深水海底节点二次定位方法
2020-04-09 10:03王忠成周华伟童思友方云峰曹国滨
石油地球物理勘探 2020年2期
王忠成 周华伟② 童思友*③ 方云峰 曹国滨
(①中国海洋大学海底科学与技术教育部重点实验室,山东青岛 266100; ②休斯顿大学地球与大气科学系,得克萨斯休斯顿 77204;③青岛海洋科学与技术试点国家实验室海洋矿产资源评价与探测技术功能实验室,山东青岛 266061;④东方地球物理公司物探技术研究中心,河北涿州 072751; ⑤中国石化石油工程地球物理公司,山东东营 257100)
0 引言
海底节点(Ocean Bottom Node,OBN)采集具有较高的灵活性,布放、回收方便,能够获得全方位保真地震数据,提高地震成像质量和四维勘探的可重复性,改善油藏地震监测效果,在海洋地震勘探中具有极大的优越性,逐渐成为海洋地震勘探中的常用观测手段[1]。在OBN地震数据采集时,通过机械放缆或水下机器人铺设检波器,由于受到海流、潮汐等因素的影响,检波器可能会随着时间而逐渐偏离设计位置。这种偏差有时非常严重,对采集资料影响很大。如果按照设计的投放位置处理和解释地震数据,会带来较大的误差,这就需要再次定位OBN的位置,也称二次定位。
目前常用的二次定位方法有初至波和声波定位方法,其中声波二次定位具有较高精度[2-4],但是需要额外的硬件设备,费用昂贵,还受采收率因素的限制。初至波二次定位是一种经济实惠且能满足精度要求的方法,分为近正四面体法[5]、最小二乘定位法、搜索法[6]、多次拟合曲面法[7]等,这些方法已成功用于海底电缆(Ocean Bottom Cable,OBC)地震勘探的二次定位,取得了一定效果[8]。但OBC二次定位通常仅针对水平方向的x、y坐标,在海底不平坦或海水速度纵向变化的深水OBN勘探中,深度方向z坐标的准确性也相当重要,因此需要对检波器三维坐标二次定位。
现有的二次定位方法选取速度时或给定为常数,或根据炮、检点坐标拟合出一个随炮检距变化的速度曲线。如果仅需求取水平方向的x、y坐标,且炮点相对于检波点方位分布均匀,则能够准确地确定检波点位置。如果需要对三维坐标二次定位,则以上两种速度选取方式误差较大,尤其在z坐标的求取上。这是因为选取常速度具有一定的随机性,当选取的速度值与实际海水平均速度存在差异时会引入误差。根据炮检距拟合速度场的方式,受共检波点数据观测角的局限(炮点在x、y方向均有一定延伸,在z方向仅在某一个点存在观测值),反演的三维检波点坐标并不收敛,或反演误差较大。本文讨论不同速度选取方式的二次定位精度,并提出新的速度求解方式,在模型试算中取得了较高的精度。最后将本文方法应用于深水区实际OBN资料二次定位,得到了较好的效果。
1 模型试验
为了验证海水速度对于二次定位精度的影响,本文设计了一个深水模型,利用不同方法计算检波点到各炮点的走时,考察不同方法的精度。
在一个OBN共检波点道集内,在二次定位的直达波炮检距分布范围内(通常小于10km),可以认为海水速度在横向是均匀的,而只考虑海水速度在垂向的变化情况。关于海水速度随深度的变化,常用Munk模型[9]描述
v(z)=vmin{1+ε[e-η-(1-η)]}
(1)
式中:η=2(z-zmin)/B,z为深度,zmin为声速极小值对应的深度,B为导波宽度;ε=0.57×10-2为与海域有关的无量纲常数;vmin为声速极小值。取B=1000m、zmin=1000m、vmin=1480m/s建立声速曲线(图1)。
以声速曲线(图1)为基础,建立海水速度模型(图2),其中声速在水平方向没有变化,仅在垂直方向变化(图1)。用旅行时线性插值(LTI)[10]射线追踪获取检波点到每一个炮点的走时(图3),可见走时场关于检波点呈对称分布,与理论认识较一致。

图1 根据式(1)建立的深海声速曲线

图2 海水速度模型及炮点和检波点相对关系
模型尺度为6000m×6000m×1500m,将检波点置于(2000m,1000m,1500m)处,在海面上(深度为0)炮线沿着x方向,以50m的间隔放炮,炮线距为100m

图3 由LTI射线追踪所得炮点走时
1.1 常速度反演
已知炮点坐标以及检波点到各炮点的直达波走时,便可对检波点二次定位。在二次定位计算时,通常假设海水速度恒定不变(约1500m/s)。为观察海水速度恒定不变对定位精度的影响,以1m/s的间隔在1480~1500m/s范围扫描,分别得到二次定位结果(表1)。可见: 当速度为 1487m/s时,所得结果与真实检波点坐标最接近;速度为其他值时,所得检波点x、y、z坐标都存在一定误差(误差为几米到几十米),对于研究地壳结构的海底地震仪(OBS,Ocean Bottom Seismograph)勘探可以接受这种误差,对于服务于油气勘探的OBN地震采集则是非常大的误差。
1.2 根据炮检距拟合速度场反演
将海水速度看作随炮检距变化的变量是二次定位计算中的另一种速度选取方式,一般仅在反演检波点x、y坐标时使用该方法[7]。具体的做法是,根据一次定位的炮、检点坐标计算炮检距,然后根据拾取的初至时间拟合出一条速度曲线,通常采用多项式拟合的方式。以3次多项式拟合为例

表1 不同速度的检波点坐标反演误差
注:将检波点坐标作为未知量,利用最小二乘法反演,给定检波点的初始坐标为(2100m,1100m,1400m)
v(h)=a1+a2h+a3h2+a4h3
(2)
式中:h为炮检距;v(h)为拟合的速度值;a1、a2、a3、a4为系数项。
用曲线拟合的方式拟合速度场,并求解试算模型(图2)中的检波点坐标。检波点的初始坐标设置为(2100m,1100m,1400m),求得检波点坐标为(1997.79m,1000.72m,1411.09m),与检波点真实坐标(2000m,1000m,1500m)相比,在x、y、z坐标分别存在-2.21m、0.72m和-88.91m的绝对误差。可见所得x、y坐标较准确,但深度坐标z的绝对误差较大。以上模型试验结果表明,通过炮检距拟合速度场的方式不能在三维空间准确地二次定位检波点,而用常速度计算的方式会因选取不同的常速度值产生不同的定位误差。
2 方法
海水速度的变化对地震波的射线路径、走时和振幅产生较大影响[11],因此在进行OBN二次定位时必须考虑海水速度的影响。通过表1可以看出,当速度选择合适时可以用常速度代替变速度的情况。前人在研究OBS二次定位问题时,也曾考虑寻找一个合适的等效速度提高定位精度,但采用的是扫描法[12],计算量剧增,且只能从一些离散点中得到等效速度。为寻找合适的等效速度,同时保证计算效率,本文在反演检波点坐标时将速度视为未知量同时反演。
根据炮点坐标,海水速度和直达波走时有如下关系
(3)
式中: (xi,yi,zi)为第i炮点坐标;ti为第i炮点直达波走时; (x,y,z)为检波点坐标;v为海水等效速度。这样问题变为求函数fi(x,y,z,v)=(x-xi)2+(y-yi)2+(z-zi)2-(vti)2的零点问题,下面用牛顿迭代法求解[13]。
对每个fi(x,y,z,v)都在初始近似值(x0,y0,z0,v0)附近采用4元Taylor展开,并取其线性部分,得
(4)
系数矩阵记为雅克比矩阵J0,其中的元素分别为
(5)
式(4)为超定线性方程组,用最小二乘法很容易求解。式(4)的解可记为
(6)
从而求得
(7)
得到x1、y1、z1、v1,重复以上做法便可得x2、y2、z2、v2等。
算法步骤可总结为:
(1)选取初始近似值x0、y0、z0、v0,计算f1(x0,y0,z0,v0)、f2(x0,y0,z0,v0)、…、fn(x0,y0,z0,v0);
(2)计算J0中的元素,解式(4)求出Δx0、Δy0、Δz0、Δv0;
(3)计算x1、y1、z1、v1;
(4)计算f1(x1,y1,z1,v1)、f2(x1,y1,z1,v1)、…、fn(x1,y1,z1,v1);
(5)若f1(x1,y1,z1,v1)≈0、f2(x1,y1,z1,v1)≈0、…、fn(x1,y1,z1,v1)≈0,或Δx0、Δy0、Δz0、Δv0在容许的误差范围内,则停止计算; 否则以x1、y1、z1、v1代替x0、y0、z0、v0重复以上步骤。
给定检波点初始坐标为(2100m,1100m,1400m),速度初始值为1500m/s,用这种方法反演的模型检波点坐标为(1999.86m,999.70m,1501.54m),速度为1487.57m/s,即反演结果十分接近真实值,同时发现反演坐标与真实坐标(2000m,1000m,1500m)相比,在x、y、z坐标分别存在-0.14m、-0.30m和1.54m的绝对误差。误差来源主要为: 一是在射线追踪计算时,炮点到检波点直达波走时存在一定误差; 二是由一个等效速度代替垂向变化的速度模型带来的误差,即由直线代替弯曲射线带来的误差。但总体来说误差较小,能够满足精度要求。
3 应用实例
为了验证方法的应用效果,选用B海域OBN测线数据进行二次定位计算。其中一个OBN在x、y、z坐标的偏移量分别为35.50m、-36.53m、13.66m,反演所得等效速度为1482.46m/s。选取A炮线的数据分别进行二次定位前、后线性动校正(图4)和双曲动校正(图5)。可见:在二次定位后OBN坐标准确的情况下,线性动校正后直达波形态呈对称分布[14],位置更准确(图4右);经二次定位,双曲动校正后直达波的形态趋向于直线[15-16],说明检波点位置准确(图5右)。
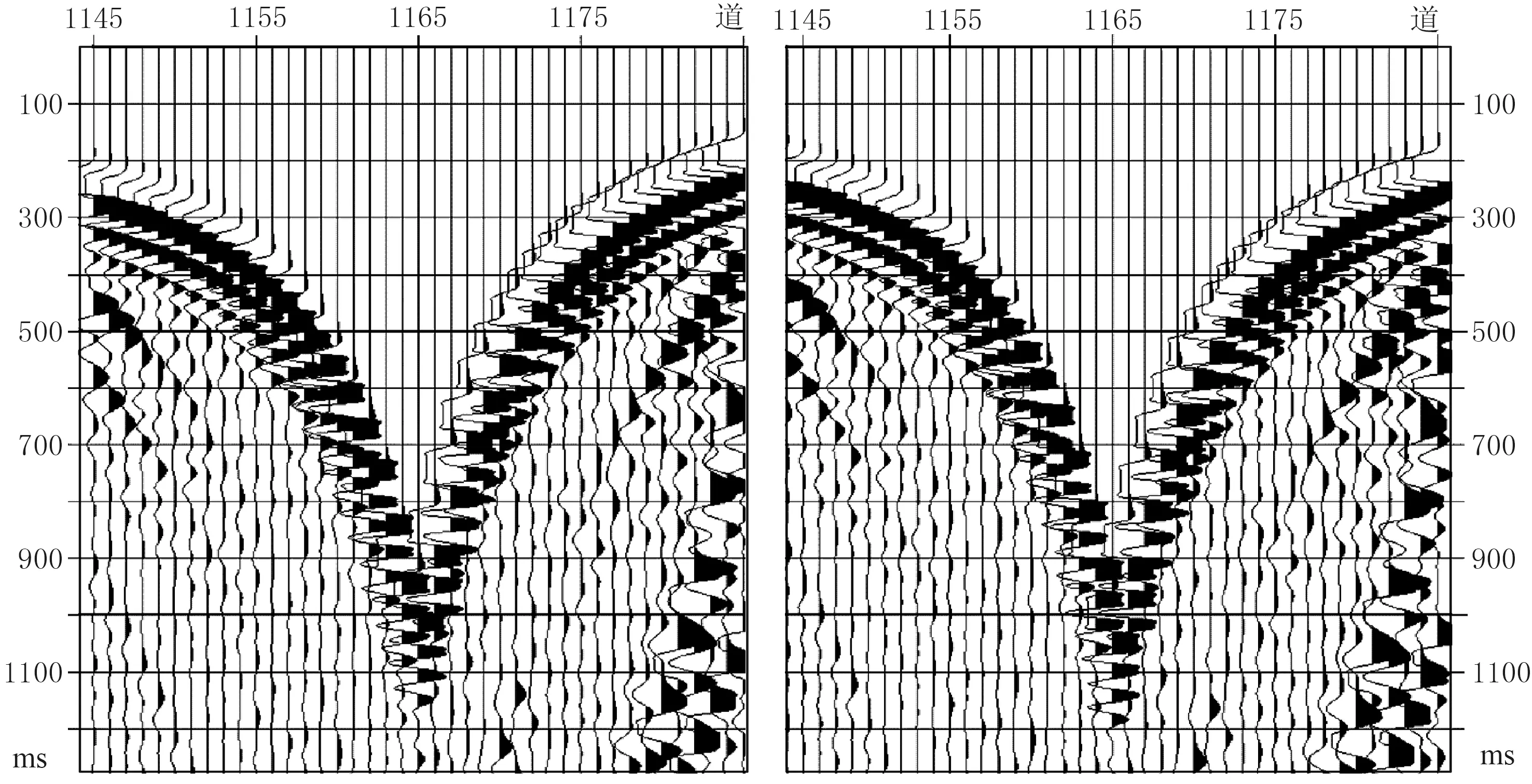
图4 OBN炮线A二次定位前(左)、后(右)线性动校正效果

图5 OBN炮线A二次定位前(左)、后(右)双曲动校正效果
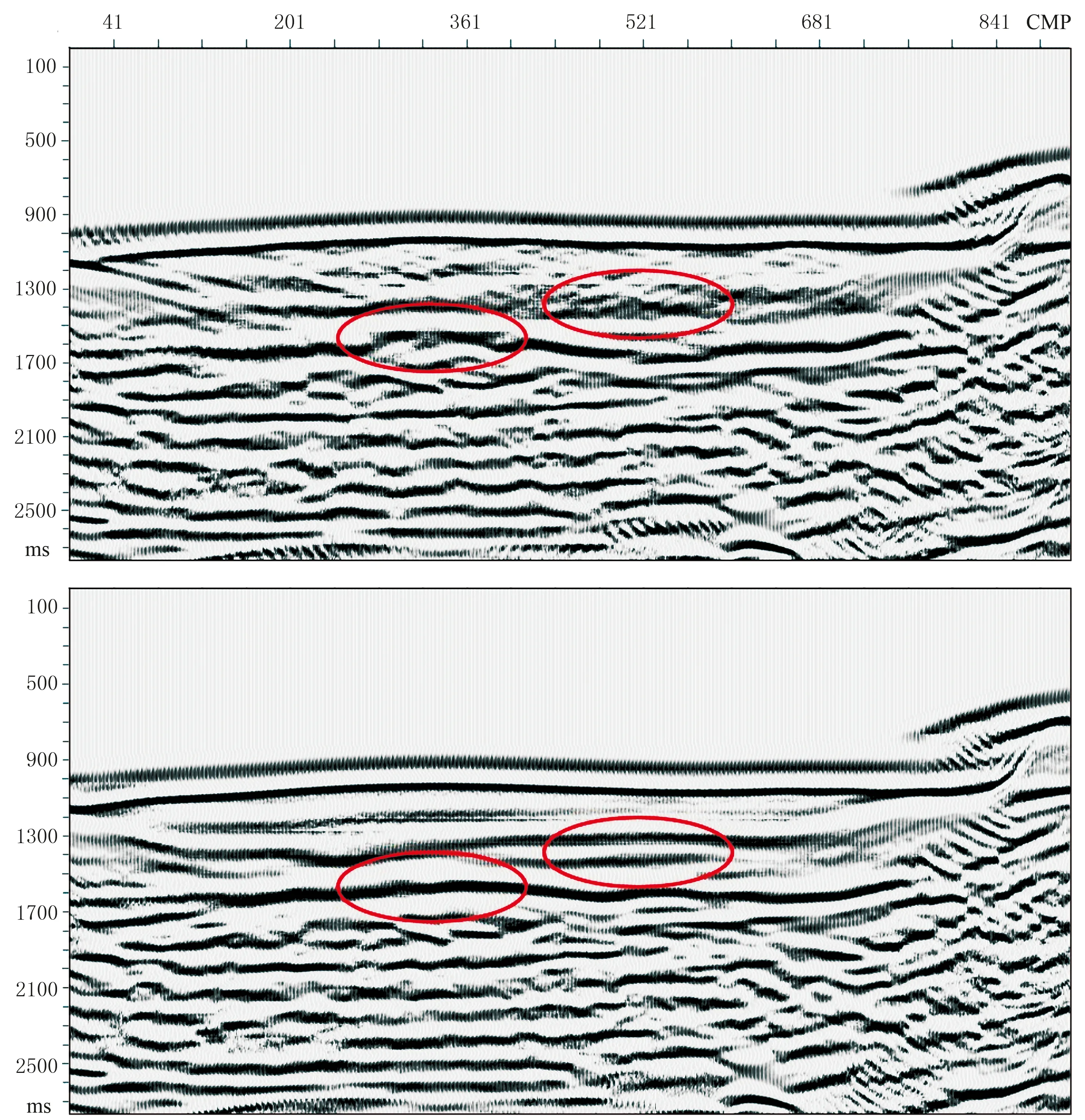
图6 CMP线L二次定位前(上)、后(下)偏移剖面
为了检验二次定位对成像效果的影响,对二次定位前、后OBN数据进行叠前时间偏移。图6为CMP线L二次定位前、 后偏移剖面。由图可见,经过二次定位的偏移剖面同相轴连续性更好,分辨率、信噪比更高,有效改善了OBN资料的成像质量(图6下)。
4 结论
海水速度是影响地震射线路径和走时的重要因素,而OBN二次定位的原理就是使检波点到各炮点直达波的理论走时与实际拾取走时的误差平方和最小,因此必须考虑海水速度对定位精度的影响。模型试算表明,当海水速度仅存在垂向变化时,可以用一个合适的等效速度进行二次定位计算。通过反演检波点坐标时加入海水速度这一个未知量,进一步提高了二次定位精度。相对于使用常速度和拟合速度场这两种常用的速度给定方式,本文方法能取得更高的定位精度。最后,将本文方法用于实际OBN数据二次定位,取得了较好的动校正和成像效果。
猜你喜欢
小天使·初中版(2021年9期)2021-09-18
当代陕西(2019年17期)2019-10-08
石油地球物理勘探(2019年2期)2019-04-12
大科技·C版(2018年4期)2018-10-21
铁道通信信号(2018年2期)2018-04-18
科学与财富(2018年1期)2018-03-03
兵团工运(2018年8期)2018-01-22
中国新技术新产品(2013年9期)2013-05-12
意林(2007年20期)2007-05-14