2.5";东向速度误差、北向速度误差约20s后迅速收敛至零。
(2)匀速直线运动状态。舰船作匀速直线运动状态下,东向、北向水平误差角约10s左右估计出误差角,东向误差角约2",北向误差角(2)匀速直线运动状态。舰船作匀速直线运动状态下,东向、北向水平误差角约10s左右估计出误差角,东向误差角约2",北向误差角估计误差约15",方位误差角同系泊状态估计时间较长,350s后估计误差约为5";东向、北向速度误差约20s后收敛至零附近。该运动状态下对准效果与系泊状态下基本一致。
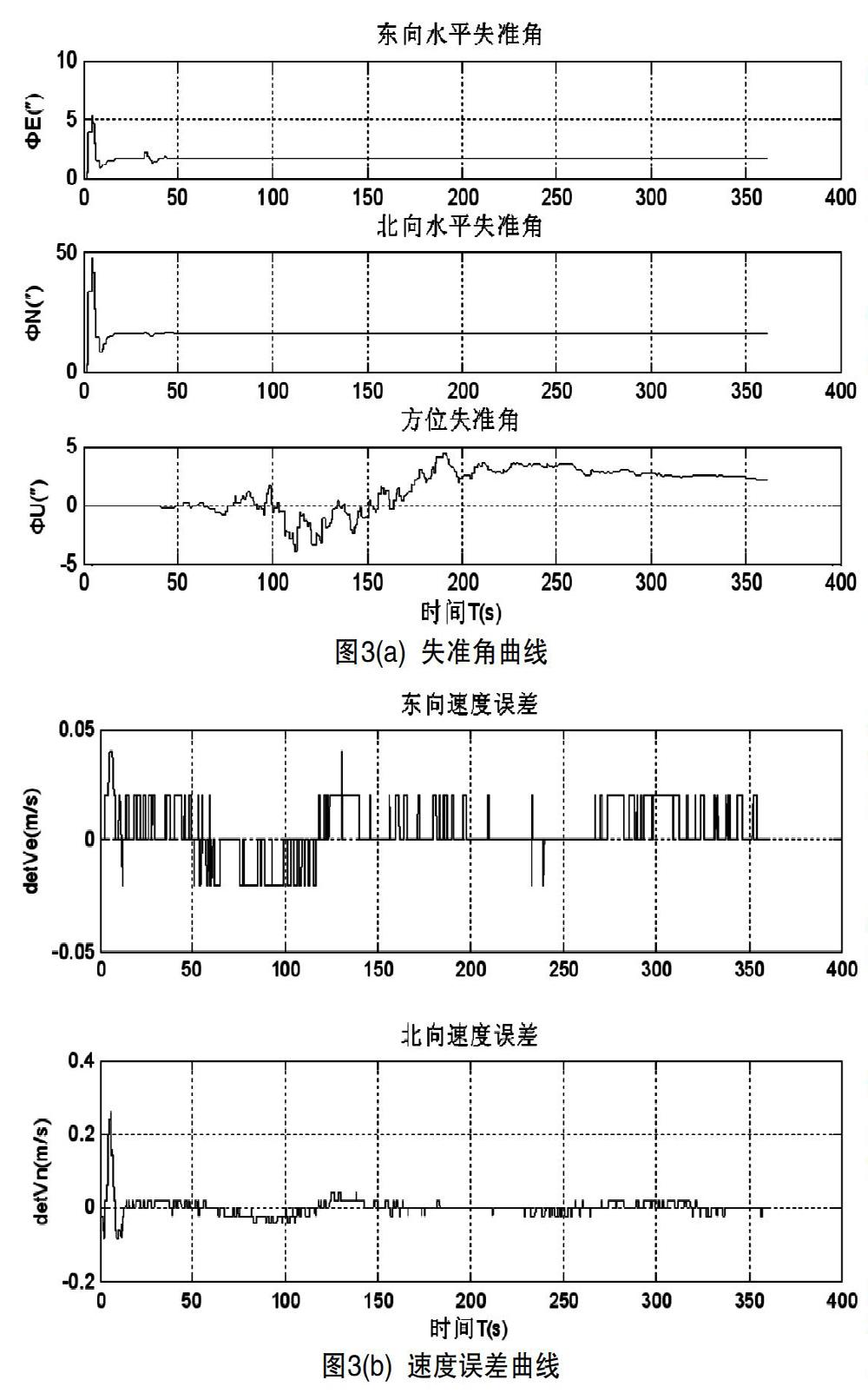
(3)匀加速运动状态。舰船作匀加速直线运动状态下,东向、北向水平误差角约10s左右估计出误差角,东向误差角约2",最大失准角约为5",北向误差角估计误差约15",最大失准角约为50",方位误差角同样估计时间较长,350s后估计误差约为2.5";东向速度误差在-0.025m/s~0.04m/s范围内变化,北向速度误差约20s后由0.25m/s收敛至零附近变化。
(4)匀加速加摇摆运动状态。舰船作匀加速加摇摆运动状态下,东向、北向水平误差角约10s左右估计出误差角,东向误差角约10",最大失准角约为30",北向误差角估计误差约5",最大失准角约为15",方位误差角同样估计时间较长,350s后估计误差约为3";东向速度误差在-0.02m/s~0.02m/s范围内变化,北向速度误差约20s后由0.18m/s收敛至零附近变化。
本文建立了舰载武器捷联惯导系统采用速度匹配法的动基座传递对准滤波器模型,并以此为基础对舰船不同机动方式下的对准精度、对准时间及速度误差估计进行了仿真分析和结果比较。结果表明,在文中几种机动运动状态下均可在短时间内估计出水平误差角和速度误差,通过线加速运动可提高陀螺漂移的估计精度,但是对北向速度误差有一定影响,对准时间和对准精度均能满足要求,采用速度匹配法能实现子惯导的对准功能。
[1] 张德明.舰载武器惯导系统初始对准技术研究[D].沈阳:沈阳理工大学,2011.
[2] 刘红光,陈志刚,陈刚.基准信息时间延迟对速度匹配传递对准性能的影响分析[J].中国惯性技术学报,2012,20(5):544-551.
[3] 秦永元.惯性导航[M].北京:科学出版社,2006.
[4] 杨功流,王丽芬,袁二凯,等.大方位失准角下舰载机快速传递对准技术[J].中国惯性技术学报,2014,22(1):45-50.
[5] 万德钧,房建成.惯性导航初始对准[M].南京:东南大学出版社,1990.
