
基于激光测距的便携式汽车无线充电系统
2020-04-20 11:06汝玉星丁佳新丁泽莹田小建邓军
时代汽车 2020年3期
汝玉星 丁佳新 丁泽莹 田小建 邓军

摘 要:无线充电是现阶段发展快速的充电模式,为了提高不良环境下电动汽车的充电效率,本文提出一种基于激光测距的便携式汽车无线充电系统。以电动汽车为模型,利用激光测距进行距离信息估计,找到最佳距离以提高充电效率。在电路设计的基础上,采用电机控制模块、激光测距模块、整流滤波电路模块、降压电路模块、高频逆变电路模块、反馈电路模块等,并对未来基于激光测距的无线充电技术进行了总结和展望。
关键词:激光测距;无线充电;万向调平
1 引言
研究电动汽车的无线供电,不仅要研究如何为汽车供电,还要研究如何最大效率完成充电。无线充电可分为小功率无线充电和大功率无线充电,大部分的电动汽车使用大功率无线充电。自1890年,在伟大的物理学家特斯拉开始进行无线传输试验后,后人就开始了无线传输的研究。2007年,麻省理工学院的一个研究小组实现了电力的无线传导。汽车无线充电可以避免繁杂的充电线带来的困扰,实现随时充电,携带方便的功能。
本文研究自适应电动汽车无线供电移动平台,利用激光测距技术解决了对于在某些不良环境下不能满足与车底保持平行的问题。这样就基本满足无论汽车所在的路面是否平整,都可以满足高效率充电。
2 无线充电
汽车无线充电技术利用电磁耦合,利用两个电路之间存在互感的关系,通过一个电路的电流产生变化来影响另外一个电路,以此来达到无线传输。无线充电系统包含两个部分,分别为发射部分和接收部分。以电动汽车为例,发射部分位于便携式充电装置上,接收部分位于电动汽车的底部。便携式充电装置的发射部分接入电源,通过设计电路,经过一系列电能的转化和传输,最终在发射部分形成高频的交流电,交流电以此产生交变的磁场,并在汽车底部的接收线圈端感应出交流电流,最终经过整流产生直流电流来给电动汽车充电。
3 万向调平装置的设计
3.1 总体结构的概述和设计
如下图所示:
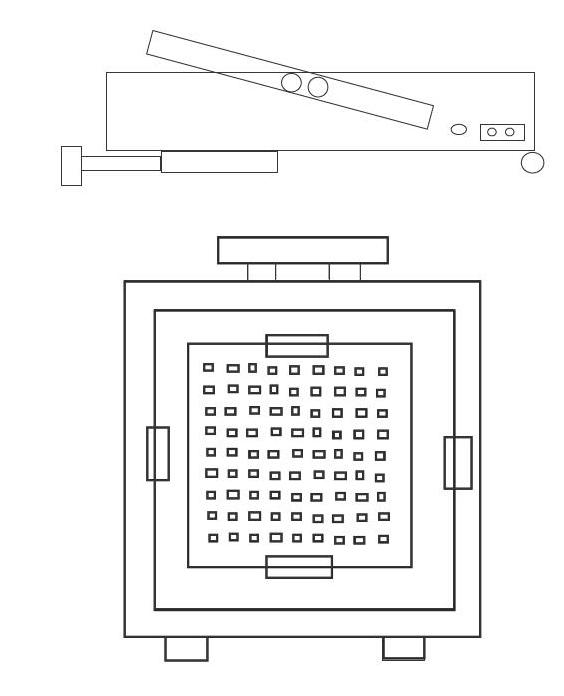
3.2 内旋壳、外旋壳的设计
外环壳体是嵌在装置底座中的空心扁方环柱体结构,内旋转壳体是嵌在外环壳体内部的扁方柱体结构,外环壳体和内旋转壳体高度相同,且初始状态时上表面共面,内旋转壳体的上表面形状为正方形,下表面的外围形状、周长均与上表面的相同,但中心为圆形镂空,镂空位置正下方装有风扇;外环壳体的两个相对的外侧面的中心处有参数相同的第一承重旋转轴和第二承重旋转轴,第一承重旋转轴和第二承重旋转轴能够带动外环壳体在装置底座中旋转,内旋转壳体的两个相对的外侧面的中心处有参数相同的第三承重旋转轴和第四承重旋转轴,第三承重旋转轴和第四承重旋转轴能够带动内旋转壳体在外环壳体中旋转,第一承重旋转轴和第二承重旋转轴的中心轴线在一条直线上,所在直线记为直线A,第三承重旋转轴和第四承重旋转轴的中心轴线在另一条直线上,所在直线记为直线B,直线A与直线B垂直相交;在外环壳体的上表面有第一激光测距模块、第二激光测距模块,内旋转壳体的上表面有第三激光测距模块、第四激光测距模块;其中第一激光测距模块和第二激光测距模块的参数相同,它们的中心连线记为直线C,直线C与直线A垂直;第三激光测距和第四激光测距模块的参数相同,它们的中心连线记为直线D,直线D与直线B垂直;内旋转壳体的上表面和装置底座的下表面均有散热孔;所述的市电接口和工作指示灯位于装置底座的外侧面,无线电能发射线圈位于内旋转壳体的内部且其上表面与内旋转壳体的上表面平行且中心重合。内外嵌套双旋转的结构,可以实现万向调节功能。其详细结构如下图所示:
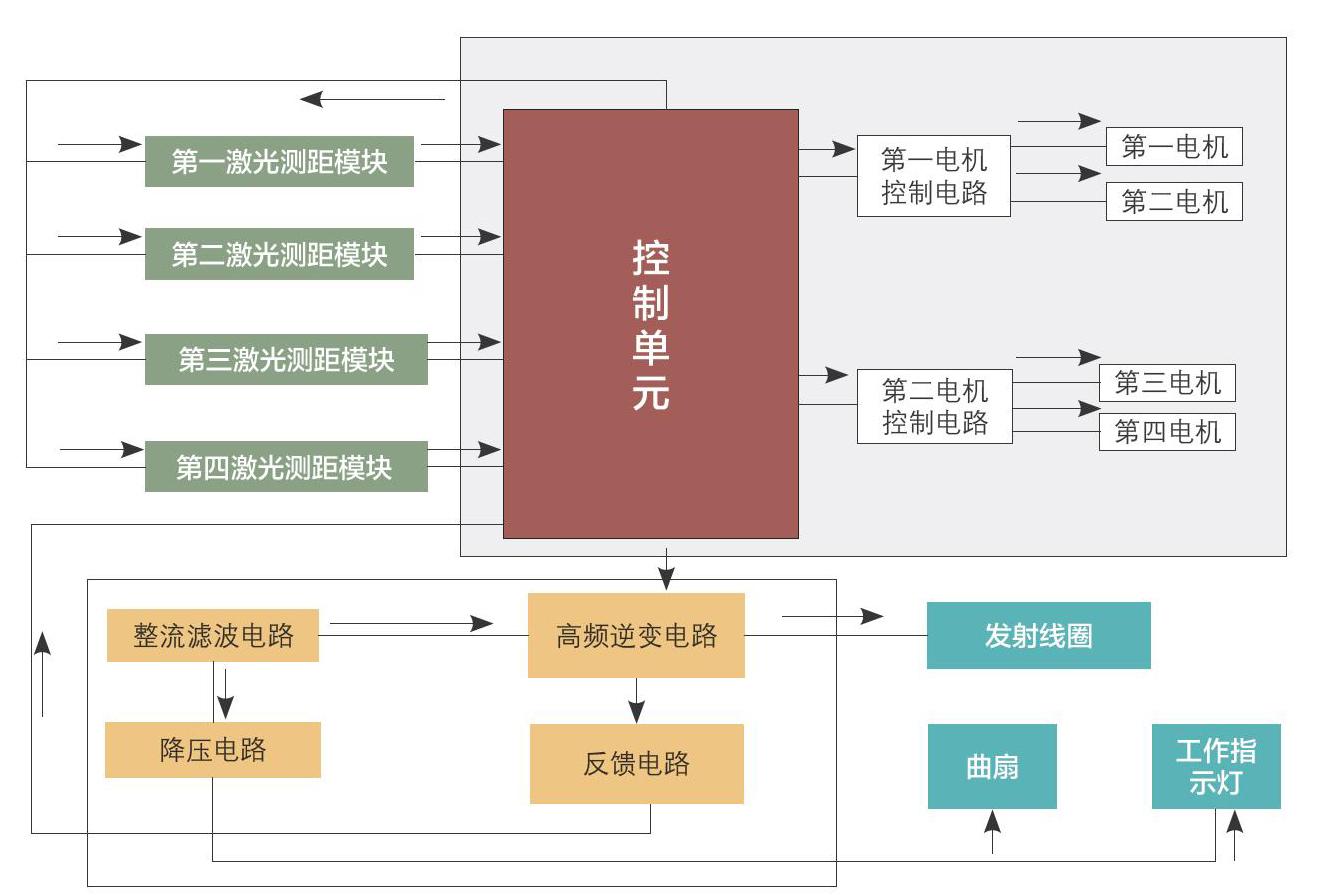
3.3 控制单元的设计
控制单元的设计目标是平台通电以后,控制单元同时给四个激光测距模块输出驱动方波信号,位于外环壳体上的第一激光测距模块、第二激光测距模块收到驱动信号后,两激光发射探头同时发出光束信号,在由各自模块中的接收探头接收反射光束信号,两信号经过放大、脉冲整形、带通滤波,最终由模块输出到控制单元。输入到控制单元中的两信号经过时间测算等运算处理后,在控制单元与第一电机控制电路相连的I/O口上得到四个不同的信号,进而控制第一电机、第二电机的正传、反转、停转。
4 激光测距模块的设计
如果平台初始状态就与车底面平行时,即这对激光测距模块的激光头表面到达车底面距离相等时,控制单元的I/O口输出00状态,进而负责带动第一承重旋转轴和第二承重旋转轴的第一电机、第二电机不工作;当第一激光测距模块的激光头表面到达车底面距离大于第二激光测距模块的激光头表面到达车底面距离时,该I/O口输出01状态,第一电机控制电路接到信号后,控制第一电机、第二电机正转,进而第一电机、第二电机负责带动的第一承重旋转轴和第二承重旋转轴正转工作,直到这对激光测距模块激光头表面到达车底面距离相等时,I/O口输出00状态,第一电机、第二电机带动第一承重旋转轴和第二承重旋转轴停转;当第二激光测距模的激光头表面到达车底面距离大于第一激光测距模的激光头表面到达车底面距离时,该I/O口输出10状态,第一电机控制电路接到信号后,第一电机、第二电机反转,进而带动第一承重旋转轴和第二承重旋转轴反转工作,直到对激光测距模块激光头表面到达车底面距离相等时,I/O口输出00状态,第一电机、第二电机带动第一承重旋转轴和第二承重旋转轴停转;通过上述工作过程,本发明平台就实现了外环壳体水平角度的变化,也就实现了内旋转壳体跟随外环壳体的一次水平角度变化。
5 外观的设计
采用的是无线可移的拉箱式结构,这样可以使得本发明便携灵活能应付各种环境。其详细结构如下图所示:
6 总结与未来
为解决不良环境下给电动汽车进行充电时,存在的充电效率较低的问题,在基于激光测距的基础上开发了便携式汽车无线充电装置,以此来提高电动汽车的充电效率。首先设计出总体结构模型,采用内外嵌套双旋转的结构,可以实现万向调节功能,大大提升装置的电能传输效率;采用激光测距方式来测量距离,确保其精确度;发射线圈采用蜂房式的绕制方式,可以有效抑制线圈寄生电容。除此之外,外观上采用的是无线可移的拉箱式結构,这样可以使得本发明便携灵活能应付各种环境。与传统的充电方式相对比,所提出的系统在电动汽车的充电效率以及适用的环境条件方面具有明显的优越性。未来将继续对基于激光测距的便携式汽车充电系统进行研究,争取进一步对该系统进行优化。
课题:长春市技术创新中心资助项目“长春市电动汽车无线充电技术创新中心”,编号18CX001。
参考文献:
[1]李忠宝,刘宝松,刘月浩.基于激光测距技术的往复车精准定位应用.电工技术,2019年第24期.
