
Design and simulation of precise parking control for shallow rail transit based on granular function
2020-04-09 06:21:14CHENJingYINYeSHIChaohuiZHOUWei
上海师范大学学报·自然科学版 2020年1期
CHEN Jing,YIN Ye,SHI Chaohui,ZHOU Wei
(College of Information,Mechanical and Electrical Engineering,Shanghai Normal University,Shanghai 201418,China)
Abstract:A new type of shallow rail transit was designed,which was suitable for the shallow underground of densely populated and congested areas.The surface was covered with transparent glass with the small rail train running in the shallow trenches.A corresponding train model was established based on the system,and a fuzzy control algorithm with granular function was proposed.Simultaneously,a proportional-integral-derivative(PID)controller and a fuzzy granular function controller were designed to control the speed of precise parking.The simulation experimental results showed that the tracking performance of the design was better than that of the PID controller,and the parking accuracy was also improved.
Key words:shallow rail transit;precise parking;fuzzy control;granular function
At present,most people travel by bus,subway,private car,tram,bicycle and other means of transportation.In densely populated central urban areas,tourist attractions and other areas,subway system cannot cover all areas because of tight road traffic resources and traffic congestion.Under the premise of not changing the original transportation system,rail transit in the shallow underground is taken into account to improve travel efficiency,to reduce the risk of traffic congestion,and to decrease the difficulty of small-range short-distance travel.The shallow rail transit system is located in the shallow underground.The surface of the system is covered with transparent glass with train running in the shallow trench.At the same time,a series of problems such as construction difficulty,construction time,underground pipeline,energy saving,emission reduction and operation structure are considered by this design.
Due to the characteristics of nonlinearity,multi-objectiveness and complexityof the train operation,it is difficult to establish accurate mathematical models and optimal solutions.Besides,it is not easy to achieve satisfactory controlling results with conventional algorithms.The efficiency of transportation will be affected by the accuracy of the parking location.
The shallow track train control system is based on the principle of granular function control.Granular function control adopts the combination of fuzzy control and granular function.Fuzzy control can reflect the control idea commendably,meeting the high-quality operation of the train.Although it is easy to realize the granular function control,combined with the advantages of fuzzy control,the complex control problem can also be solved.The fuzzy particle function algorithm not only solves the problem of fuzzy control rule explosion,but also eliminates fuzzification and defuzzification,which simplifies the control process[1-2].
1 Design of shallow rail transit system
The shallow rail transit system needs to dig a deep trench of about 5.0 m deep and about 4.1 m wide on the motor vehicle road or sidewalk of the highway.The width is just the width of a motor vehicle lane,where the train virtual trajectory is placed.The small track train runs on the virtual track.The implementation scheme of the train virtual track adopts the tracking scheme of Zhuzhou Intelligent Track Train,and only two virtual tracks are drawn on the ground[3].The tunnel is covered with transparent tempered glass with a thickness of 0.2 m.The train travels safely at a speed lower than normal rail transit,and the maximum travel speed cannot exceed 60 km·h-1.The shallow trenches of the shallow track are constructed from prefabricated parts,saving project costs greatly.Prefabricated parts with a thickness of 0.3 m and a height of 4.8 m are used on the left and right sides,and 0.4 m prefabricated parts are used between road surface and pipeline.The structure of this shallow track is shown in figure 1.
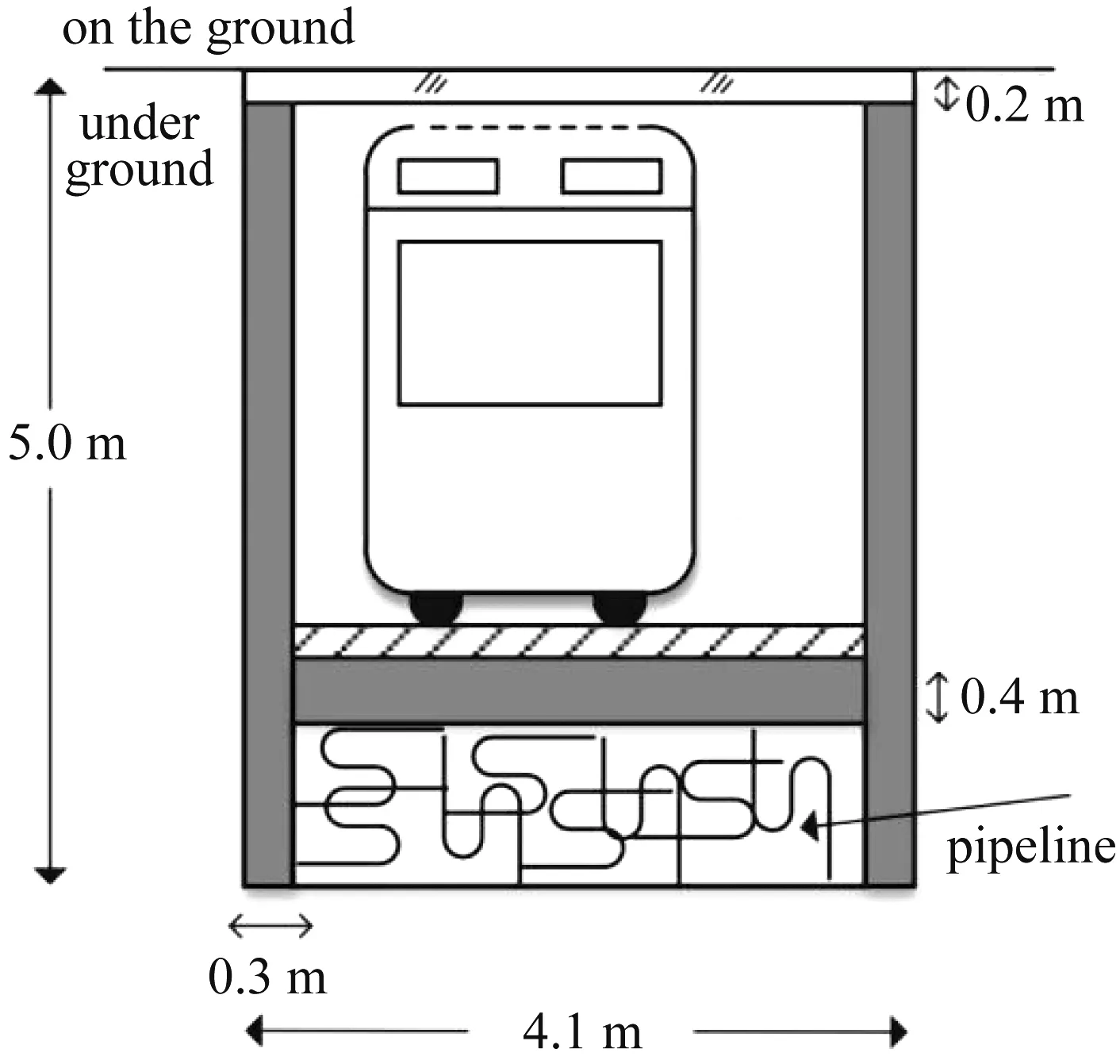
Figure 1 Structure diagram of shallow rail transit system
In figure 1,the train is a specific model of shallow track.The car body is a narrow body train with a height of 3 m and a width of 2 m and transparent roof,which can reasonably utilize daylight illumination.Pedestrians can stand in the train compartments because there are only a small number of seats in the carriages for the elderly and the weak,and the rest are space-saving.
The new shallow rail transit can connect subway stations with residential areas,subway stations and office buildings.It can also be set up in the bustling commercial and tourist areas,and even make a circle for pedestrians in the inner ring of big cities.Pedestrians can transfer to the new subway or other road vehicles lines connecting to the new shallow rail transit to get to the finish,or take the new shallow rail transit to visit the lively business districts and attractions.Since the shallow rail transit are operated underground,the travel efficiency can be greatly improved without affecting the original traffic on the ground[4].
2 Train model establishment
When the train is decelerating,it is necessary to ensure the punctuality of the train and the accuracy of parking as well as the comfort of passengers.Thus to analyze the movement state of the train is needed.Through the kinetic theory,the whole train is regarded as a mass point,regardless of size and dimension.From the mass point of view,the force is analyzed to establish a dynamic single-mass model of a suitable shallow-track train[5].
The force of the train is shown in figure 2,including the support of the road to the train FN,the gravity of the train G,the force of traction FA,the braking force FB,the basic resistance of the train w0,and the additional resistance of the train W',the slope angle α.The latter four forces affect the running state of the train.On the other word,their combined force determines the running state of the train[6].

Figure 2 Single-point model of shallow rail transit train
According to the established model,in order to simulate the running process of the train,firstly,the resultant force acting on the train would be calculated.Secondly,the running speed and running distance of the train would be calculated according to the motion equation.
The combined force of the train when it is running is as follows:

According to the line conditions and operational requirements,the train has three working conditions:traction,idleness and braking.Under these three different conditions,the force of the tram is different.If the train is operating in a towing condition,C=FA-w0-W';if the train is operating in a braking condition,C=-FB-w0-W';if the train is operating in an inert condition,C=-w0-W'[7-8].
According to Newton’s second law of motion:

where m is the mass of the train,a is the gravitational acceleration of the train,

where t is the time of the train,v is the speed of the train.
Substituting equation(2)and(3)into equation(1),we obtain:

The basic resistance calculation formula and the additional resistance calculation formula are substituted into equation(4),and the train motion equation is compiled as:

where A0,A1,A2are the empirical constants obtained from the test,wi,wr,wsare the ramp,curve,and tunnel additional resistance.
3 Research and implementation of precise parking control algorithm
The non-safe braking curve has a constant deceleration property.According to this feature,the train operation control can be simplified,which plays an important role in the research on the parking accuracy.The constant deceleration makes the train almost no bumps during driving,which improves the passengers’comfort.The non-safe braking curve is described as follows:

where Δs is the step size;v1is the initial speed of the train,v1=v(0)=0;abis the constant deceleration of the braking curve;g is the acceleration of gravity;Mpis the static mass of the train;MIis the inertial mass of the train;Δh is the height difference between the current position of the train and the stop position of the train target.
Assuming the train running curve is very close to the ideal curve,it means that the more accurately the train tracks the target curve,the more accurate the train parking position is.On the contrary,the worse the train tracks the target curve,the less accurate the final train parking accuracy[9-10]achieves.
4 Simulation results analysis
Simulink tool is used to simulate the train parking accuracy,and the speed-time curve is used as the input curve to be tracked.Simulink not only enables dynamic modeling and simulation analysis,but also simplifies the simulation process to achieve simulation accuracy and efficiency.
The precise stop inside the station does not consider the process of deceleration outside the station.Since the speed of a specific narrow-body train on a shallow track is up to 60 km·h-1,the initial speed when entering the station is set to not exceed 35 km·h-1,and the constant deceleration is 0.5 m·s-2.In the research,the starting velocity is selected as 5.56 m·s-1.
If the current controller can almost completely follow the train running speed,a perfect V-T curve can be calculated,which is based on a non-safe braking curve.
According to the narrow-body train model and proportional-integral-derivative(PID)control algorithm,the PID controller tracking target speed curve is obtained,as shown in figure 3.

Figure 3 (a)PID controller V-T target curve;(b)PID controller V-S target curve
The experimental results shows that the PID controller cannot be satisfactorily content with the tracking effect of the ideal curve for the operation of the shallow track narrow-body train.The parking accuracy is 34 cm,which does not meet the parking accuracy requirement of±30 cm.At the beginning,the speed fluctuated greatly,which reduced the riding performance and did not meet the needs of passengers[11-12].
The fuzzy grain function rule refers to the sample points of the controller particle response function given by human experience and knowledge.The particle response functions are obtained by interpolation and fittingthe sample points[13].The fuzzy controller module built by simulink is replaced with the function module,and then the granular function fitted by the cftool tool is loaded into the function,using the 3rd-order fitting to obtain the granular function formula[14-18].
The fitted particle function is loaded into the function of the established fuzzy particle function(FPF)system simulation.In the case of the same input conditions as the PID controller,the 3rd-order granular function simulation train parking accuracy tracking V-T curve and V-S curve are shown in figure 4.

Figure 4 (a)the 3rd-order FPF controller V-T target curve;(b)the 3rd-order FPF controller V-S target curve
When the train adopts the 3rd-order fuzzy particle function control,the whole running process maintains a preferable tracking effect.The performance of the tracking target parking curve is satisfactory,and the parking accuracy is 22.5 cm,which meets the official parking accuracy requirements of±30 cm.
5 Conclusion
By applying the principle of granular function control into the automatic train operation system,the theory of granular function control are enriched,and a new way to achieve high quality control of train operation process is provided.The simulation results show that the granular function controller can achieve punctuality,comfort and safety of the train,which provides a new idea for the operation of the shallow rail transit automatic running system.
