
高时空分辨率动态星模拟器设计
2020-04-11 02:00李成浩张晓辉
光学精密工程 2020年3期
李成浩,何 煦,姬 琪,张晓辉*,李 宁
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033; 2.中国科学院大学,北京 100049)
1 引 言
空间天文望远镜以航天器为平台,然而航天器的姿态变化、运动部件的微振动等都会对空间天文望远镜的深空探测产生重要影响。空间天文望远镜处于凝视工作模式时,其曝光时长决定极限深空探测能力,长时间曝光过程中光轴指向稳定度影响成像质量[1-3]。为保证探测精度及成像质量,空间天文望远镜配备有稳像控制系统,将振动带来的影响抑制到可接受的范围。空间天文望远镜在地面装调、测试过程中,需要对稳像系统进行精度测试,稳像测试精度直接影响空间天文望远镜的成像质量[4-7]。地面稳像测试过程中,需要为空间天文望远镜提供无穷远动态目标,并且目标成像到像面的像点要存在一定的指向稳定度[8-11]。
功能检测型动态星模拟器的主要功能是模拟星图,产生的实时星图要满足检测需求,以实现对某项功能精度的精确标定。动态星模拟器一般采用显示器件作为动态星图模拟源,但是受限于显示器件的像元尺寸,动态星图模拟精度较差、分辨率较低[12-14]。另外,传统星模拟器的视场达10°×10°,大视场导致星模拟器各视场像差不同,尤其各视场畸变大小不同,也会导致动态星模拟精度较低。相关资料资报道,市面上精度较高的动态星模拟器单星张角为3″,星间角距为5″。长春理工大学利用显示器件拼接的方式实现大视场星图的模拟,由于多片显示器件对比度不一致以及显示器件像元间距对星点显示灰度和显示位置的影响,动态星模拟器的图像稳定度降低[15-17]。
现有的动态星模拟器只能对精密导星仪进行单独测试。空间光学载荷一般都布置有多个导星仪,多个导星仪需要协同工作,上述动态星模拟方法无法满足此需求[18-20]。
我国正在论证的空间天文望远镜(视场1×1.1°、口径为2.4 m、角分辨率优于0.07″)的导星仪位于望远镜像面边缘视场,本文首先对空间天文望远镜的稳像原理进行介绍,设计了相应的测试方法,为稳像系统精度测试提供特定运动规律的无穷远导星。采用反射式硅基液晶(Liquid Crystal on Silicon, LCOS)作为导星模拟源,通过在光路中加入物镜提高了运动导星的运动分辨率。针对望远镜像面结构的特殊分布,利用多路模拟光路为望远镜两侧精密导星仪以及巡天像面提供实时运动导星,并对影响运动导星模拟精度的各项误差源进行分析及建模。该星模拟器能够满足空间天文望远镜稳像精度测试所需运动导星目标高时空分辨率的要求。
2 工作原理
2.1 稳像系统组成
为了确保天文观测过程中的动态稳定成像,空间天文望远镜采用“卫星平台高精度姿控系统+振动抑制系统+精密稳像系统”的稳像方案,具体组成如图1所示。
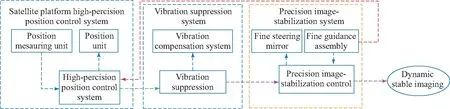
图1 空间天文望远镜稳像系统Fig.1 Image stabilization system of space telescope
卫星平台高精度姿控系统与振动抑制系统统称为粗级稳像系统,将平台/振动抑制残差控制在5.2″范围内。精密稳像系统又称精级稳像系统,在粗级稳像的基础上,进一步补偿望远镜的光轴扰动残差,使它满足预期的天文观测需求0.03″。天文望远镜整机稳像测试是在粗级稳像系统完成工作后,验证望远镜精级稳像系统的稳像精度。因此,运动导星的模拟以粗级稳像残差作为模拟标准。
2.2 精级稳像原理
空间天文望远镜的焦面布局如图2所示,天文望远镜的精密导星仪(Fine Guidance Sensor, FGS)位于望远镜两侧。精级稳像原理如图3 所示,来自无穷远的星点目标通过望远镜的光学系统,最终成像在望远镜像面上。在望远镜积分成像过程中,位于像面两侧的精密导星仪实时获取星图。通过实时提取星点坐标计算出望远镜光学系统光轴的晃动量,控制器控制压电陶瓷驱动大口径快摆镜进行光轴晃动量的补偿,从而实现精密稳像。

图2 空间望远镜焦面布局Fig.2 Focal plane layout of space telescope

图3 精密稳像原理Fig.3 Principle for precision image-stabilization
2.3 稳像测试原理
空间天文望远镜稳像测试需要同时为巡天主成像区、两侧导星仪提供成像所需的无穷远运动目标。实验室常用光束准直系统模拟无穷远目标,由于超大口径光束准直系统保证高质量成像的视场不足2′,而望远镜导星仪位于天文模块两侧,跨越1.5°的视场成像,因此难以通过单个光束准直系统为导星仪和巡天主成像区提供运动星点目标。为此,需要通过附加光路的方法拓展测试光路的视场,为导星仪提供远场运动目标。通过控制三台光束准直系统焦面处的目标进行同步运动,实现导星仪目标和巡天像面目标的同步动态运动。
现有的动态目标模拟器件有液晶光阀(Thin Film Transistor Liquid Crystal Display, TFT-LCD)、数字微透镜阵列(Digital Micro-mirror Device, DMD)以及反射式LCOS。对比3种显示器件的分辨率、像元间距和像元尺寸可知,LCOS显示器件模拟的动态目标具有更高的时间、空间分辨率[21-23]。因此使用高分辨率、大面阵反射式LCOS作为运动导星模拟源。通过相应的控制程序,在一定时间内(与模拟导星运动序列加速度相关)逐一控制液晶阵列依次工作,实现LCOS面板调制,进而模拟运动导星。LCOS面板位于光束准直系统的焦面,口径为3 m 的光束准直系统为望远镜天文焦面提供实时动态目标,布置于光束准直系统两侧的两台500 mm 口径光束准直系统可为导星仪提供实时动态目标。另外,在光路中加入物镜以提高稳像目标的模拟精度,光路组成如图4所示。
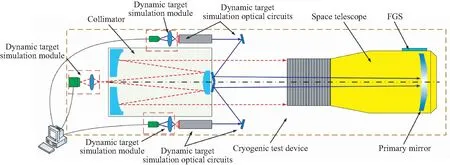
图4 运动导星模拟方案Fig.4 Scheme for guide star simulation
2.4 粗级稳像残差
根据上述望远镜稳像原理,稳像精度测试需要为巡天像面和两侧导星仪模拟运动像移目标,稳像精度测试验证望远镜的精级稳像系统,运动导星的模拟以粗级稳像角度残差作为模拟标准,通过角度功率谱密度来评价模拟运动导星的高低频分量模拟精度。已知望远镜粗级稳像系统的稳像精度为0.5″,时间分辨率为5 ms,因此,模拟像点运动轨迹与粗级稳像残差之间的差值小于0.5″作为运动导星的空间分辨率要求,时间分辨率要求优于5 ms。
粗级稳像残差为平稳随机信号,其概率分布或矩函数与统计点的起始时刻不相关。对于粗级稳像残差序列,不仅要描述序列大小,还要从频域角度分析,通过分析粗级稳像残差的角度功率谱密度(Power Spectral Density, PSD),能够清晰得出信号不同频段对应的信号功率值,更加准确地获得信号[24]。粗级稳像残差的PSD曲线如图5所示,计算得到粗级稳像残差的均方根(Root Mean Square, RMS)为5.2″。
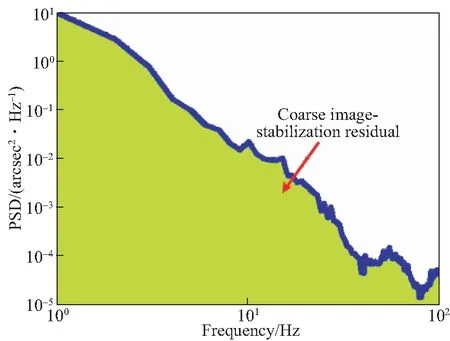
图5 粗级稳像残差的功率谱密度Fig.5 Power spectral density of coarse image-stabilization residual
3 运动导星模拟
3.1 LCOS成像原理概述
LCOS工作原理如图6所示,光源发出的光波经偏振分光棱镜(Polarizing Beam Splitter, PBS)后,P光投射、S光反射后照射到LCOS。线偏振光通过LCOS处于“开”状态下像素的反射调制,光矢量方向会有π的改变,LCOS将S波调制成P波,经PBS偏振分光棱镜透射后,通过光学系统成像。而LCOS处于“关″状态下的像素点不对光波进行调制,未经LCOS调制的线偏振光光矢量方向没有改变,经PBS反射和透射至光入射的方向,光线无法通过光学系统成像[19]。

图6 LCOS工作原理Fig.6 Working principle of LCOS
3.2 运动导星模拟方法
通过控制LCOS面板上各像素不同时刻的开启状态对运动导星进行模拟。所选LCOS面板的时间分辨率为3 ms,满足模拟运动导星时间分辨率优于5 ms的要求。LCOS面板的像元大小为3.74 μm,因此LCOS面板模拟运动导星的位移分辨率为3.74 μm,光路中加入物镜来提高LCOS面板模拟星点目标的位移分辨率,简化光路如图7所示。未加入物镜时,模拟运动导星的PSD如图8所示,由图可知模拟运动导星的高频分量有所增大,模拟误差为0.5″。
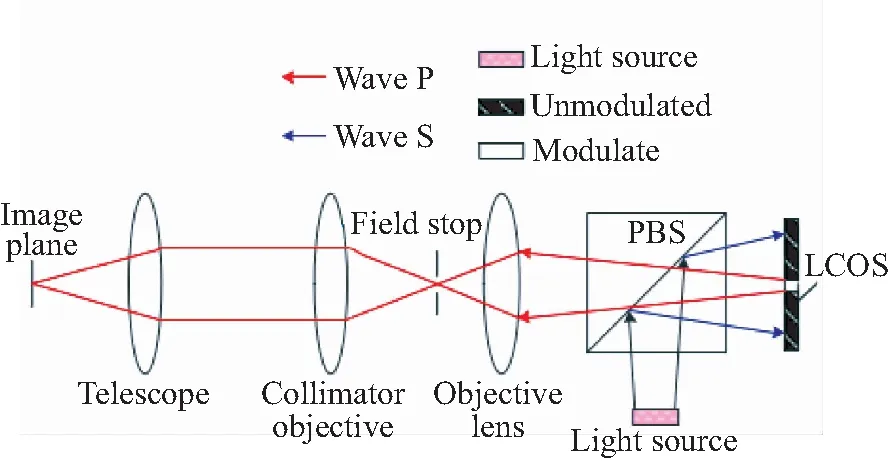
图7 运动导星模拟光路Fig.7 Simulation light path of guide star
如图7所示,加入物镜后,面阵光源发出的光波经PBS棱镜起偏后,S光反射照明LCOS面板。LCOS面板上处于“开”状态下的像素点将S光调制成P光反射至PBS棱镜,物镜将LCOS面板像素点进一步缩小,并成像在光路准直系统焦面。通过光路准直系统出射平行光为望远镜提供无穷远目标,并通过望远镜后成像在像面上。通过实时控制LCOS面板上像素点的“开”、“关”状态模拟LCOS面板上的星点运动轨迹,最终得到望远镜像面像点的运动轨迹。

图8 未加物镜模拟运动导星的功率谱密度Fig.8 Power spectral density of simulated guide star without objective lens
3.2.1 导星模拟光路物镜
LCOS面板的像素尺寸为3.74 μm,LCOS面板模拟运动导星的最高空间分辨率为3.74 μm。通过在光路中加入物镜,提高了LCOS面板模拟运动导星的运动分辨率。
已知天文望远镜焦距fT为28 m,大口径光路准直系统焦距fC为100 m,两侧光路准直系统焦距fD为7 m,LCOS像元尺寸h为3.74 μm。设巡天光路物镜缩小倍率为mX、两侧光路物镜缩小倍率为mD,巡天光路与两侧光路要具有相同的成像倍率,具体关系为:
(1)
带入上述数值可得:mX/mD=14.3。
3.2.2 运动导星模型
粗级稳像残差序列x(t)表示天文望远镜像面像点绕望远镜光轴的偏角序列,它与望远镜像面像点位移序列h(t)的关系为:
h(t)=fT×tan(x(t)).
(2)
其中fT为天文望远镜焦距。
由运动导星模拟光路可知物镜焦面像点的位移序列为:
(3)
其中:fC为光路准直系统焦距,h(t)为望远镜像面像点位移序列,fT为天文望远镜焦距。
LCOS面板上星点运动存在最小分辨率,使用LCOS面板模拟粗级稳像残差时,不能保证稳像残差序列中每一个数据都能准确模拟,通过式(4)的插值算法对粗级稳像残差进行高精度模拟:
(4)
其中:y(t)为LCOS模拟导星位移序列,hm(t)为物镜焦面像点的位移序列,k为LCOS面板结合物镜模拟星点运动的最小分辨率。
(5)
其中:plcos为LCOS的像元尺寸,m为物镜倍率。
4 运动导星模拟精度分析
影响运动导星模型精度的因素主要包括插值算法误差、LCOS面板像素尺寸误差、光路准直系统焦距误差和物镜倍率误差,对应范围如表1所示。

表1 运动导星模拟光路的主要误差源
LCOS面板模拟运动导星的插值算法误差,体现在不同倍率的物镜对运动导星模拟精度的影响上。LCOS面板像素尺寸误差使单位时间内模拟导星运动位移存在误差,最终体现为望远镜像面导星角度晃动的序列误差。光路准直系统焦距误差影响模拟的成像放大倍率,造成单位时间内星点晃动角度误差。物镜缩小倍率误差影响模拟星点位移的最小分辨率,对运动导星模拟精度产生影响。下面以两侧光路为例分析各项误差对稳像目标模拟精度的影响。
4.1 插值算法精度
首先分析了插值算法误差对运动导星模拟精度的影响,由式(4)可知插值算法误差由模拟运动导星的位移分辨率决定,运动导星的位移分辨率又由物镜缩小倍率确定。以两侧光路为例,不同缩小倍率的物镜模拟残差如图9所示。

图9 物镜倍率对模拟精度的影响Fig.9 Effect of zoom ratio of objective lens on simulation accuracy
由图9可知,随着物镜缩小倍率的提高,运动导星模拟残差逐渐减小。经计算,当物镜缩小倍率为5时,模拟运动导星偏角序列的模拟残差为0.02″,满足运动导星模拟要求。由于物镜倍率越高,其视野越暗,并且考虑到两侧光路物镜与巡天光路物镜倍率关系,两侧光路物镜倍率不易过大,因此两侧光路中物镜的缩小倍率暂定为5。5倍物镜模拟运动导星的PSD如图10所示。

图10 5倍物镜模拟运动导星的功率谱密度Fig.10 Power spectral density of simulate guide star with 5× objective lens
4.2 LCOS面板像素尺寸精度
两侧光路中物镜为5倍,由式(4)插值算法得到LCOS模拟角度序列为固定序列,在此前提下,分析LCOS面板像素尺寸误差对模拟精度的影响,结合序列RMS的计算公式,误差模型如式(6)所示:
(6)
其中:Spixel(f)为加入像元尺寸误差时模拟运动导星的功率谱密度,Smicro(f)为物镜倍率为5时模拟运动导星的功率谱密度,fmin为0.01 Hz,fmax为100 Hz。
已知LCOS面板的像素尺寸为3.74 μm,误差小于0.28 μm,仿真分析过程中LCOS面板像素尺寸的误差灵敏度曲线如图11所示。
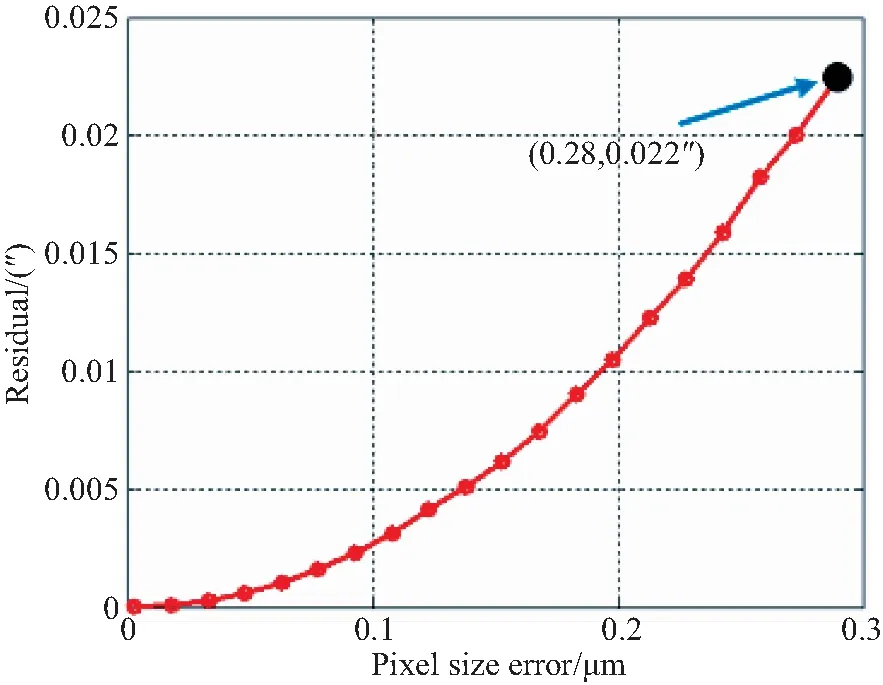
图11 LCOS面板像素尺寸误差灵敏度Fig.11 Analysis of pixel size error for LCOS panel
通过以上分析可得:运动导星模拟残差随LCOS面板像素尺寸误差的增大而增大,当LCOS面板像素误差为0.28 μm时,导星模拟残差为0.022″。
4.3 光路准直系统焦距精度
两侧光路中光路准直系统焦距误差使像面星点目标成像放大倍率发生变化,影响星点目标单位时间内的位移量,对运动导星模拟精度产生影响,误差模型如式(7)所示:
(7)
其中:Sfcol(f)为加入光路准直系统焦距误差时模拟运动导星的PSD,Smicro(f)为物镜倍率为5时模拟运动导星的PSD,fmin为0.01 Hz,fmax为100 Hz。
光路准直系统焦距误差取焦距理论值的5%范围进行分析,已知两侧光路中光路准直系统的理论焦距为7 m,分析结果如图12所示。分析可得,运动导星模拟残差随着光路准直系统焦距误差的增大而增大,当光路准直系统的焦距误差为理论值的5%时,模拟残差为0.24″;当焦距误差为焦距的2%时,模拟残差为0.1″。
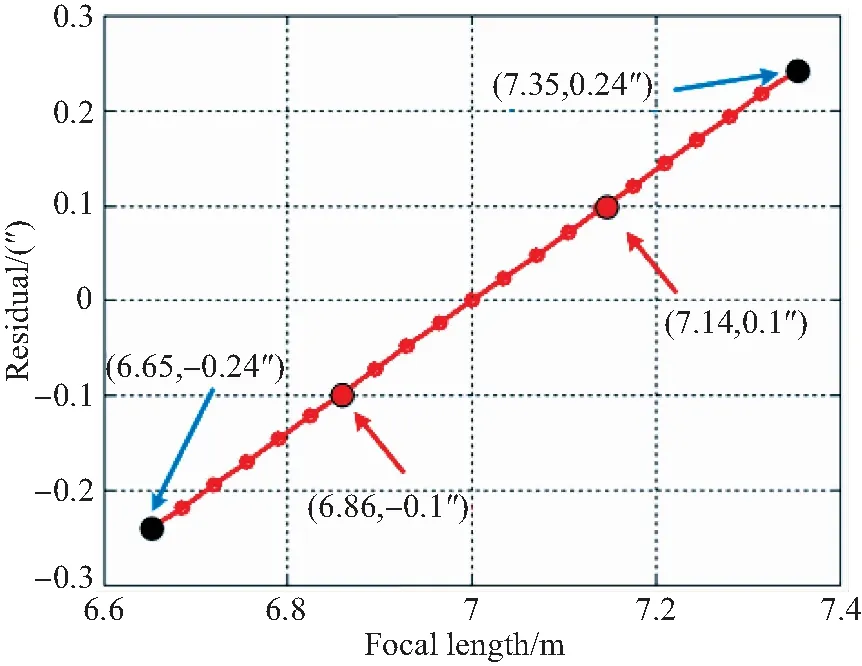
图12 光路准直系统焦距误差对模拟精度的影响Fig.12 Influence of focal length error of collimator on simulation accuracy
4.4 物镜倍率精度
两侧光路中物镜焦距误差影响与光路准直系统焦距误差带来同样影响,误差模型相同,同样使像面星点目标成像放大倍率发生变化,影响星点目标单位时间内的位移量,对运动导星模拟精度产生影响。焦距误差取焦距的5%范围进行分析,已知两侧光路的理论缩小倍率为5,分析结果如图13所示。分析可得:两侧光路模拟残差随着物镜倍率误差的增大而增大,当物镜倍率误差为理论值的5%时,模拟残差为0.24″;当物镜倍率误差为理论值的2%时,模拟残差为0.1″。

图13 物镜倍率误差对模拟精度的影响
Fig.13 Influence of zoom ratio error of objective lens on simulation accuracy
4.5 综合精度分析
综合上述所有误差,在两侧光路中物镜为5倍的前提下,对运动导星模拟精度进行分析,将上述所有误差源加入仿真模型中得到:
(8)
其中:Sall(f)为加入综合误差时模拟运动导星的PSD,Sx(f)为粗级稳像残差的PSD,fmin为0.01 Hz,fmax为100 Hz。
将上述LCOS像素误差、光路准直系统的焦距误差和物镜倍率误差按均匀分布加入运动导星模型中,其中光路准直系统焦距误差、物镜倍率误差分别取理论值的1%,2%,3%,4%和5%的范围进行分析。每种误差范围内进行100 000次蒙特卡洛仿真,运动导星模拟光路模拟残差分布如图14所示。分析可得:随着光路准直系统焦距误差、物镜倍率误差的增大,两侧光路模拟残差随之增大。当光路准直系统的焦距误差与物镜倍率误差在理论值1%内时,有95%的概率误差小于0.5″;当光路准直系统的焦距误差与物镜倍率误差在理论值5%内时,有76%的概率误差小于0.5″。

图14 综合误差下运动导星模拟误差分布Fig.14 Simulated error distribution of guide star under comprehensive error
综上所述,运动导星模拟光路中物镜放大倍率对运动导星模拟精度的影响最大。巡天光路选取25倍物镜,光路准直系统导星模拟光路中物镜的缩小倍率暂定为5倍。巡天运动导星模拟光路与两侧运动导星光路相同,两光路中物镜结合光路准直系统放大倍率相同,因此巡天光路导星精度分析与两侧光路导星精度的分析结果相同。
4.6 单星张角和星间角距
动态星模拟器的单星张角和星点角距的计算公式如下:
θ1=arctan(d/f),
(9)
θ2=arctan(2×d/f)
(10)
其中:θ为所模拟的单星张角,d为模拟星点大小,f为星模拟器焦距。
以运动星模拟器两侧光路为例,准直系统焦距为7 m,LCOS像元尺寸为3.74 μm,物镜倍率为5倍,经计算单星张角为0.02″,星间角距为0.04″。
使用物镜提高了LCOS模拟星图的运动分辨率,结合长焦距光路准直系统,进一步提高了运动导星模拟精度,包括运动导星位移分辨率、单星张角模拟精度和星间角距精度。使用单片高性能的LCOS保证了运动导星图像的稳定度。
5 实 验
为了验证上述运动导星模型,建立了运动导星模型实验装置,如图15所示,实验光路图与图7 相同,现场如图16所示。LCOS系统组件控制LCOS面板模拟导星目标运动,导星目标经物镜成像至光路准直系统焦面处。经光路准直系统出射平行光,通过成像镜头将导星目标成像至CCD上。控制电箱实时计算图像质心位置,并实时计算模拟目标的运动轨迹,之后计算运动导星相对成像镜头的光轴晃动角度序列。
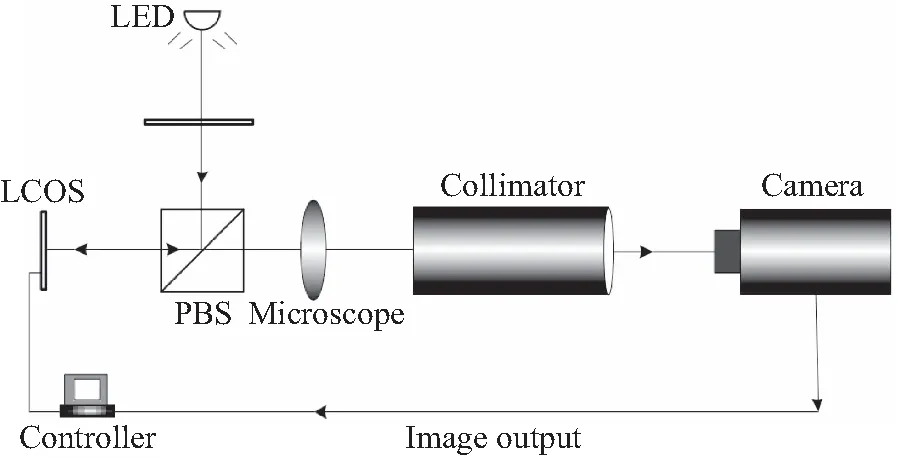
图15 运动导星模型实验系统Fig.15 Experimental system of guide star model
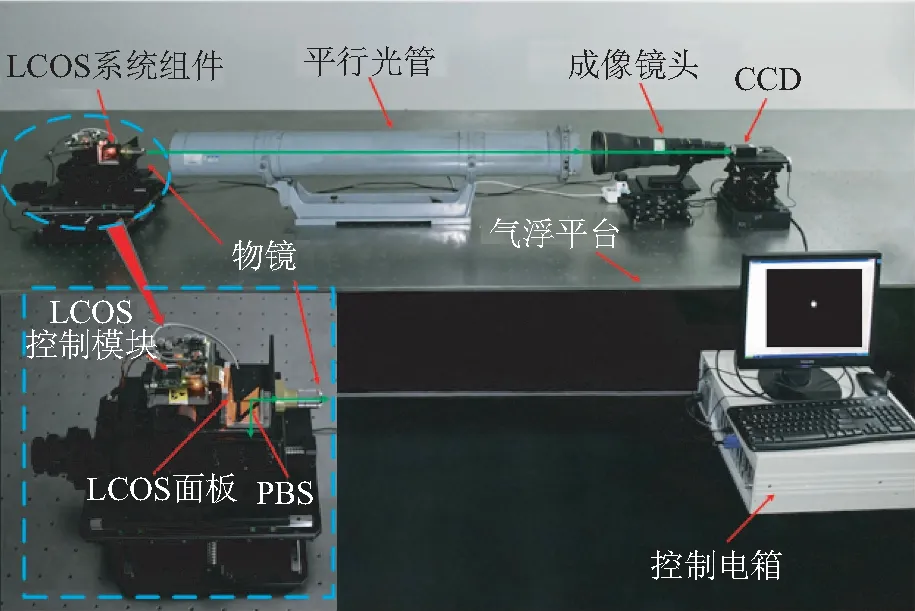
图16 运动导星模型实物图Fig.16 Photo of guide star model scenes
实验中,光路准直系统焦距为1 600 mm,成像镜头焦距为800 mm,LCOS控制面板的像元尺寸为3.74 μm,物镜缩小倍率为5。对运动导星模型进行仿真,误差模型引入如下:
(1)LCOS像元尺寸误差按均匀分布引入,误差绝对值在0.3 μm内;
(2)经过标定,光路准直系统的焦距误差和物镜倍率误差在理论值的2%以内,按均匀分布引入。
每种误差范围进行10 000次蒙特卡洛仿真,实验光路仿真模拟残差分布如图17所示。

图17 实验光路运动导星模拟误差分布Fig.17 Error distribution of guide star in experimental optical path
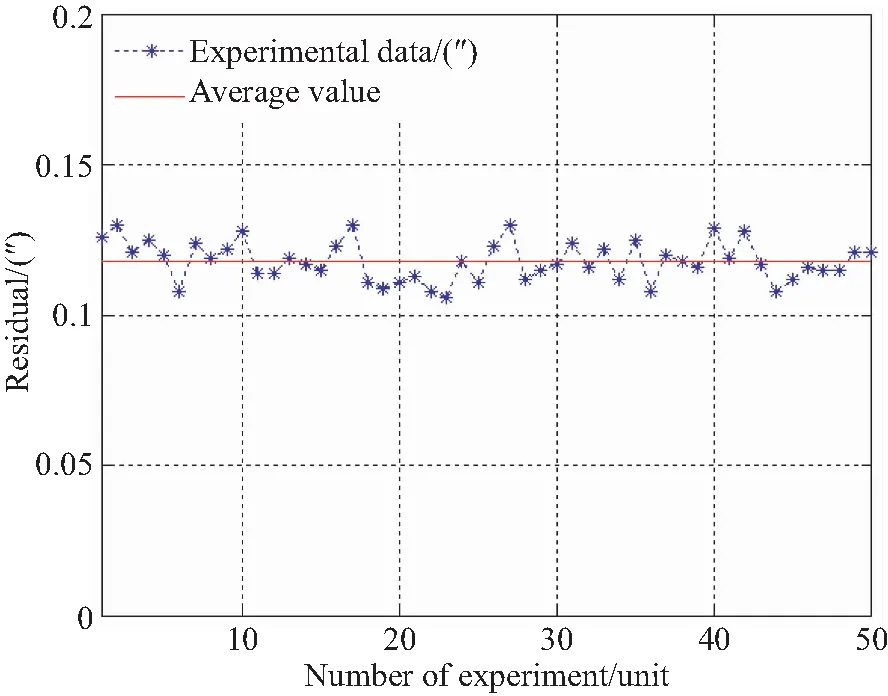
图18 动态导星模拟残差实验结果Fig.18 Result of residual test in dynamic guide star simulation
如图17所示,运动导星模拟精度优于0.5″的概率为95%,最大值为0.76″。对上述搭建的运动导星模拟光路进行50次实验,实验结果如图18 所示,模拟残差均值为0.118″,极差为0.024″。由此可知,导星模拟光路中各组成部分误差为定值,唯一变化的是实验环境引起的误差,0.024″的极差范围由实验环境引起,导星模拟残差均值0.118″包含在图17仿真误差内,实验结果与仿真结果吻合,证明运动导星模拟模型是正确的。
6 结 论
本文提出了一种用于空间天文望远镜稳像测试的运动导星模拟方法。针对空间天文望远镜的像面分布特点,提出用三路模拟光路同时为两侧导星仪和中间巡天像面提供实时动态目标。利用LCOS作为运动目标模拟源,为了提高模拟精度在光路中加入了物镜,保证了运动目标的运动分辨率。在此基础上分析了导星模拟模型中各误差对导星模拟精度的影响。分析表明,在运动导星模拟光路中加入物镜提高了导星位移分辨率。物镜倍率对导星模拟精度的影响最大,由于物镜倍率越高,其视野越暗,同时考虑到导星光路物镜与巡天光路物镜倍率的关系,导星光路物镜倍率不易过大,最终选取5倍物镜,此倍率下导星模拟残差为0.02″;LCOS像元尺寸误差对导星模拟精度的影响小于0.022″;光路准直系统的焦距误差与物镜放大倍率误差对导星模拟精度的影响呈线性趋势,当光路准直系统的焦距误差与物镜倍率误差在理论值1%内时,有95%的概率误差小于0.5″,时间分辨率为3 ms,单星张角为0.02″,星间角距为0.04″;使用物镜提高了LCOS模拟星图的运动分辨率,结合长焦距光路准直系统,进一步提高了运动导星模拟精度,包括运动导星位移分辨率、单星张角模拟精度和星间角距精度。使用单片高性能的LCOS保证了运动导星图像的稳定度。该运动导星模拟模型是可行的,满足空间天文望远镜对粗级稳像残差高时空分辨率的模拟需求。
猜你喜欢
桂林电子科技大学学报(2022年3期)2022-10-26
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
教学考试(高考生物)(2017年4期)2017-12-13
合肥学院学报(综合版)(2017年1期)2017-04-11
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
科学中国人(2015年8期)2015-07-14
