
全景摄录系统的设计与实现
2020-04-14 04:54乔轶
电脑知识与技术 2020年4期
乔轶

摘要:在工作中,高速運动物体和目标遭遇端是无人看管的环境,并且对所获取的图像的快速处理标准相对较高。基于此本文设计了一套具备360°监视视角的全景高速实况摄录系统。文中给出了系统组成以及工作流程,并对相机触发、图像处理、视频传输方面的关键技术进行了讨论。实验证明该系统完整获取了目标遭遇过程中视频信息,对目标遭遇段精准测量工作具有重要的现实意义。
关键词:图像传输;准实时;精确触发;环形成像;成像恢复
中图分类号:TP311文献标识码:A
文章编号:1009-3044(2020)04-0231-02
收稿日期:2019-11-21
Design and Implementation of Panoramic Video Recording System
QIAO Yi
(Team 43 Unit 91550,Dalian 116023,China)
Abstract:High-speed hitting target is unattended and requires high processing speed to obtain images.So we design a target ship's monitoring system which the visual angle is 360 degrees.In this paper,first introduces the system composition and work flow,then dis-cusses the key technologies of camera triggering s image processing and video transmission.Finally,through the experiment we prove that the system can acquire the video information during the target encounter process,which has important practical significance for the accurate measurement of the target encounter segment.
Key words:image transmission;pseudo-realtime;trigger precisely;Annular imaging;mage restoration
1 概述
实验测试中,该系统主要负责摄录工作,其为测试飞行器的各项性能指标提供技术支撑[1-2]。介于实际实验中,飞行器的最终落点难以预测,这就需要摄录设备在摄录范围为整个遭遇区域。为了满足拍摄范围要求,通常同时设置多个摄像机进行拍摄。本文采用全景成像技术[3],使用一台摄像机,就可满足对整个遭遇区域的全视场观测要求[4]。高速运动目标和目标遭遇过程可以表现出整个实验的各种性能,因此它的图像信息的实时采集以及传输,在对运动物体实时飞行姿态、遭遇点精度判断以及实验结果的有效性判定等方面起到了关键性作用[5]。
2 设计方案
2.1 系统组成
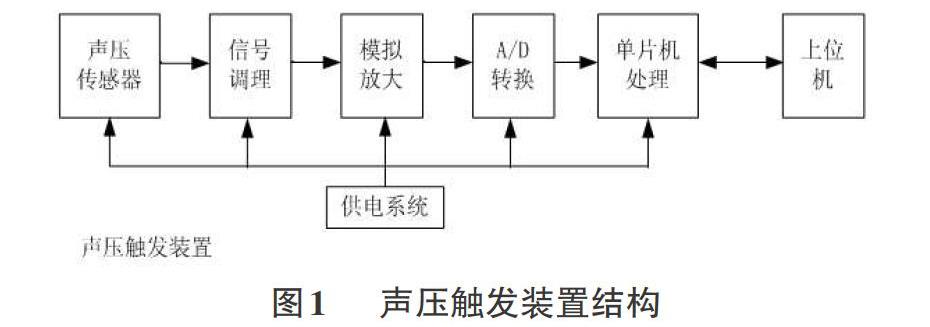
该系统主要用来实现遭遇点周围全方位成像,完成实验视频图像的获取和传输。主要由视频记录系统、遥控地面站和图像处理系统组成。摄录系统主要由高速摄录机以及摄录机的控制单元,声触发单元、图像数据存储单元等[6-7]。地面站由遥控站主机、监控系统、视频格式转换器及相对应的馈线等构成,用于实现摄录系统的远程遥控,同时对整个系统地实时运转、工作状态进行不间断监控;图像数据处理单元由图像控制系统以及实时处理软件等组成,主要用于实现对实验图像的解析、处理及传输显示工作[8-9]。
2.2 工作流程
实验中,该系统布设于目标遭遇点一定距离内,通过4 Mb/s无线信道完成其和地面间的通信工作。当飞行器出现在测试区时,系统利用空气摩擦以及遭遇时刻产生的强声压信号触动摄录系统开始工作,地面站完成所有监控后,依据声触发时段选取一段连续图像,并开启编码压缩以及图像汇编工作,接收高速慢放视频并发送到指定位置。
3 成像系统技术实现
成像系统主要由双曲面反射镜、高速CMOS相机和全景取景器等组成[10]。电缆和光纤使用NI公司基于Channel Link技术开发的总线协议,有效地解决了相机与其图像采集卡之间高速通信的问题。双曲面反射镜用来完成对遭遇段物体的成像作用,使相机达到实验所需可视视场的范围。
3.1 摄录系统的触发
本文中使用拍摄帧率≥500fps,分辨率≥1024x1024的摄录系统,假设目标从视场到遭遇段需要100ms,则得到的高速图像帧的数量是50帧。手动操作无法达到如此精确的控制要
求,并且针对实际工作中对实时性的较高要求以及图像识别法:的复杂性,因此只能依靠外触发控制。
在实验中,当处理高速运动目标的声学特性数据时,发现在运动期间遭遇点处产生的声压信号强度要大于空气摩擦产生的声压信号,空气摩擦产生的声压信号要远远大于背景噪声,且遭遇点处的声压信号稳定、易于识别。综上所述,本系统使用基于声压的触发控制单元触发摄录系统,此外该系统还具有自动识别目标遭遇时刻的功能。
3.2 图像处理
(1)图像的柱面展开
为实现对飞行物体在遭遇段实况的详细分析,需要对获取的图像进行图像处理,以获得更多的信息。
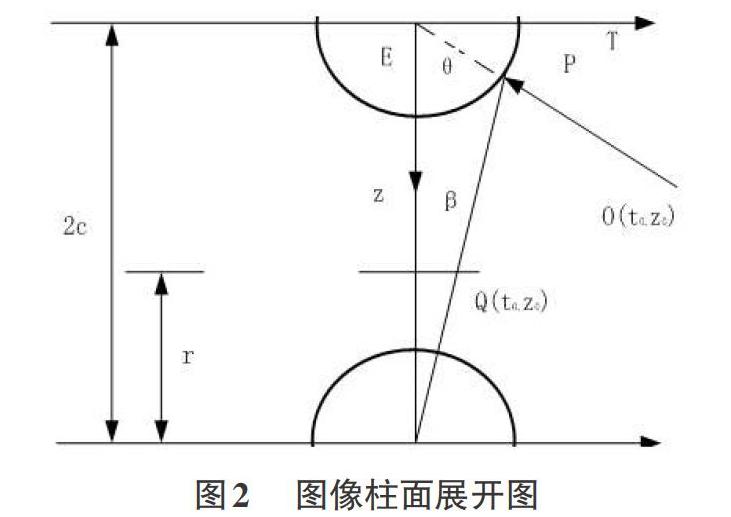
如图2所示,以虚拟相机投影中心E为原点建立坐标系,得到双曲面反射镜的面型表达式:
旋转双曲面面形公式为:
设空间一点0,它的坐標为(to,zo),由图2得到,人射光OP与竖直方向夹角是θ。从等式(2)得到人射光与曲面交点坐标.ρ,代人极坐标获得P点直角坐标(t,z,),摄录机投影坐标E(0,2c),PQ与垂直向夹角的正切为β,则
像平面中,光线落点Q的横坐标为:
将入射光线与反射光线投影到成像平面内,且人射、反射光线的方位角相等。
设物点投影点的坐标是(xo,yo);(xq,yq)为像点Q的坐标,则
因此,可以从等式(3)至(5)获得当已知对象点0的坐标(xo,yo,zo)时,可以获得像点位置Q的坐标。
(2)图像的后期处理
系统因各种外界因素影响,在获取或者传输中会产生各种不同程度的噪声。基于工作中对图像结果要求的不同,如果采用一般去噪法会出现元素图像连接处模糊的现象。因此本文采用基于元素图像的局部去噪法,既对每个元素图像进行局部区域去噪,同时为保证各个元素图像边缘不受相邻元素值的干扰,当滤波靠近相邻元素图像边界时,采用将边缘像素复制于图像之间的边界方法,以达到消除模糊的目的。经过以上处理.的图像数据,再重构三维视图时,具有良好的视觉效果。
此外,介于全景成像分辨率不均匀的特点,为实现细节化的复原原图像,文中利用插值手段达到图像分辨率均匀的目的。其中形变方面我们通过切线、径线方向线性化得到解决。通过将环形图像扩展成矩形图像来实现切线方向的线性化。具体步骤为将环形像沿着外圆周展开,沿着圆周运动360°回到起始点,缩小半径,重复上述步骤直到完成图像的线性化。既将上述步骤的每个圆周映射为矩形像的一条直线。径向的线性化通过系统校准完成。在本文中,我们使用等间距的网格:图,既根据竖线间距,使已经线性化水平线实现等间距分布。
图像经校正后,像点不是落在坐标点上,因此还需重采样处理。重采样像素灰度可根据周围像素灰度及权函数插值获得。本系统采用三次卷积法,此法虽然计算速度慢,但是与其他两种方法相比较,可以更好地保持图像的高频信息。
3.3 视频的传输
介于系统传输距离远、传输数据量大、速度快的特点,首先将Cameralink接口的LVDS信号转换为光信号,并通过光纤转换器将其传输到视频数据存储系统内,实现视频地传输。
4 实验及结论
该系统在传输距离为20km且无线通信带宽为4Mb/s的条件下通过实验验证。实验中使用声压超限信号实现了相机的触发,完成了对视频信息的准实时传输,时间延迟为53s。
目前,该系统已经通过实验测试,测试数据表明系统成像质量良好,满足使用要求,达到了预期效果。该技术在未来其他无人远程遥控实况监视背景下具有很大的应用前景。
参考文献:
[1]肖潇,杨国光.全景成像技术的现状和进展[J].光学仪器,2007,29(4):84-89.
[2]穆原子,丁力军.武器装备试验靶标建设与发展研究[J]国防科技,2013,343):40-43.
[3]宇.全景成像的计算机重构技术[D].长春理工大学,2010:50-65.[4]张三喜,姚敏,孙卫平.高速摄像及其应用技术.北京:国防工业出版社,2006:27-34.
[5]张荣文.基于Motion-JPEG2000的远程图像传输技术研究[J].舰船电子工程,2013:33-36.
[6]张志.就业图像监视的高速摄像自动触发系统研究[D].国防科技大学2009:18-20.
[7]万登峰.JPEG2000遥感图像压缩的应用研究[D].硕士学位论文,上海交通大学.2005:23-25.
[8]刘岩俊.图像存储与实时显示系统设计与实现[J].电子测量技术.2015(5):45-49.
[9]T.Svoboda.Central Panoramic Cameras Design,Geometry,Egomotion[D].phDthesis,Czech technical University.1999.
[10]曾吉勇,苏显渝.双曲面折反射全景成像系统[J].光学学报,
2003,23(9):1138-1142.
[通联编辑:梁书]
