
矩阵风扇冷却系统模糊控制的研究*
2020-04-03 03:56王宏朝单希壮杨志刚
汽车工程 2020年3期
王宏朝,单希壮,杨志刚,3
(1.郑州宇通客车股份有限公司,郑州 450006; 2.同济大学,上海地面交通工具风洞中心,上海 201804;3.北京民用飞机技术研究中心,北京 102211)
前言
车辆运行过程中,前端冷却模块的换热性能和能耗会受到发动机负荷、发动机舱内部流场、环境温度、车速、风扇转速和空调运行状态等因素的综合影响[1-2]。对于以风扇转速为主要控制对象之一的冷却系统而言,其综合性能的好坏很大程度上依赖于所采用的控制策略。
近年来,在车辆领域逐渐引入了矩阵风扇的概念,即采用一组小尺寸的风扇组合来代替原有的单风扇系统。AVID公司提出的e-Fans冷却系统采用了矩阵风扇型式,通过对搭载该系统的车辆进行测试表明,发动机的寄生负荷明显减小,整车油耗能降低15%[3]。福田欧辉提出的e-AIR发动机智能冷却系统同样采用了一组电驱动的风扇组合,不仅使整车能耗减少了3%~5%,客车的内外噪声也降低了2~3 dB[4]。Wang等人通过研究不同矩阵型式对散热器空气侧流场的影响,获得了最优的矩阵风扇型式[5-6]。
到目前为止,一些较为先进的车辆冷却系统已经开始使用PID控制器对风扇转速进行调控,但控制效果不佳[7]。因此寻找稳定、可靠、精度高的控制策略依然是车辆热管理技术研究的主要内容之一。随着自动化控制理论的不断成熟和发展,智能化控制在工业领域的应用愈发普遍,其中,模糊控制是通过总结现有的操作经验或大量的操作数据,并使用自然语言表述的控制策略[8]。该控制器最大的优势是无须提前获知被控系统的数学模型,特别适用于具有非线性、滞后性和耦合性的复杂被控系统。目前已有针对电子节温器和电子水泵的模糊控制研究[9-11],结果表明在模糊控制器作用下,电控部件能进一步提升冷却系统的效能。另一方面,虽然矩阵风扇的应用已较为广泛,但对其控制策略的研究仍较少。因此,本文中基于矩阵风扇型式研究如何利用模糊控制优化前端冷却模块。
1 仿真模型
1.1 模型的建立
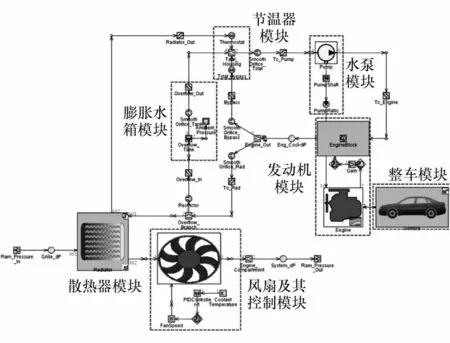
图1 发动机冷却系统一维模型
为开展冷却风扇的智能化控制研究,参考某实车在GT-SUITE中建立发动机冷却系统的一维仿真模型,如图1所示。该模型包含发动机、水泵、节温器、膨胀水箱、散热器和风扇等6个模块。其中散热器模块采用主从式换热器模型,其参数如表1所示,此外还须输入由台架试验获得的水侧和空气侧的压降和换热性能数据[12]。由于本文中主要研究对象为冷却风扇,故将节温器开度设为100%,使流出发动机的冷却液完全流经散热器芯体,模型仅考虑冷却液流经节温器所产生的压降。
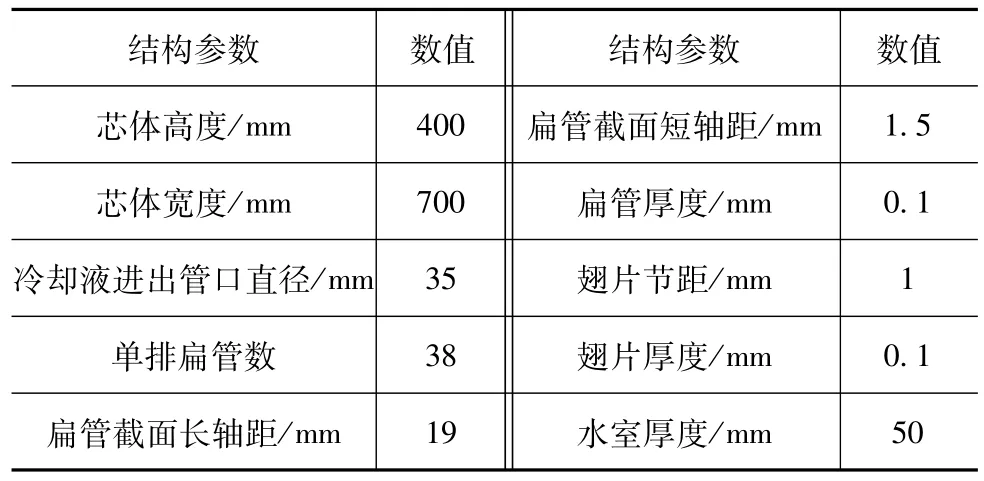
表1 散热器结构参数
为模拟水泵和风扇对冷却液和冷却空气流动状态的影响,须在模型中输入相关的性能数据。该数据主要由零件的台架试验测得,包括不同转速下,水泵和风扇的压升和效率与流量之间的关系,如图2和图3所示。
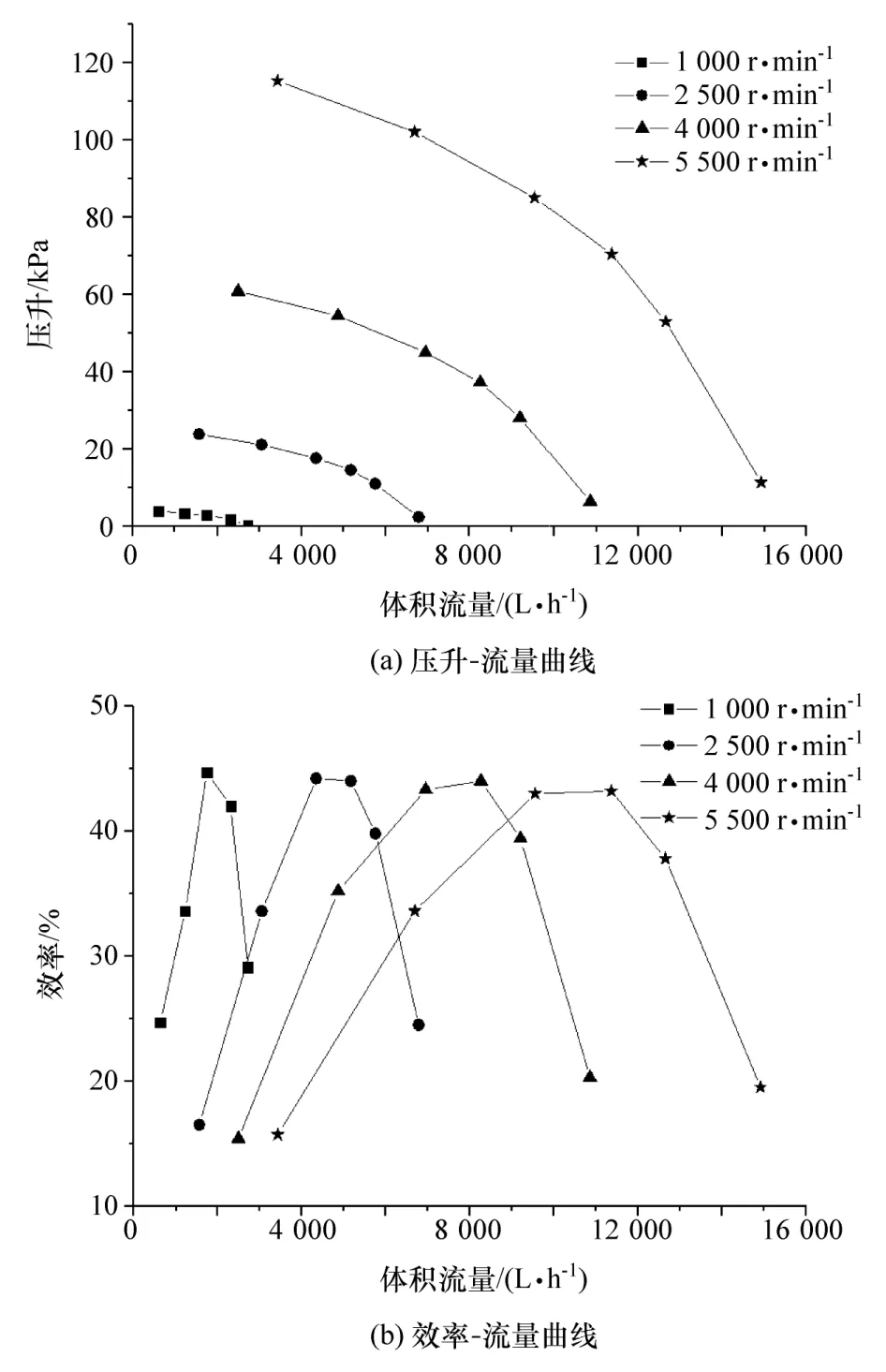
图2 水泵基础性能
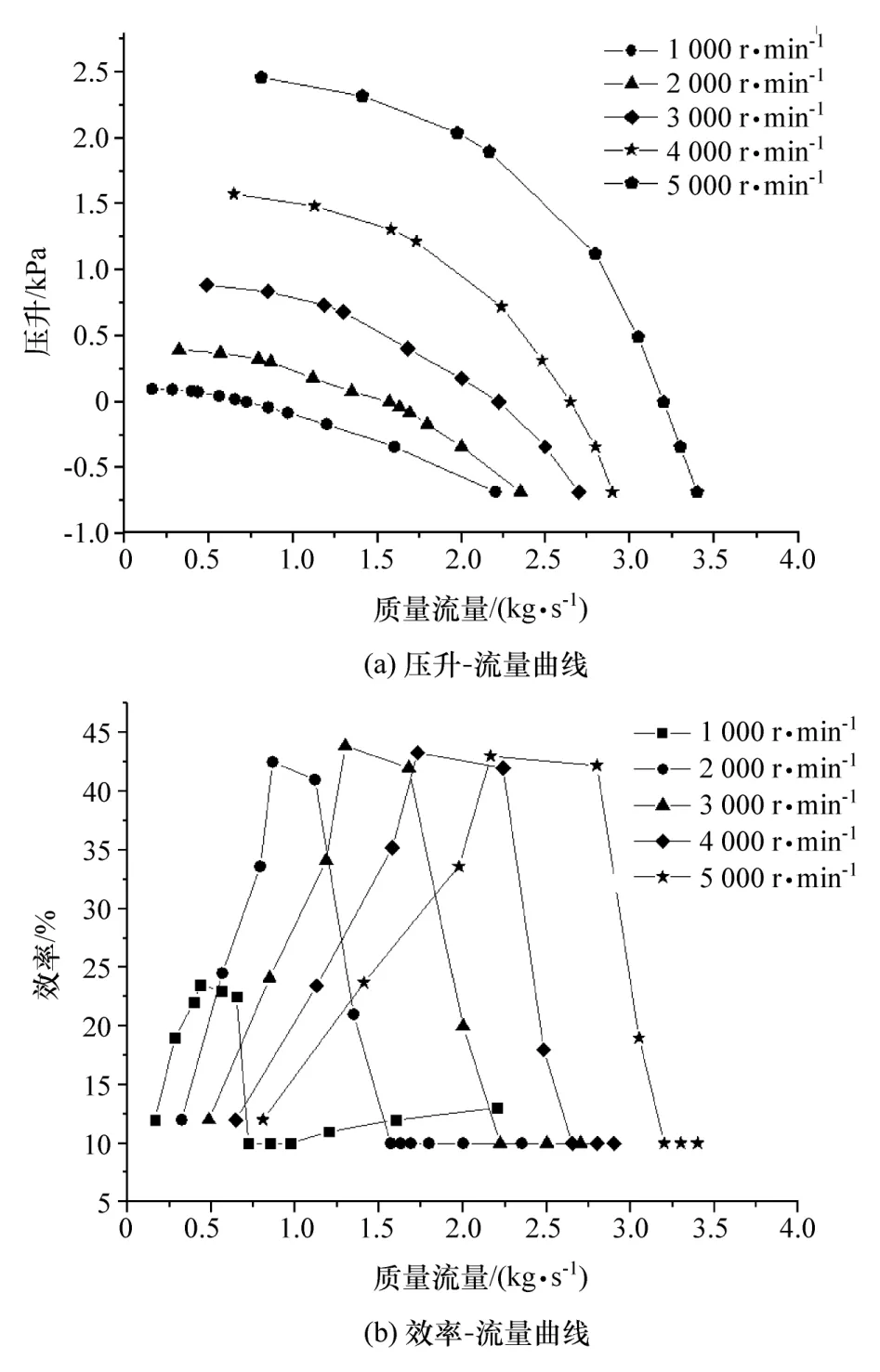
图3 风扇基础性能
发动机模块在该系统模型中的作用是根据车辆的运行工况,模拟实时传递到冷却系统中的热量,即将从发动机热平衡试验中得到的散热器在不同负荷和转速工况下的散热量输入至发动机模块,生成散热量MAP图,如图4所示。
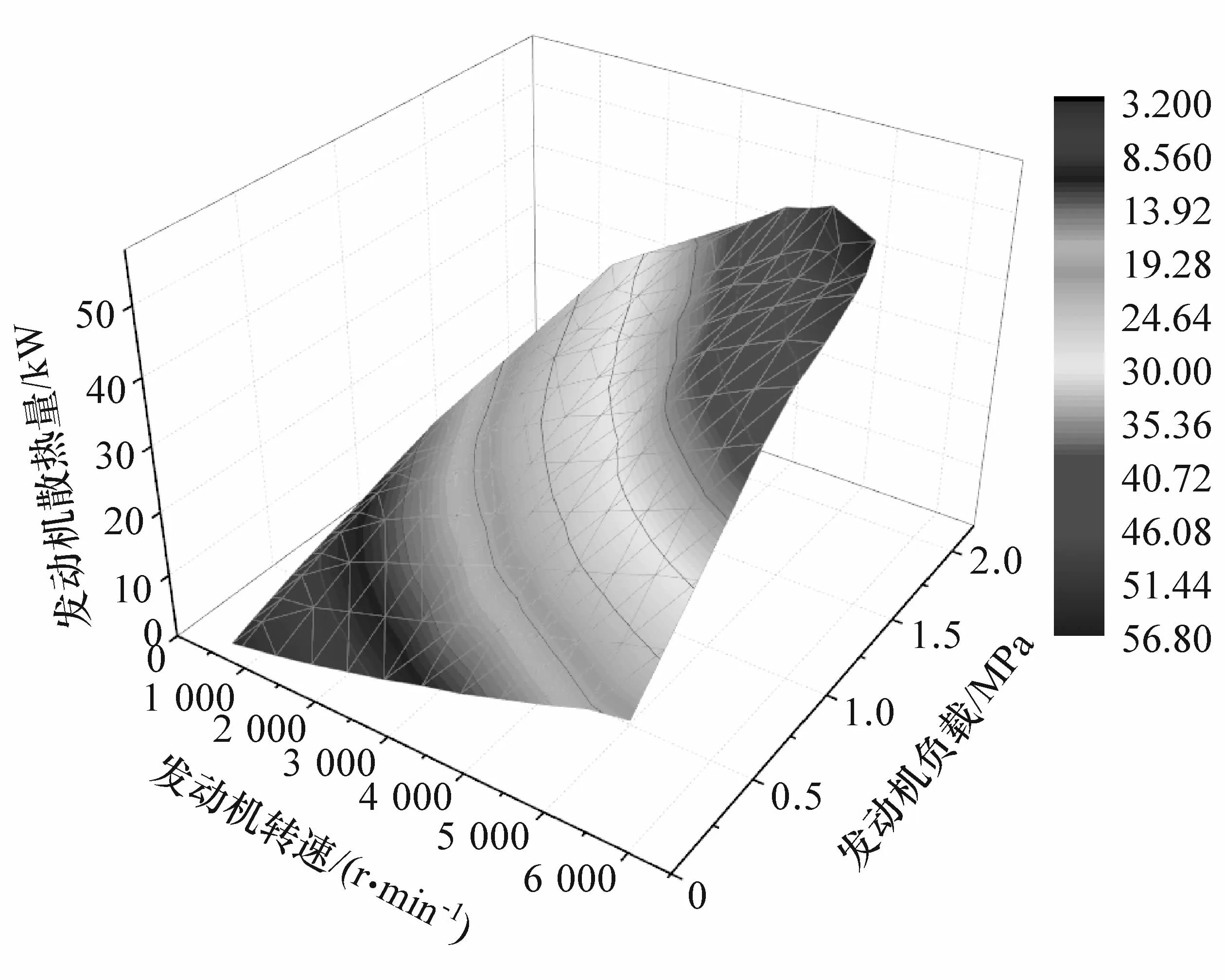
图4 冷却系统散热量MAP图
1.2 模型的验证
按图1建立一维冷却系统模型后,首先须对模型精度进行验证。这里选取该车辆在NEDC工况(4个市区工况,共780 s)下发动机出水口温度进行对比,如图5所示。
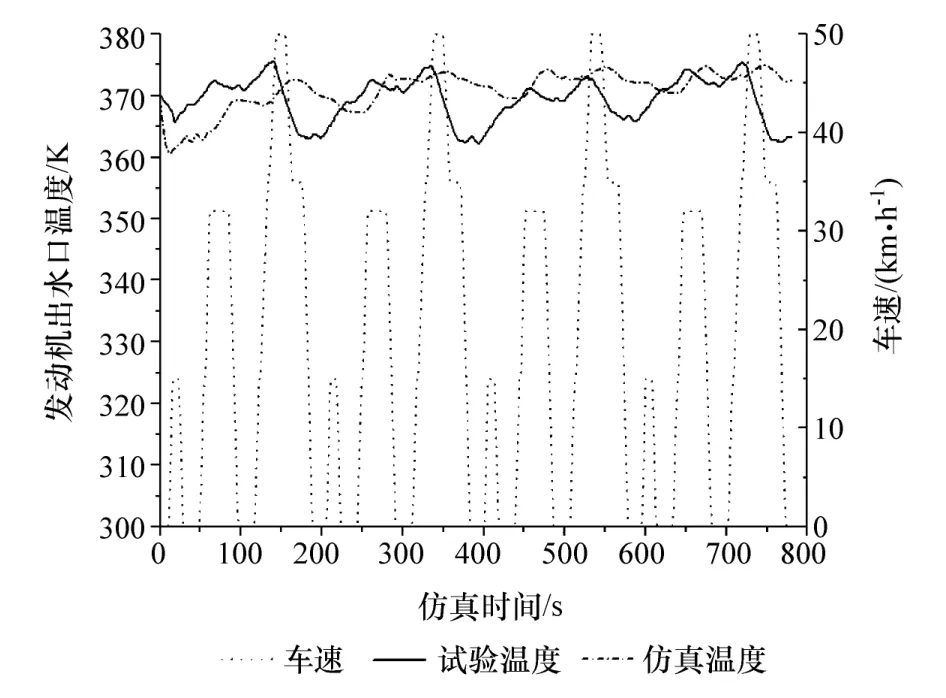
图5 发动机出水口温度仿真与试验对比
从发动机出水口温度的变化可以看出,仿真与试验结果皆能很好地跟随车辆负荷状态的变化,两者之间的变化趋势相同。车辆起步时,发动机出水口温度首先下降,随着发动机输出负荷增加,水温逐渐回升,之后随着车速的变化不断在一定温度区间内波动。可以推断本文中所建立的一维冷却系统模型满足仿真精度要求。
最后参照文献[6]中的研究结论,在该车单风扇一维冷却系统的基础上引入六风扇矩阵模型,矩阵中6个小风扇采用2×3的布置型式,各小风扇的模型参数见表2。
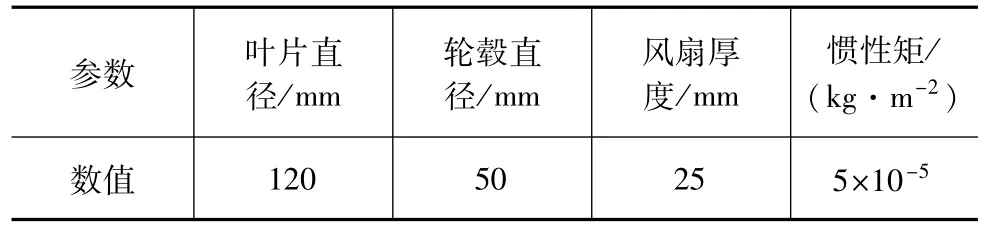
表2 风扇结构参数
1.3 模糊控制器的设计
本文中控制器的设计目标是根据反馈的发动机出水口温度调整风扇转速,以适应实时的散热需求。为进一步提高控制器精度,取发动机出水口温度与目标温度的差值e及其变化率ec作为控制器输入信号。此外,将冷却风扇的转速增量Δu作为模糊控制器的输出量。之后将输入量和输出量进行模糊化,划分为7个模糊集,温差e、温度变化率ec和转速增量Δu的模糊集E、EC和U如下。

式中:NB表示实际温度比目标温度低9℃左右;NM表示实际温度比目标温度低6℃左右;NS表示实际温度比目标温度低3℃左右;Z0表示实际温度与目标温度基本相等;PS表示实际温度比目标温度高3℃左右;PM表示实际温度比目标温度高6℃左右;PB表示实际温度比目标温度高9℃左右。

式中:NB表示一个采样周期内出水口温度降低2℃左右;NM表示出水口温度降低1℃左右;NS表示出水口温度降低0.5℃左右;Z0表示出水口温度基本不变;PS表示出水口温度升高0.5℃左右;PM表示出水口温度升高1℃左右;PB表示出水口温度升高2℃左右。

式中:NB表示冷却风扇转速降低200 r/min左右;NM表示冷却风扇转速降低100 r/min左右;NS表示冷却风扇转速降低50 r/min左右;Z0表示冷却风扇转速保持不变;PS表示冷却风扇转速升高50 r/min左右;PM表示冷却风扇转速升高100 r/min左右;PB表示冷却风扇转速升高200 r/min左右。
同时选择三角型隶属函数对模糊集式(1)~式(3)中的语言值定义置信度。最后对控制器的模糊规则进行设计,根据冷却风扇转速的最优控制目标,本文中在设计模糊控制规则前首先确立了以下5条基本原则:
(1)当发动机冷却液出口温度低于目标温度且温度有下降趋势时,风扇转速应大幅降低,以减小通过冷却模块的空气流量;
(2)当发动机冷却液出口温度小于目标温度且温度有上升趋势时,此时系统本身已有减少偏差的趋势,为尽快消除偏差且避免超调,风扇转速应小幅减小,使发动机冷却液温度能较快接近目标温度;
(3)当发动机冷却液出口温度等于或接近目标温度时,且温度变化趋势较小,风扇转速应保持不变;
(4)当发动机冷却液出口温度高于目标温度且温度有下降趋势时,风扇转速应小幅增加,使发动机冷却液温度能够较快地接近目标温度;
(5)当发动机冷却液出口温度高于目标温度且温度有上升趋势时,风扇转速应大幅提升,以增加通过冷却模块的空气流量。
对以上控制规则采用Mamdani法进行模糊推理,再经过解模糊后便可得到输入量e和ec与输出量Δu之间的函数对应关系,如图6所示。
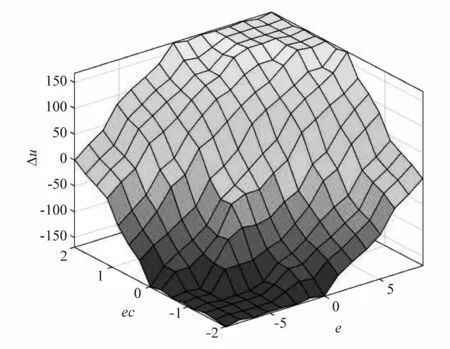
图6 模糊控制器MAP图
1.4 联合仿真模型的建立
利用Simulink中的模糊控制模块创建模糊控制器模型,并将S函数块‘GT-Suite Model RTW’指向1.1节建立的一维冷却系统模型,最后利用编译器将该模型编译成动态链接库文件(*.dll),该文件可被 GT-Suite中的‘SimulinkHarness’模块调用[13]。通过GT-Suite与Simulink的联合仿真可实现对冷却风扇转速的实时模糊控制,仿真流程如图7所示。
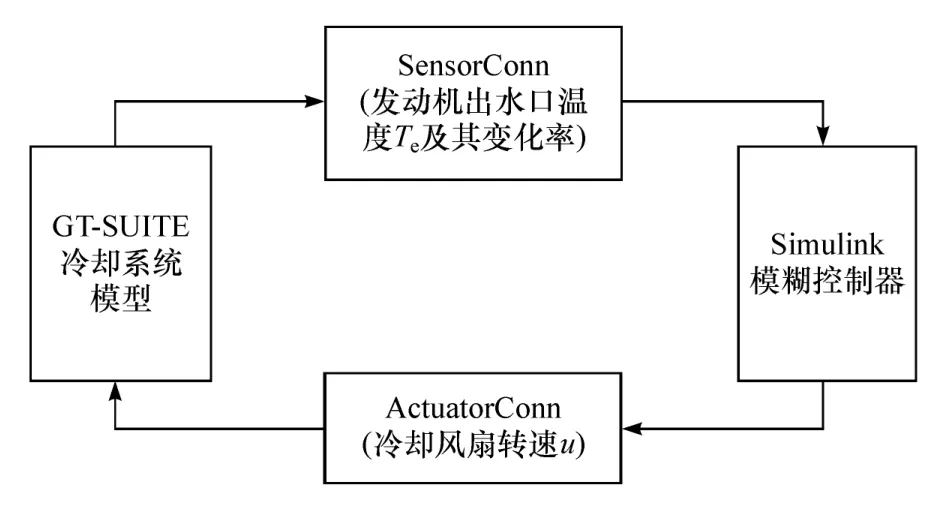
图7 冷却风扇模糊控制的联合仿真
2 矩阵风扇多运行模式设计
2.1 不同运行模式下冷却系统性能对比
为实现矩阵风扇的智能化控制,首先须明确矩阵风扇不同运行模式与自身综合性能的关系,即确定散热器换热量Q和矩阵风扇消耗功率P与运转风扇的数目和转速之间的关系:

式中:N为风扇运转数目;n为风扇转速。根据冷却液流向及其进、出口位置,可将散热器芯体划分为6块温度不同的区域,共设计6种不同的组合运行模式,如图8所示,阴影区域表示风扇开启。首先开启矩阵下方的风扇,为保证换热效率,下方3个小风扇中优先开启温度较高区域对应的风扇。
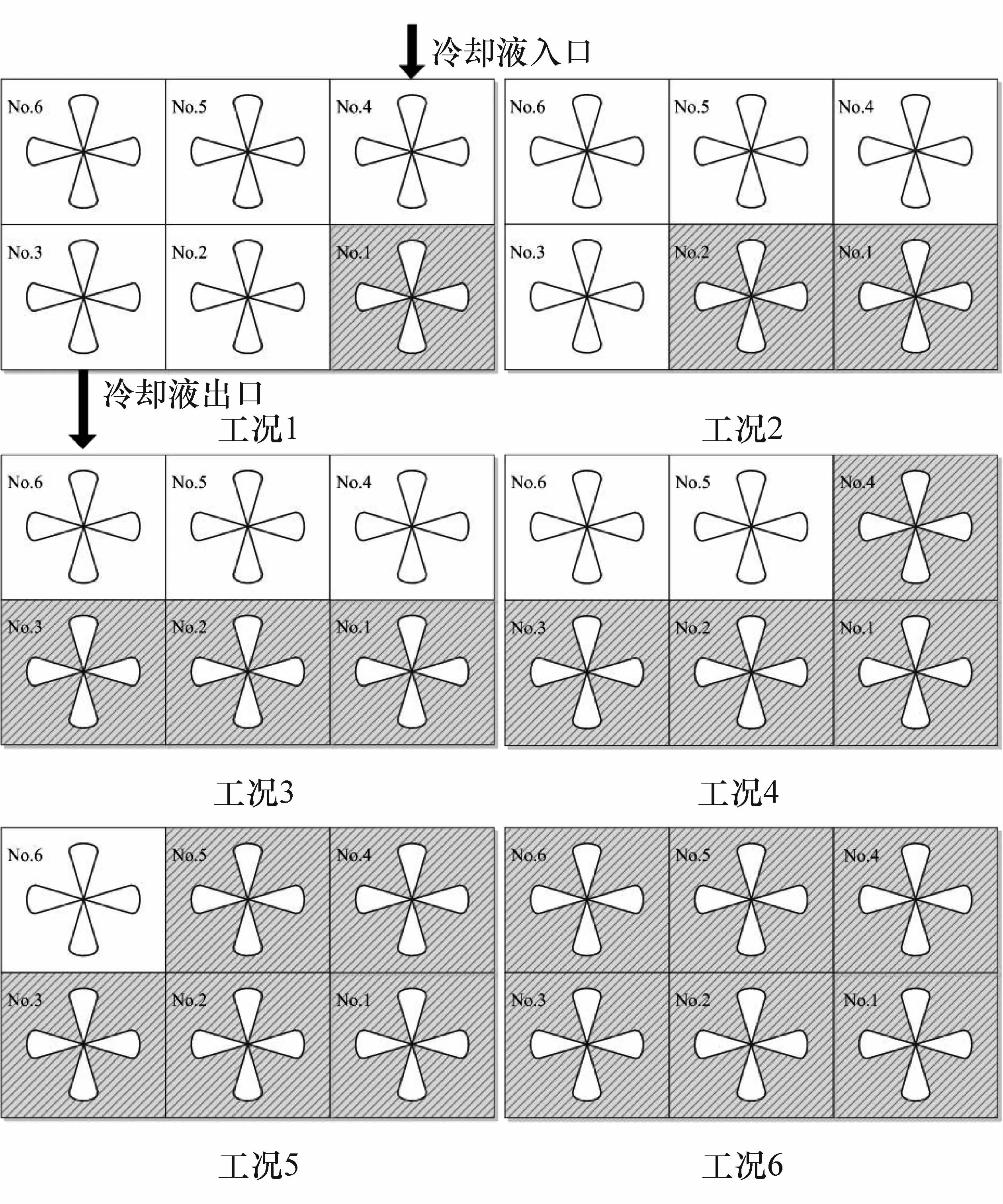
图8 矩阵风扇不同组合运行模式
通过计算每种组合模式下矩阵风扇N=6以不同转速运行时的散热器换热量和风扇能耗,风扇运行转速区间为1 000~3 000 r/min,每间隔500 r/min设置一个工况点,共30个工况点。每种工况下,散热器冷却液入口温度设为370 K,入口压力为0.2 MPa,冷却液流量为 0.916 kg/s,环境温度为300 K,水泵转速为2 500 r/min,行驶车速为10 km/h,各工况仿真时长均为200 s。
图9所示为矩阵风扇在不同运行模式下的能耗对比。可以看出,随着运转风扇数目和转速的增加,矩阵风扇的能耗逐渐上升,当运转风扇数目一定时,矩阵风扇能耗随着转速的升高呈指数型增长。图10为不同运行模式下散热器的散热量。由图可见,运转风扇数目和转速的增加提升了通过散热器芯体的冷却空气流量,使芯体换热量增大。当运转风扇数目一定时,矩阵风扇所实现的换热量随着转速的提升呈近似线性增长。
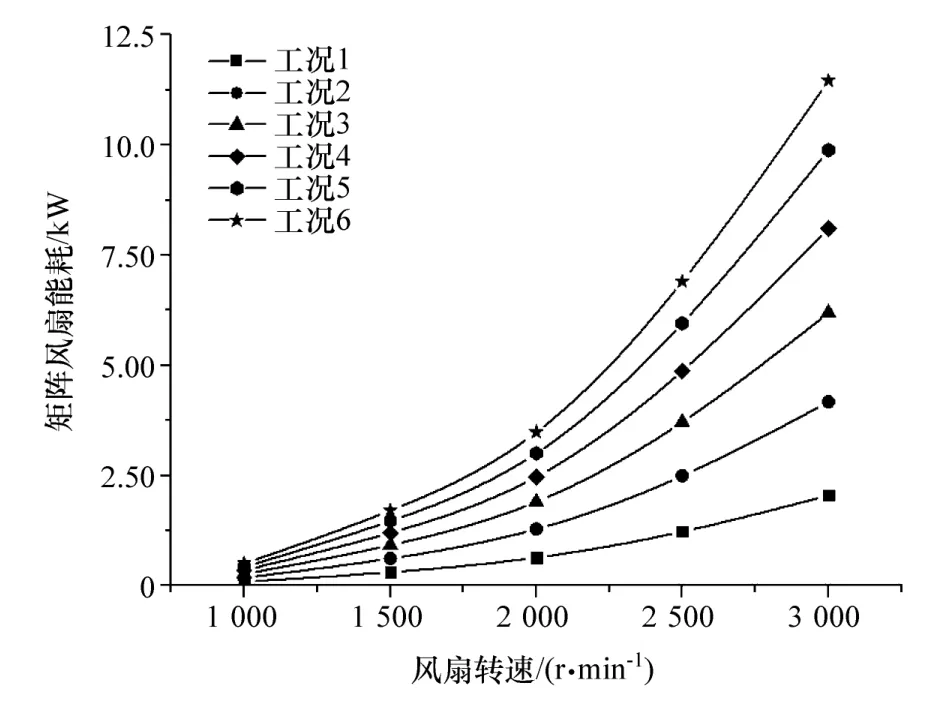
图9 不同运行模式下矩阵风扇能耗
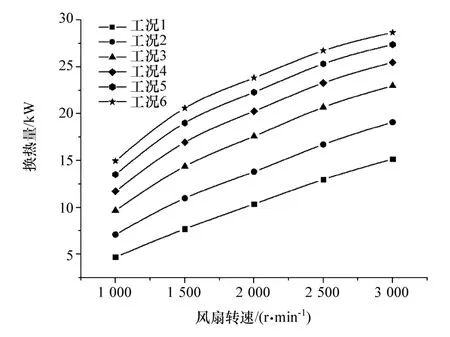
图10 不同运行模式下散热器换热量
在得到不同运行模式下矩阵风扇的能耗及其所实现的换热量后,即可得到两者之间的关系曲线,如图11所示。由图可见,在给定散热器换热量时,矩阵风扇可有不同的运行模式以实现目标换热量。如当目标换热量为10 kW时,可选择3种矩阵风扇运行模式:(1)风扇 No.1独自以 2 000 r/min运转;(2)风扇 No.1和 No.2同时以 1 300 r/min运转;(3)风扇 No.1、No.2和 No.3同时以 1 000 r/min运转。但可以看出,不同运行模式下矩阵风扇的能耗不同,且工况3<工况2<工况1。
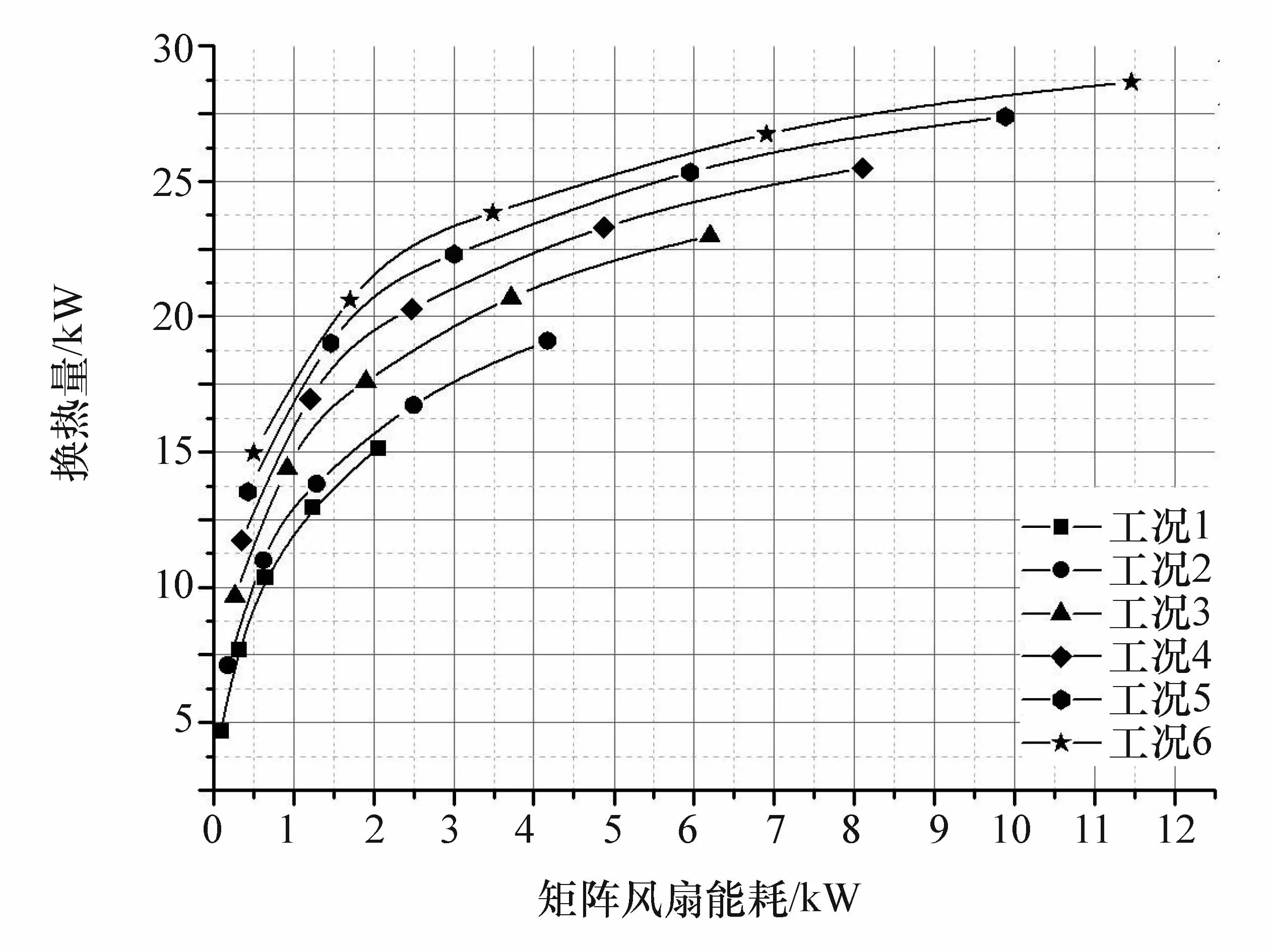
图11 不同矩阵风扇能耗下散热器实现的换热量
因此,当将散热器换热量Q作为目标输入参数时,通过选择适当的矩阵风扇运行模式,可以实现在满足换热需求的前提下降低风扇能耗的优化目标。根据图11的结果,可推出矩阵风扇运行模式的控制策略,如表3所示。
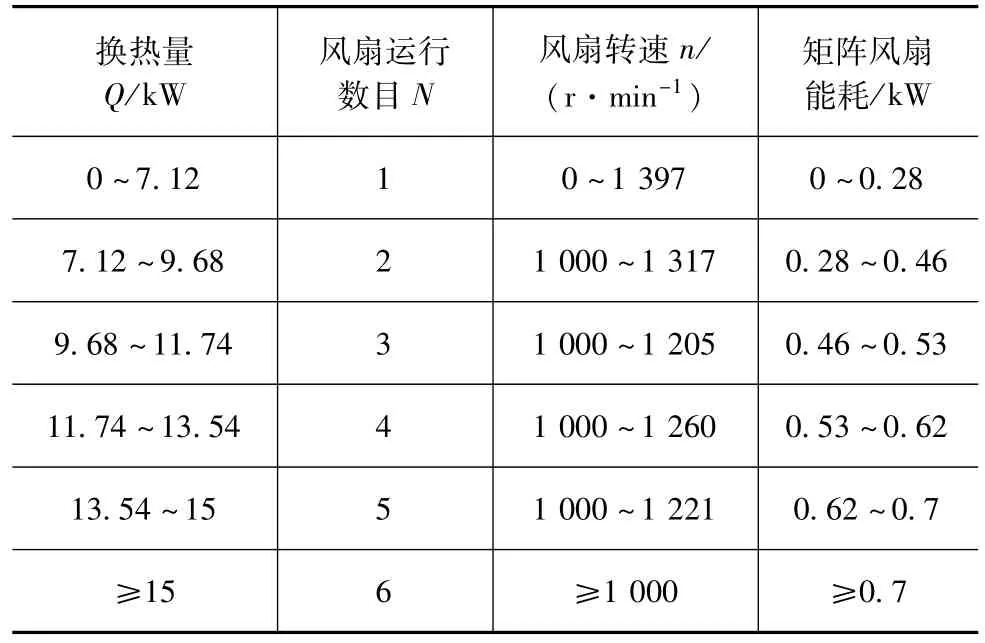
表3 矩阵风扇运行模式控制策略
2.2 矩阵风扇模糊控制器的设计
由表3可知,不同的换热量区间对应的矩阵风扇运行模式不同。为便于多运行模式控制器的设计,对不同区间内的风扇转速进行独立控制:

式中 ni(i=1,…,6)分别为运转风扇数目为 1,…,6时的转速。由于存在6种不同的组合运行模式,故须设计6个模糊控制器,如图12所示。对于Controller i(i=1,…,6),仅对风扇 No.1,…,No.i的转速输出进行模糊控制设计,设计方法同1.3节,而风扇 No.i+1,…,No.6的转速则设为 0。此外,增加端口选择模块,根据反馈信号选择相应的运行模式端口。为提高控制精度,此处将控制器模型中的基础转速下调至1 000 r/min。
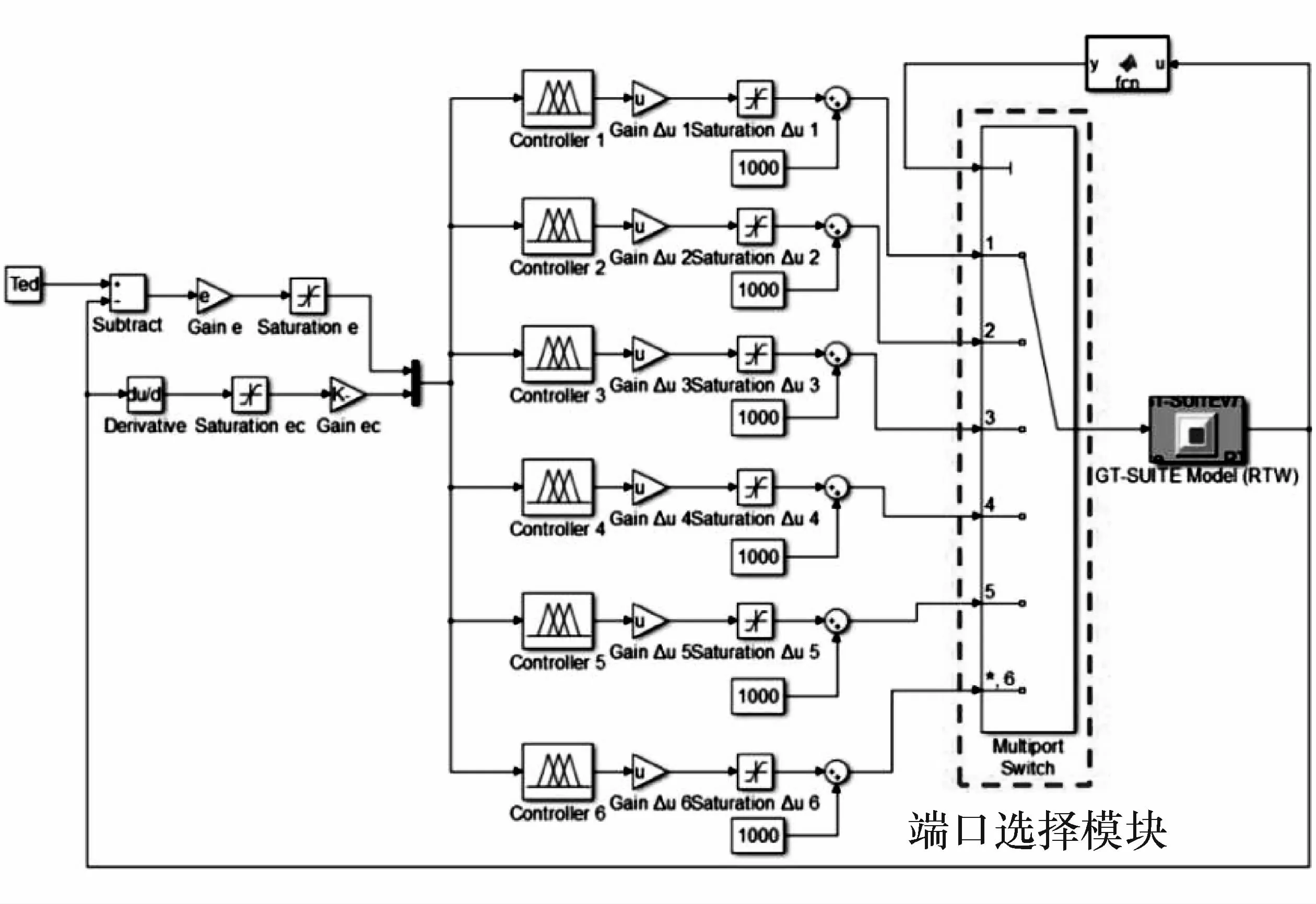
图12 基于多运行模式的矩阵风扇模糊控制器模型
3 结果分析
3.1 单运行模式下矩阵风扇模糊控制器的性能
虽然对于安装矩阵风扇的冷却系,采用多运行模式是自然而合理的选择,但由于控制复杂,目前许多搭载矩阵风扇的客车仍然采用单运行模式,即多个风扇全部以同一转速运转或全部关闭。为此,首先分析单运行模式下,模糊控制器对冷却风扇性能的影响,并将其引入NEDC循环工况与实车采用的3挡开关式控制器进行对比。由于NEDC工况中的市郊工况速度较高,冷却风扇利用率较低,本文中不予考虑,仅对4个市区工况进行模拟,仿真时长共计780 s。仿真得到的发动机出水口温度和风扇能耗随时间的变化曲线分别如图13和图14所示。
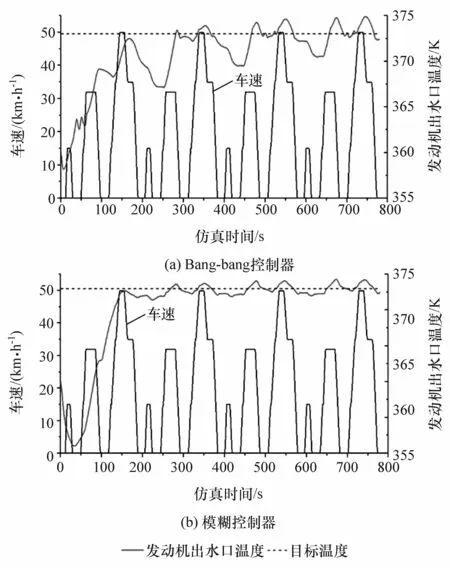
图13 不同控制器下发动机出水口瞬态温度变化
由于车辆起步阶段发动机传递到散热器的热量较小,发动机出水口温度在经历短暂下降后逐渐上升至目标温度,之后在控制器的作用下围绕目标温度波动。由图13可以看出:在Bang-bang控制器作用下,发动机出水口温度波动剧烈,波动幅值达8.7 K;而在模糊控制器作用下,发动机出水口温度的波动幅值下降至2.1 K,降幅约达76%,因此其瞬态跟随目标温度的性能更优。
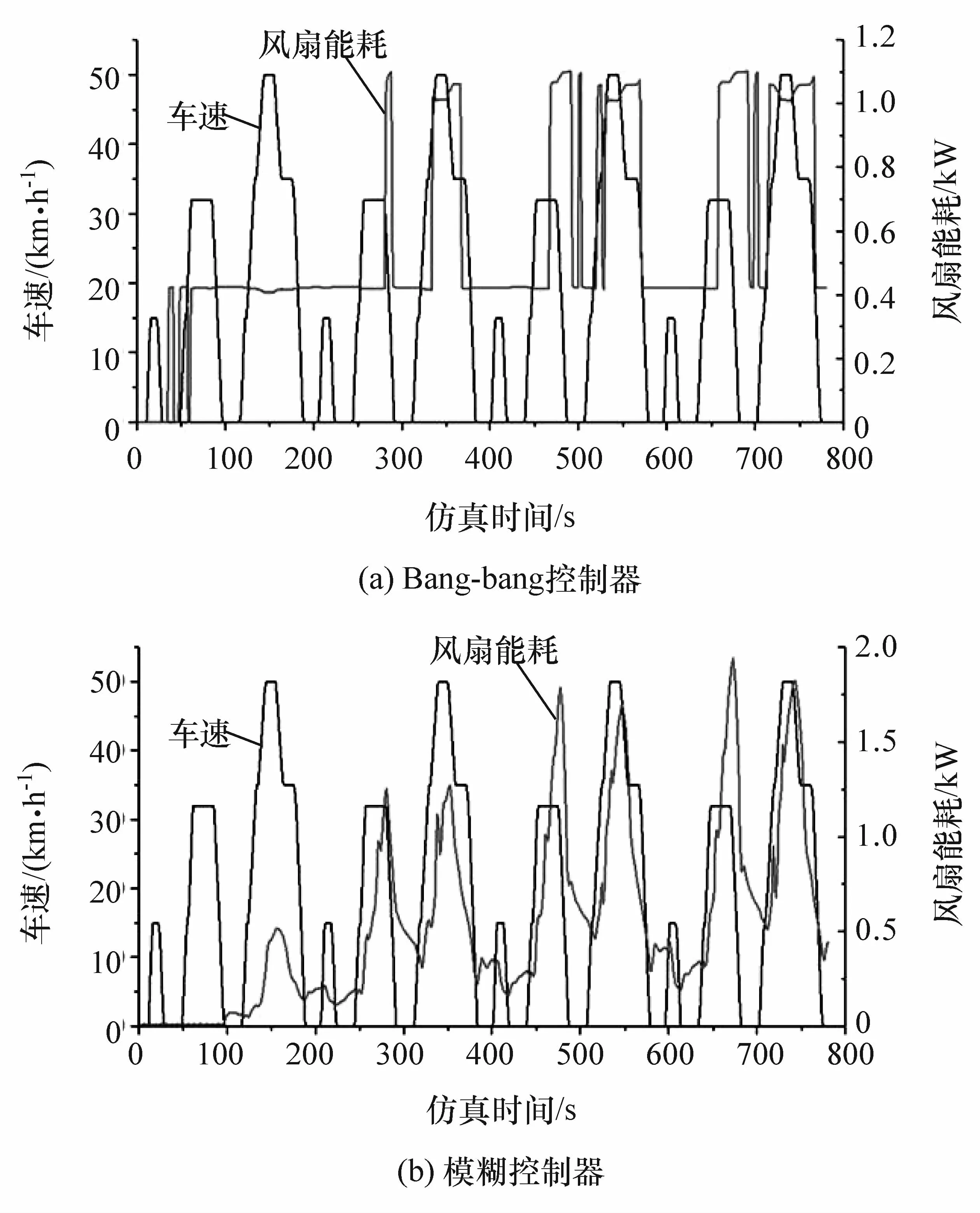
图14 不同控制器下风扇瞬态能耗变化
在风扇能耗方面(图14),各控制器的表现差异同样较大,在第一个市区工况中,由于车辆处于刚起步状态,风扇利用率较低。采用Bang-bang控制器时,由于其控制目标范围较窄,当发动机出水口温度上升至低速挡临界值时,风扇即开始在高、低速挡之间不断切换运行,直至循环结束,故风扇能耗相对较高,平均能耗为0.791 kW。而模糊控制器能根据车辆的实时负荷状态调整风扇转速,风扇能耗明显降低,整个过程中风扇平均能耗仅为0.544 kW,降低31.2%。综合以上两项指标可以看出,本文中所设计的模糊控制器在瞬态工况下具有较优的温度跟随能力且能够有效降低风扇运行能耗。
3.2 单/多运行模式下矩阵风扇模糊控制器性能对比
为对比模糊控制器在单、多运行模式下对矩阵风扇 的 性 能 影 响,针 对 [7.12,9.68]、[11.74,13.54]和[15,+∞]3个换热量区间,分别选取换热量9、13和20 kW作为目标值。发动机入水口温度设为360 K,其余仿真初始参数设置相同。
在多运行模式下,模糊控制器除根据反馈信号调整风扇转速外,还能以低能耗为目标实时调整运转风扇的数目。因此,多运行模式模糊控制器的温度控制精度更高,矩阵风扇的能效相应也较高。图15和图16给出了单/多两种运行模式下模糊控制器对发动机出水口温度和矩阵风扇能耗的控制效果。对应的数据列于表4。
由图15和表4上半部可见,尽管在第2阶段中,多运行模式下的温度稳态误差比单运行模式稍大,但从3个阶段平均值看,总的来说,多运行模式下的温度稳态误差比单运行模式小30.5%。
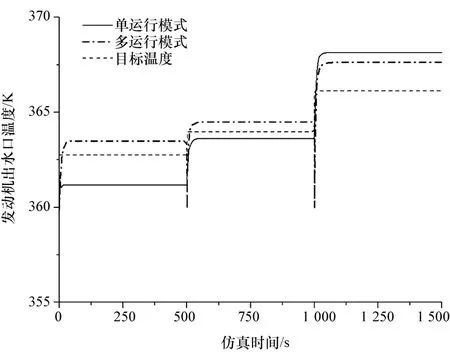
图15 发动机出水口温度对比
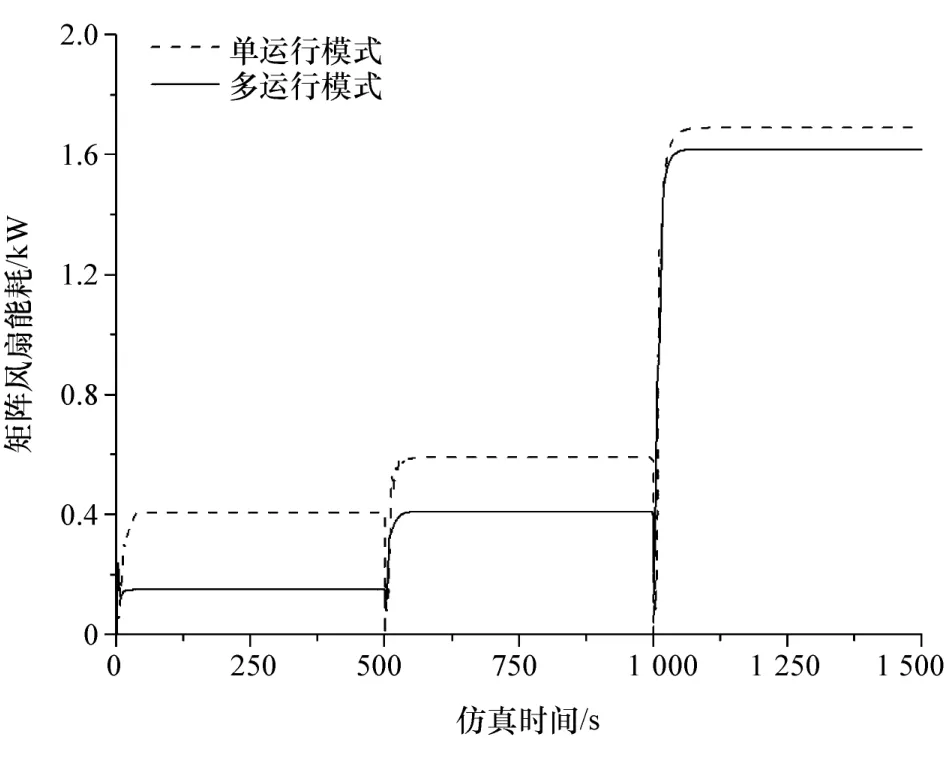
图16 矩阵风扇运行能耗对比
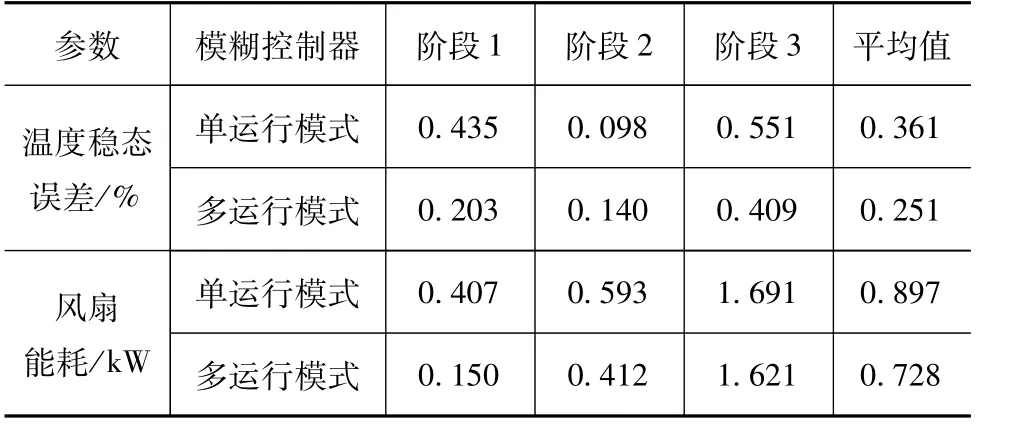
表4 单/多运行模式矩阵风扇控制器性能对比
各阶段中,稳态误差最大差值产生在最低换热量37%阶段。
由图16和表4下半部可见,各阶段中,多运行模式下风扇能耗皆比单运行模式小,换热量越小,差值越大,换热量为9 kW时,多运行模式下风扇能耗比单运行模式降低63%。3个阶段平均降低18.8%。
4 结论
本文中通过建立发动机冷却系统与模糊控制器的联合仿真模型,研究了模糊控制策略对基于矩阵风扇的冷却系统性能的影响,得出如下结论。
(1)在瞬态工况下,采用模糊控制器的矩阵风扇系统能降低发动机出水口温度波动幅值。在能耗优化方面,模糊控制器能够将风扇系统能耗降低31.2%。
(2)基于矩阵风扇设计的多运行模式,模糊控制器根据反馈信号除能调整风扇转速外,还能以最低能耗为目标实时调整运转风扇的数目。
(3)多运行模式下的模糊控制器对目标温度的跟踪能力更优,对应的稳态误差比单运行模式的模糊控制器小30.5%。在能耗方面,多运行模式下风扇能耗比单运行模式平均降低18.8%。
综上所述,采用矩阵风扇型式并配合模糊控制策略能有效提升发动机热环境的稳定性,同时降低冷却系统能耗。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年12期)2022-07-05
核安全(2022年3期)2022-06-29
阅读(低年级)(2022年6期)2022-06-17
中国品牌(2021年6期)2021-08-06
科技视界(2020年19期)2020-07-30
南水北调与水利科技(2019年2期)2019-06-24
故事大王(2017年4期)2017-05-08
当代工人(2016年7期)2016-05-18
小雪花·成长指南(2015年10期)2015-10-23
