往复式海浪发电系统力学分析
2020-04-18 06:17:46杨钧达陈卫兴谢敏怡刘俊笙房伟权胡佩菊
科学技术创新 2020年6期
杨钧达 陈卫兴 谢敏怡 刘俊笙 房伟权 丁 南 胡佩菊
(广州工商学院 电子信息工程系,广东 广州510850)
在地球的整体面积中,海洋占据了其中的71%。而我国也拥有着绵长的海岸线,汹涌起伏的海浪蕴藏着无尽的能量。了解分析本实验物中系统的力学特性,改善浮子和曲柄杆各参数有利于提高系统得发电能利用率。为了改善这种状况,本文有必要进行该系统的运动学分析和动力学分析。
1 系统的组成
本文系统模仿发动机活塞运动原理,如图1 所示,该往复式海浪发电系统由浮子、传动轮组件、曲柄连杆、变速齿轮、三相交流发电机、整流器等组件构成。利用运动模块的浮子部件在水流中通过质点的简谐振动形成动能,海浪起伏能产生势能,由传动系统的振动特性、发电机电磁感应现象原理、杠杆、弹性力学、三相稳压技术等多个物理模块结合,从而将海浪能转换成电能。
2 系统分析
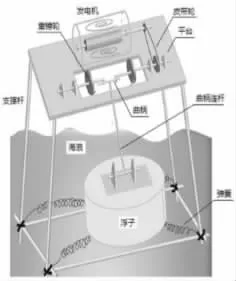
图1 往复式海浪发电系统结构图
海流和海浪共存于海水中,其中海流是在水平方向或者垂直方向上从一个地区向另一个地区大规模非周期性的运动。其产生是外力作用下的运动,如在海平面上的风力引起的海流称之为风生海流,也称为漂流。海浪主要是在海洋中由风产生的波动现象,不同风速、风向和地形条件下,海浪的尺寸变化很大,波长从几十厘米到几百米之间。由于海流与海浪相比其运动方向比较稳定和缓慢,研究对象体积较小,所以本文分析时忽略海流对系统的影响[1]。
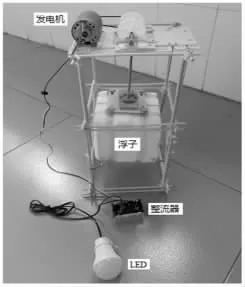
图2 往复式海浪发电系统实物图
2.1 海浪动力学分析。海面上常见的海浪一般可用不规则波来描述,波浪的运动在水中产生动压力,其强弱与波幅大小有关。该系统主要运动部分在浮子处,水平方向上的动力能相抵消,动能主要作用于浮子的上下底面。下面主要研究海况下浮子下底面的动力特性,由文献[2]可知

式中ξa为自由水面的波幅,表自由水面波动液体每一质点沿圆形轨道匀速运动,为水深T处的波幅,波数为波长)。从流体力学得知,波幅随水深按指数关系减小。
漂浮物相对于O-XYZ坐标系有六个自由度运动,由于漂浮物在波浪上的横摇运动,纵摇运动和升沉运动较其他分量的震荡运动显著,本系统中浮子横波是为相向动压力大小相同,因此只考虑浮子在规则波中的纵摇和升沉运动。考虑到海浪中动压力梯度和静压力梯度不同经过史密斯修正系数修正后的波型坐标使用切片法,横剖段与波面的垂向相对位移为

波动产生的等效波面方程可表示为[3]

作用在垂向运动的切片上的流体动力组成有流体静力、兴波阻力和附加惯性力,将各横剖段上的流体动力对x积分得到垂荡力F,则得到浮子垂直方向动力。
2.2 曲柄连杆动力学分析。曲柄连杆机构是利用海浪的往复运动实现工作循环,完成能量转换的传动机构,用来传递力和改变力的运动方向。工作中,曲柄连杆机构在做功过程中把海浪的上下往复运动转变成曲轴的旋转运动,对外输出动力,在海浪的起伏往复过程中又把曲轴的旋转运动转变成浮子往复起伏运动。因此,曲柄连杆机构是海浪借以产生并传递动力的机构,通过它把海浪的动能转变为机械能[4,5]。
如图3,曲柄连杆上面的重锤轮(重锤的转轮)增加了曲柄连杆的离心质量,令曲柄连杆可以获得更高的旋转离心质量,以减少曲柄连杆所需的旋转动能,令海浪往复起伏动能利用率达到更高。浮子产生的P 与连杆l 上所受的力Pc之间存在关系

且在结点A点处,曲柄方向上的力Pc和曲柄颈所受切线力PT关系

由转矩T为曲柄颈所受切线力PT与半径r 的乘积,即

联立式4、5、6 得:

在该系统中,曲柄半径r 远小于曲柄连杆L,φ 角趋近于零,即公式7 近似于

根据平面圆的分析及余弦定理得到P 与行程s 的关系

3 模拟真实发电环境测试
表1 是本实物系统在平静湖面经过人工制浪模拟环境测试得到参数:输出电压和电流,通过观测外接LED灯发光强弱进行比较功率大小。

表1 往复式海浪发电系统的实测数据

图3 曲柄杠机构结构图
实验结果表明:系统运行稳定,整流器输出直流电压随着人工制浪振动频率增大而以非线性凸曲线增大,输出的直流通过拟合方式发现以线性增大。
整个系统对结构材料有一定的要求,需要运动学分析计算出大致的受力,由于浮子在海浪中受到水质点对其的垂直方向的动力,利用海浪波动方程可以得到垂直压力,选取合适的结构材料。由于海浪情况的随机性和多变性,本文化繁为简,将无规则波动运动简化问规则运动进行参数设置并寻找修正系数,各参数的确定需要根据情况做改动。实验结果证明本系统在理论基础上还可以进行修正改善以提高能量传动效率。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:54:38
船舶力学(2021年3期)2021-03-29 10:06:52
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03 01:04:00
活力(2019年17期)2019-11-26 00:42:26
测控技术(2018年2期)2018-12-09 09:00:56
中国惯性技术学报(2018年4期)2018-11-08 10:56:40
上海大中型电机(2017年4期)2017-02-06 05:26:57
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
当代化工研究(2016年7期)2016-03-20 16:21:59
石油化工建设(2015年2期)2015-12-01 04:16:46