
基于动态分阶势场法的船舶自动避碰系统
2020-04-09 04:34罗贤程尹建川李宏宾
上海海事大学学报 2020年1期
罗贤程 尹建川 李宏宾

摘要:为使船舶在多船避让环境下适应航行环境的变化并自动复航,提出基于动态分阶势场法的船舶自动避碰系统。该系统基于动态势场避障规划算法,利用模糊综合评价法量化船舶碰撞危险度;依据《国际海上避碰规则》确定本船在不同会遇局面下的避让行动,并据此对斥力势函数进行调整。该系统将本船的避碰过程划分为航迹保持、避让和复航3个阶段,根据不同阶段的要求构建动态分阶势场;利用动态分阶势场法对船舶的航行环境进行建模,进而生成恰当的航向指令;利用自动舵产生舵角指令控制船舶完成避让、复航和航迹保持。仿真结果表明:该自动避碰系统可以引导船舶完成既定的避让行动,并能使船舶在安全会遇距离上驶过;该系统可以适应航行环境的变化,且具备航迹保持能力。
关键词: 动态分阶势场法; 船舶碰撞危险度; 船舶自动避碰; 航迹保持
中图分类号: U675.96 文献标志码: A
Abstract: To make a ship adapt to the change of navigation environment and go back to the channel automatically under the multi-ship avoidance environment, an automatic collision avoidance system of ships is proposed based on the dynamic hierarchical potential field method. The system is based on the dynamic potential field obstacle avoidance planning method, and the fuzzy comprehensive evaluation method is adopted to quantify ship collision risk; the avoidance actions of an own ship under different encounter situations are determined according to the International Regulations for Preventing Collisions at Sea, and the repulsive potential function is adjusted accordingly. The collision avoidance process of the own ship is divided into three stages: track keeping, avoidance, and track restoration, and the dynamic hierarchical potential field is built according to the requirements for different stages; the dynamic hierarchical potential field method is used to model the ship navigation environment so as to generate the appropriate heading command; the autopilot is used to generate the rudder angle commands to control the ship to complete the avoidance, track restoration, and track keeping. The simulation results demonstrates that: the automatic collision avoidance system can guide the ship to complete the determined avoidance action, and make the ship pass with keeping a safe distance of approach; it also has the adaptability to the changing navigation environment, and has track keeping ability.
Key words: dynamic hierarchical potential field method; ship collision risk index; automatic collision avoidance of ship; track keeping
0 引 言
船舶航行的首要任務是确保安全、避免事故的发生。据统计,在造成伤亡的海上事故中,有60%的事故是由船舶碰撞引起的[1],而超过80%的船舶碰撞事故都与人的因素有关[2],因此提高船舶避碰的自动化水平并降低避碰过程中人的因素的影响成为保障船舶航行安全的重要课题之一。
势场法最早由KHATIB[3]提出,其基本思想是:将智能体所处的环境抽象为一个虚拟势场,智能体所期望到达的目标点对智能体产生引力势场,智能体所处环境中的障碍物对智能体产生斥力势场,将引力势场与斥力势场叠加后得到全局势场,智能体沿着全局势场负梯度方向完成避障路径规划并最终到达目标点。由于势场法实时性好、安全性高、路径平滑,其被广泛应用于智能体的避障路径规划中。然而,传统势场法存在着在动态环境下规划能力不足的问题。文献[4]考虑了移动机器人相对于动态目标点和动态障碍物的速度,通过引入速度势场构建了动态势场,改进后的动态势场法更适用于动态环境。在对船舶自动避碰的研究中,相继诞生了专家系统[5]、人工神经网络[6]、进化算法[2,7]、模糊逻辑[8-9]、群集智能算法[10-11]等方法。基于上述方法的研究均取得了较理想的仿真结果,但文献[2,8]未对多船避让的情况进行延伸研究,文献[2,6-11]基于来船保向保速的假设所提出的避碰算法无法适应航行环境的动态变化,文献[2,7,10-11]未考虑算法实时性问题。
本研究为使船舶在多船避让环境下适应航行环境的变化并自动复航,提出基于动态分阶势场法的船舶自动避碰系统。研究中假设:船舶为航行在平静、开阔水域的机动船;本船与避让目标船(下文简称目标船)在互见中,目标船的静态和动态信息可以从AIS或ARPA等助航仪器中获得,且按固定的时间间隔更新,信息误差在可接受范围内。利用势场法对船舶的航行环境进行建模,采用转向避碰的方式制定避碰策略。
1 船舶碰撞危险度计算
船舶碰撞危险度(下文简称碰撞危险度)ICR是度量两船之间碰撞危险的一个量,其取值范围为[0,1]。ICR=0表示两船之间没有碰撞危险,ICR=1表示两船之间无论采取何种避碰措施都会发生碰撞[12]。作为一种基于模糊数学的评价方法,模糊综合评价法可以被应用于碰撞危险度的度量[13]。
3 动态分阶势场法
将船舶的避碰周期划分为航迹保持、避让和复航3个阶段。当本船沿某一航向航行时:若与他船没有碰撞危险,本船处于航迹保持阶段;若与他船有碰撞危险,则本船进入避让阶段。在避让阶段,本船应能够避开目标船,且能够在设定的安全会遇距离SDA上驶过。此后,应判断船舶能否复航,若船舶改变航向后,对当前正在避让的目标船能够做到驶过让清,且不会与其他来船构成新的碰撞危险,则进入复航阶段。
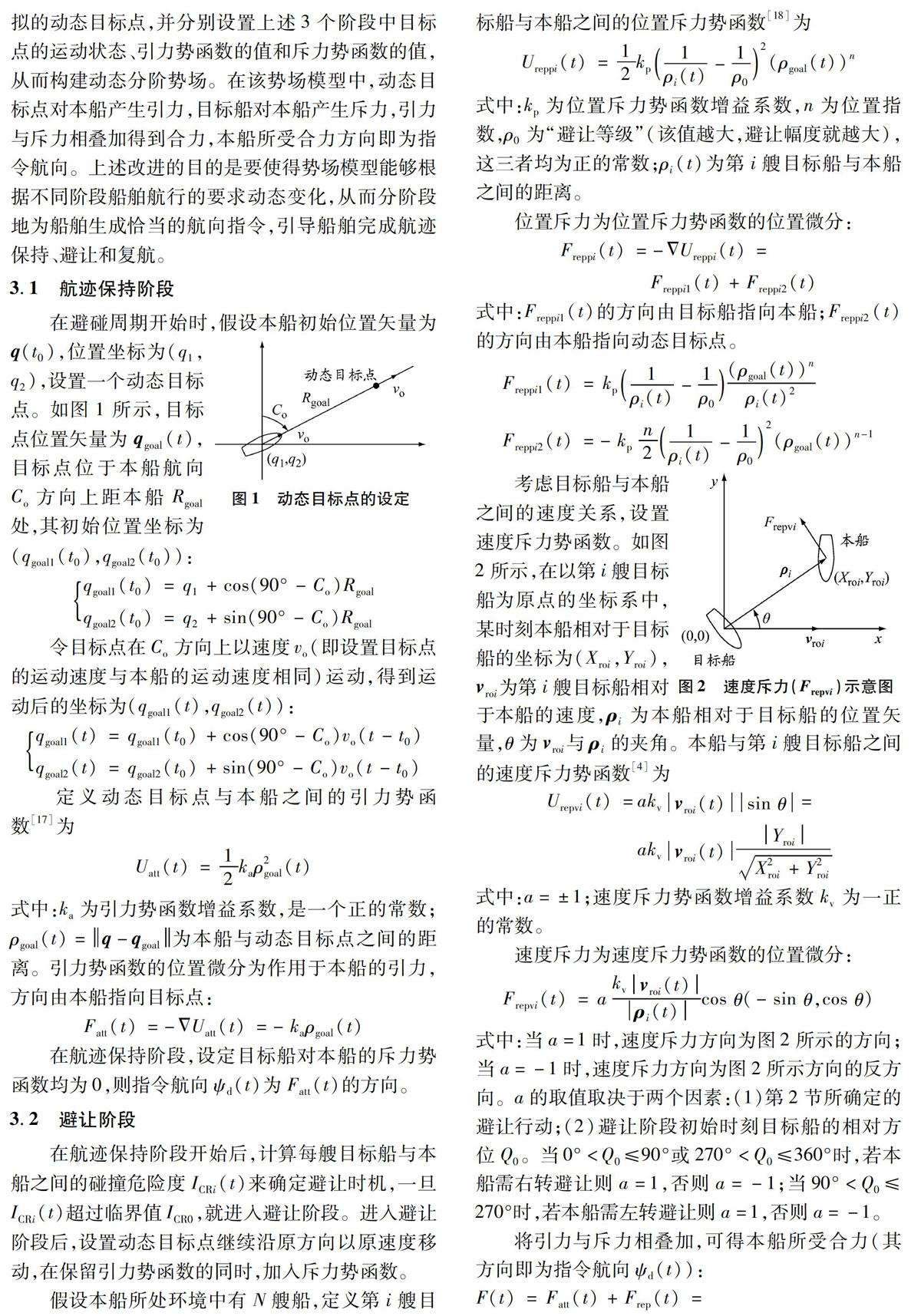
对传统的动态势场法进行改进:为船舶设置虚拟的动态目标点,并分别设置上述3个阶段中目标点的运动状态、引力势函数的值和斥力势函数的值,从而构建动态分阶势场。在该势场模型中,动态目标点对本船产生引力,目标船对本船产生斥力,引力与斥力相叠加得到合力,本船所受合力方向即为指令航向。上述改进的目的是要使得势场模型能够根据不同阶段船舶航行的要求动态变化,从而分阶段地为船舶生成恰当的航向指令,引导船舶完成航迹保持、避让和复航。
3.1 航迹保持阶段
从图6可以看出:自动避碰系统能够引导本船完成符合COLREGs要求的避让行动;避让行动完成后,本船能够回到原航迹上,并保持航迹。
5.1.3 目标船改变航向后的避碰
为检验自动避碰系统对航行环境变化的适应能力,仿真实例3取仿真实例1中的对遇场景,仅改变目标船的航向(设置目标船在t2时刻后改向为210°)。t2时刻后本船和目标船的运动轨迹见图7。
对比图7与图5c可得出结论:在目标船改变航向后,自动避碰系统也能够采取相应的避让措施。
5.2 有效性分析
5.2.1 避让有效性分析
为检验自动避碰系统能否引导船舶在安全会遇距离SDA上驶过,取仿真实例2,分别计算该实例中本船与各目标船之间的距离,结果见图8。从图8可以看出,本船与各目标船的距离均保持在设定的安全会遇距离以上,这表明自动避碰系统能够引导船舶在安全会遇距离SDA上驶过。
5.2.2 航跡保持能力分析
为分析自动避碰系统的航迹保持能力,取仿真实例1,分别计算在复航后的航迹保持阶段的不同时刻本船到原航迹的距离和本船的航向。设定当本船位于原航迹右(左)侧时,本船到原航迹的距离为一正(负)值。图9为本船到原航迹的距离随时间的变化。从图9可以看出,进入航迹保持阶段后,自动避碰系统能够使本船迅速靠近原航迹,并在其后较长一段时间内,将船位维持在原航迹右侧某一范围内。图10为本船航向随时间的变化。从图10可以看出,进入航迹保持阶段后,自动避碰系统能够将本船航向维持在原航向附近范围内。实验结果验证了本文所提出的自动避碰系统的航迹保持能力。
6 结 论
依据COLREGs的相关规定,确定了船舶在不同会遇局面下的避让行动,并将此作为调整速度斥力势函数的依据。在此基础上,将避碰过程划分为航迹保持、避让、复航3个阶段,构建了满足不同阶段船舶航行要求的动态分阶势场。通过利用动态分阶势场法生成航向指令,并利用PID自动舵控制船舶航向,构建了自动避碰系统。仿真实验结果表明:自动避碰系统能够引导船舶完成符合要求的避让行动,并能使船舶在设定的安全会遇距离上驶过;自动避碰系统可以适应航行环境的变化,并具备航迹保持能力。然而,自动避碰系统能否成功避碰取决于目标船信息的准确性,且在某些复杂会遇局面中,当本船既是直航船又是让路船时,自动避碰系统可能无法引导本船和目标船在安全会遇距离上驶过。
参考文献:
[1] NAEEM W, HENRIQUE S C, HU Liang. A reactive COLREGs-compliant navigation strategy for autonomous maritime navigation[C]//IFAC-PapersOnLine, 2016, 49(23): 207-213. DOI: 10.1016/j.ifacol.2016.10.344.
[2] TSOU Ming-Cheng, KAO Shenglong, SU Chien-Min. Decision support from genetic algorithms for ship collision avoidance route planning and alerts[J]. The Journal of Navigation, 2010, 63: 167-182. DOI: 10.1017/S037346330999021X.
[3] KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots[J]. The International Journal of Robotics Research, 1986, 5(1): 396-404.
[4] CHENG Chunlei, ZHU Daqi, SUN Bing, et al. Path planning for autonomous underwater vehicle based on artificial potential field and velocity synthesis[C]//2015 IEEE 28th Canadian Conference on Electrical and Computer Engineering (CCECE). IEEE, 2015: 717-721. DOI: 10.1109/CCECE.2015.7129363.
[5] 今津隼马, 杉崎昭生, 鹤田三郎, 等. 船舶航行专家系统的基础研究[J]. 中国航海, 1989(2): 99-102.
[6] 施平安, 陈文伟, 王敬全, 等. 基于神经网络的复合避碰专家系统研究[J]. 航海技术, 2001(6): 2-5.
[7] TSOU Ming-Cheng. Multi-target collision avoidance route planning under an ECDIS framework[J]. Ocean Engineering, 2016, 121: 268-278. DOI: 10.1016/j.oceaneng.2016.05.040.
[8] PERERA L P, CARVALHO J P, SOARES C G. Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions[J]. Journal of Marine Science and Technology, 2011, 16(1): 84-99. DOI: 10.1007/s00773-010-0106-x.
[9] PERERA L P, CARVALHO J P, SOARES C G. Intelligent ocean navigation and fuzzy-Bayesian decision/action formulation[J]. IEEE Journal of Oceanic Engineering, 2012, 37(2): 204-219. DOI: 10.1109/JOE.2012.2184949.
[10] LAZAROWSKA A. Safe ship control method with the use of ant colony optimization[J]. Solid State Phenomena, 2014, 210: 234-244. DOI: 10.4028/www.scientific.net/SSP.210.234.
[11] LAZAROWSKA A. Ships trajectory planning for collision avoidance at sea based on ant colony optimisation[J]. The Journal of Navigation, 2015, 68(2): 291-307. DOI: 10.1017/S0373463314000708.
[12] 毕修颖. 船舶碰撞危险度及避碰决策模型的研究[D]. 大连: 大连海事大学, 2000.
[13] LI Yishan, GUO Zhiqiang, YANG Jie, et al. Prediction of ship collision risk based on CART[J]. IET Intelligent Transport Systems, 2018, 12(10): 1345-1350. DOI: 10.1049/iet-its.2018.5281.
[14] 周江華, 吴春杰. 船舶碰撞危险度模型的构建[J]. 宁波大学学报(理工版), 2004, 17(1): 61-65.
[15] 东昉, 徐建红, 苏开文. 船舶会遇态势的判断[J]. 航海技术, 2007(1): 2-5.
[16] 郑中义. 船舶自动避碰决策系统的研究[D]. 大连: 大连海事大学, 2000.
[17] MONTIEL O, OROZCO-ROSAS U, SEP U'LVEDA R. Path planning for mobile robots using Bacterial Potential Field for avoiding static and dynamic obstacles[J]. Expert Systems with Applications, 2015, 42(12): 5177-5191. DOI: 10.1016/j.eswa.2015.02.033.
[18] DAS B, SUBUDHI B, PATI B B. Co-operative control of a team of autonomous underwater vehicles in an obstacle-rich environment[J]. Journal of Marine Engineering & Technology, 2016, 15(3): 135-151. DOI: 10.1080/20464177.2016.1247636.
[19] FOSSEN T I. Guidance and control of ocean vehicles[M]. New York: Wiley, 1994.
(编辑 赵勉)
