
含时滞悬架系统H∞控制的理论与实验研究*
2020-04-03 03:56纪仁杰方明霞李佩琳
汽车工程 2020年3期
纪仁杰,方明霞,李佩琳,闫 盖,3
(1.同济大学航空航天与力学学院,上海 200092; 2.劳士领汽车配件(昆山)有限公司,昆山 215000;3.上海第二工业大学工学部,上海 201209)
前言
悬架系统是汽车的重要组成部分,随着电子控制技术的发展和人们对汽车乘坐舒适性要求的提高,主动悬架正受到人们的广泛重视。但在汽车的主动控制过程中,由于信号采集、传输、控制器计算及作动器作动等因素,时滞不可避免。研究发现,即使是很小的时滞,对系统稳定性也会产生很大影响,甚至使系统失稳发散[1-2],但合理的时滞范围也会对控制系统产生积极影响。为减少其不利因素并充分利用时滞,目前众多学者对考虑时滞的控制系统动力学特性进行研究。文献[3]和文献[4]中采用离散最优控制方法研究了弹性板、弹性梁的多时滞振动控制问题,理论和实验结果均表明时滞控制律具有良好的控制结果。文献[5]中以柔性板为研究对象,开展时滞H∞控制研究,结果表明获得的H∞控制律能够有效地抑制板的弹性振动。文献[6]中对时滞隔振器的振动控制进行研究,采用时滞位移反馈改善了准零刚度隔振器的隔振性能。文献[7]中对时滞线性系统振动主动控制的最优化方法进行分析,研究发现考虑时滞的控制策略不仅能够较好地控制系统的峰值响应,而且能够保证系统的稳定性。文献[8]中采用有限频率法处理带有执行器输入延迟的主动悬架系统,设计了带有频带约束的主动悬架系统的状态反馈控制器,仿真计算验证了方法的有效性。文献[9]中采用平均法研究了含时滞的半主动天棚悬架系统的振动特性,得到了系统的近似解析解,并利用Lyapunov理论对该系统进行稳定性分析,发现含时滞系统的稳定性随时滞大小发生周期性变化。文献[10]中针对汽车主动悬架系统的输入时滞提出一种控制律,使得即使在存在时滞的情况下,闭环系统依然保持稳定。
综上所述,目前对考虑时滞的控制系统已进行了部分研究,并取得了一定的研究成果,但由于时滞量较小难以测定,目前对考虑时滞的控制系统进行实验研究相对较少,影响了研究结果的可靠性和精确性。为此本文中以考虑时滞的汽车2自由度悬架系统为研究对象,通过Lyapunov-Krasovskii泛函设计基于H∞鲁棒控制的时滞控制策略,并通过实验方法对时滞控制结果进行验证。本研究对考虑时滞的系统控制特性研究具有重要的促进作用。
1 悬架系统时滞动力学模型
本文中以赛欧轿车悬架系统为基础,以磁流变阻尼器为作动器,将系统简化为考虑时滞的2DOF悬架主动控制模型,见图1。
根据第二类拉格朗日方程,建立系统动力学方程如下:
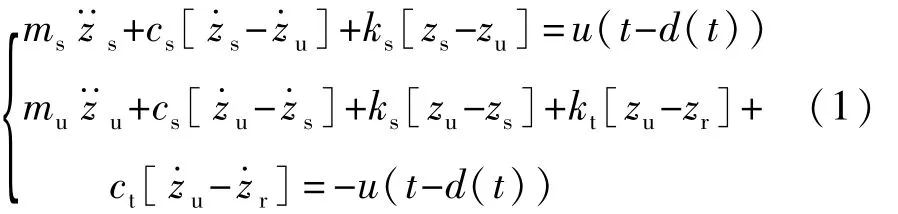
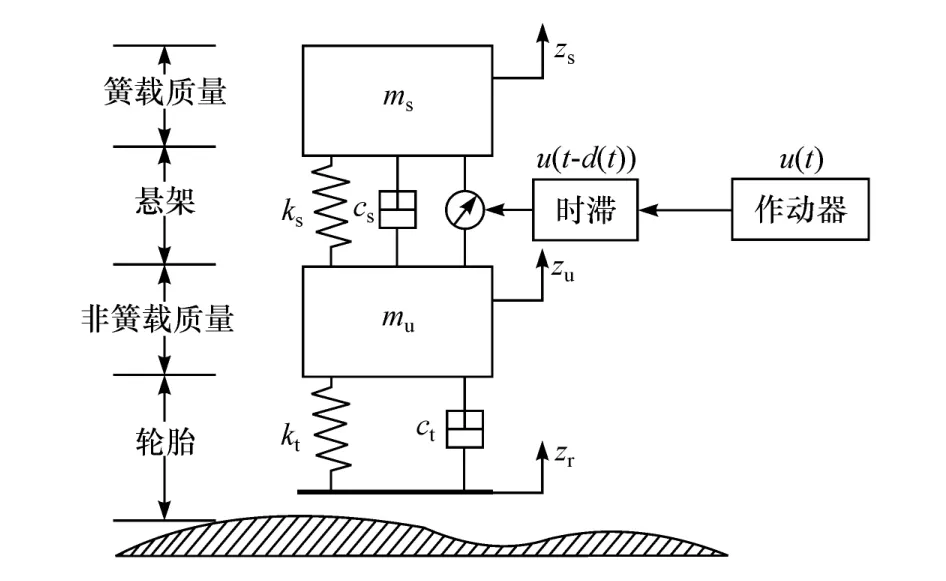
图1 2DOF悬架主动控制模型
式中:zs和zu为簧载质量和非簧载质量位移;zr为路面不平度;ms为簧载质量;mu为非簧载质量;cs和ks为悬架系统阻尼和刚度;kt和ct为轮胎的刚度和阻尼;u(t-d(t))为含时滞的主动悬架控制力,d(t)为时变的时滞量,其满足0<d(t)≤τ和d·(t)≤μ,τ、μ为时滞及其速度上界。
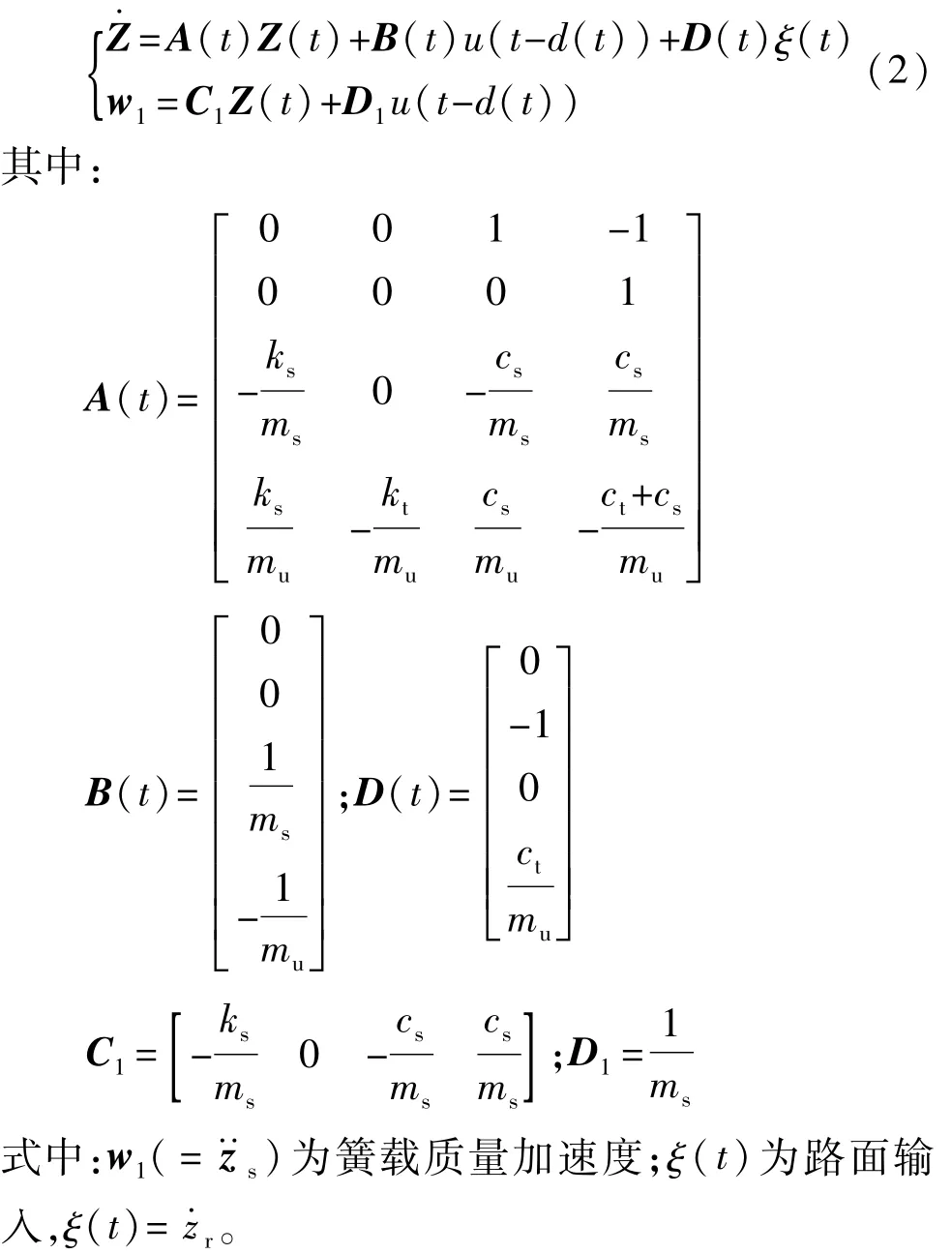
令状态向量Z(t)=[zs-zuzu-zrz·sz·u]T,则悬架系统的状态空间表达式为
向系统引入状态反馈:u(t)=KZ(t-d(t)),则式(2)状态方程变为

其中:Bk=BK,Dk=D1K
汽车主动悬架控制是典型的多目标控制,主要目标是针对主动悬架系统模型,设计控制策略,使得闭环控制的悬架系统能够满足如下条件。
(1)舒适性能够得到改善。乘坐舒适性通过簧载加速度的大小体现,为提高车辆的乘坐舒适性,主要目标是从干扰ξ(t)到输出w1(t)所对应的传递函数的H∞范数最小化。
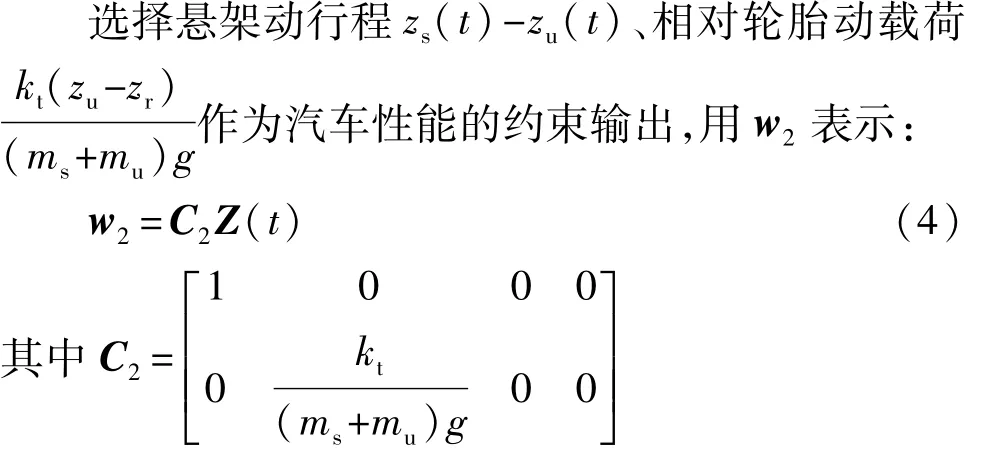
(2)悬架的相对行程需要得到约束。由于安全因素,悬架位移不应超过允许的最大值,即|zs(t)-zu(t)|≤zmax,其中 zmax为动行程最大限定位移。
(3)车辆安全性能满足要求。为确保车辆车轮与路面的接触不间断,动态轮胎载荷不应超过静态轮胎载荷,即 kt[zu(t)-zr(t)]<(ms+mu)g。
(4)执行器输出力不能超出其限制。悬架系统提供主动控制力的大小应该限定在一定范围内,即|u(t)|≤umax,umax为作动器允许的最大控制力。
针对上述性能要求,可将主动悬架的控制问题描述如下:设计一个内部稳定的控制器,使式(3)控制系统从干扰 ξ(t)到输出 w1(t)的 H∞范数最小,同时在时域内抑制w2和u,使其满足
|{w2(t)}q|≤{w2,max}q,
q=1,2,t>0,|u(t)|≤umax
2 考虑时滞的汽车悬架H∞控制策略
现采用状态反馈H∞控制策略来解决含时滞的主动悬架系统控制问题。
2.1 已知时滞上限求解H∞控制策略
为设计已知时滞上限的H∞控制策略,下面基于H∞控制理论,利用Lyapunov-Krasovskii泛函推导闭环时滞系统渐近稳定的矩阵不等式。
取如下Lyapunov-Krasovkii泛函:

式中P、Q、S、R为对称正定矩阵。
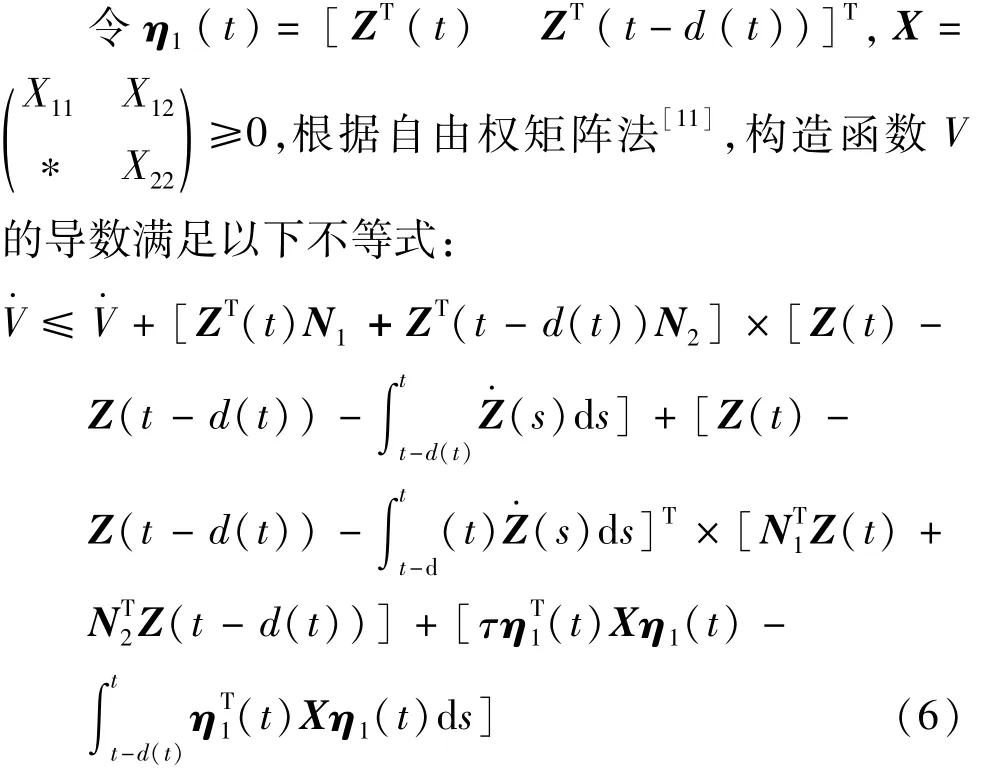
式中N1和N2为自由权矩阵。将悬架控制系统的状态方程式(3)代入式(5),化简整理后可得
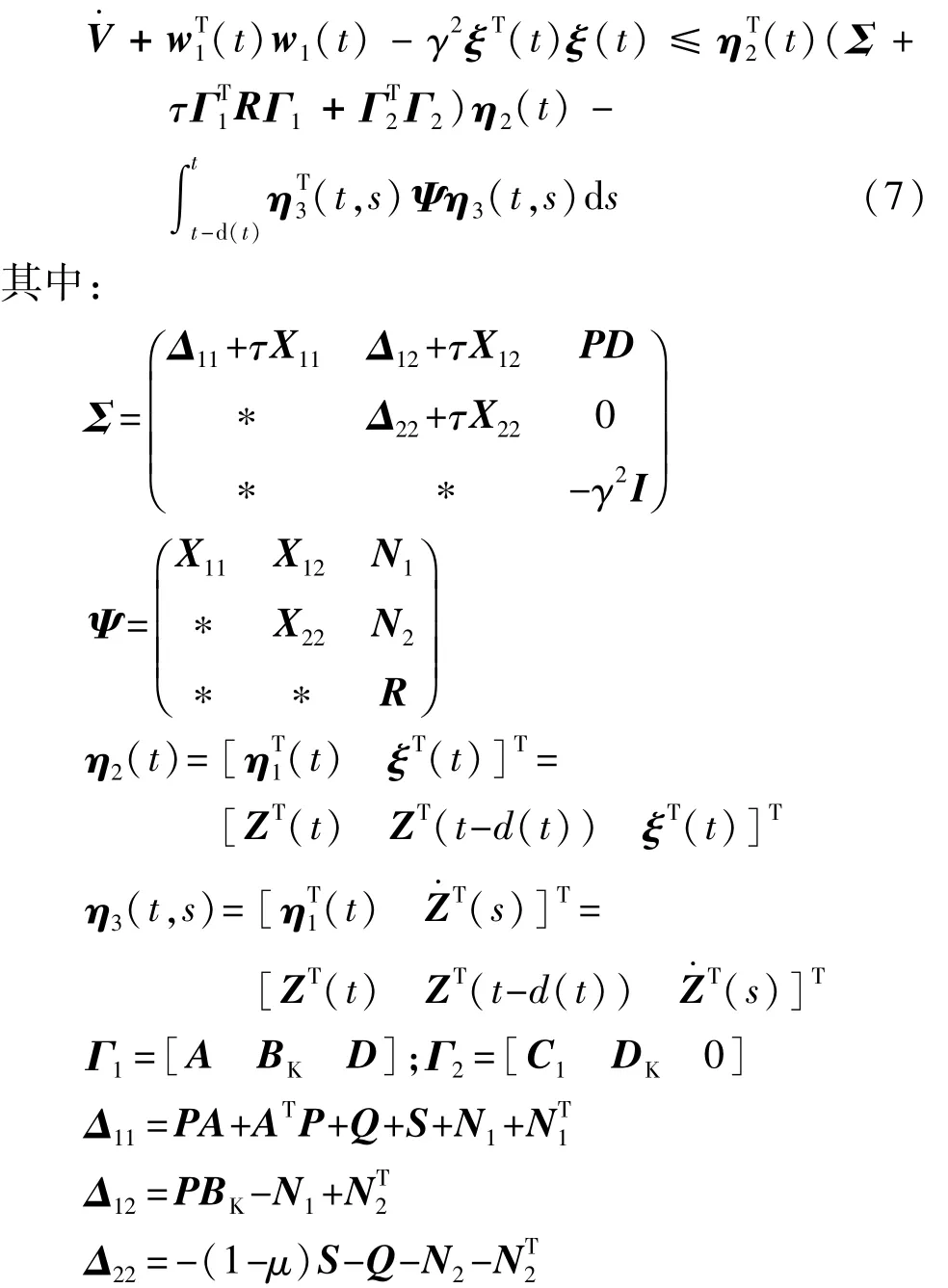
由式(7)可以看出,若
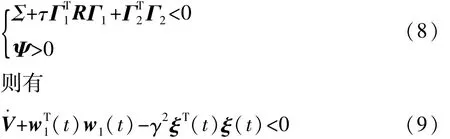
假设扰动输入为零,ξ(t)=0,则由式(9)得到V·(x(t))<0,由此可知闭环系统渐近稳定。
运用矩阵不等式的相关定理[12-13],可以证明,若满足式(10),则式(9)不等式成立。
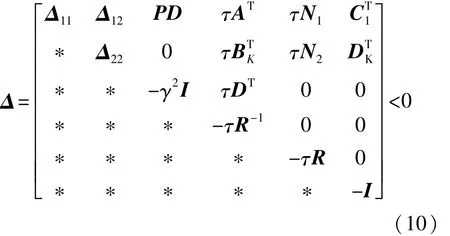
因此在计算反馈增益K时,可以直接利用式(10)进行分析。
因为V(+∞,Z(+∞))≥0,而在零初始条件下有 V(0,Z(0))=0,因此对式(9)两边积分,可得

对∀ξ(t)∈L2[0,+∞),由式(11)可导出‖w1(t)‖2<γ‖ξ(t)‖2,即簧载质量加速度具有H∞抑制水平γ。
此外,悬架系统需要满足输出约束和最大控制力约束,根据文献[14],有
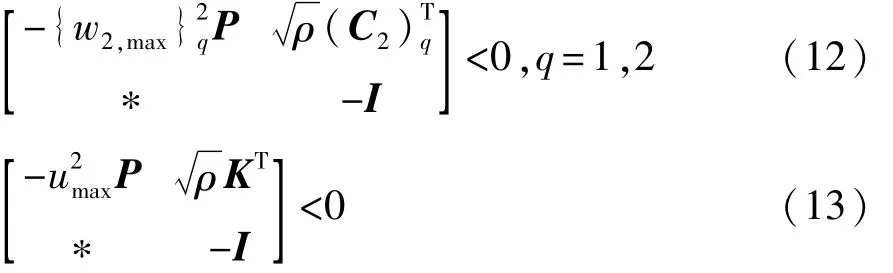
因此,当式(10)、式(12)和式(13)同时成立时,对所有满足0≤d(t)≤τ而且0≤d·(t)≤μ的时滞,闭环时滞系统渐近稳定。而且在零初始条件下,系统簧载质量加速度具有H∞抑制水平γ,且满足输出约束和最大控制力约束条件。
2.2 非线性矩阵不等式的处理
由于式(10)为非线性矩阵不等式,Matlab的LMI工具箱无法直接求解。因此采用参数调节法[11],得到一个与非线性矩阵不等式等价的新矩阵不等式。
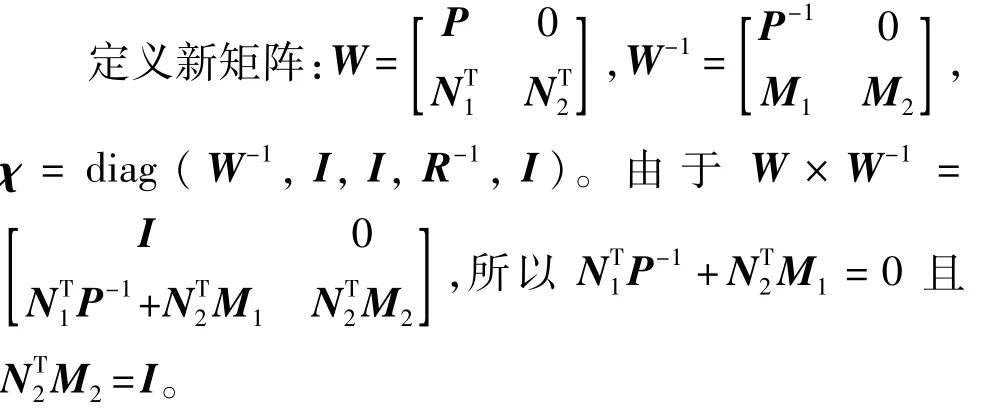
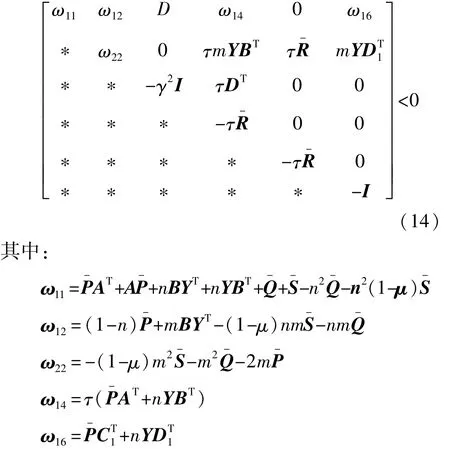
对式(10)左乘 χT,右乘 χ。令 M1=n P-1,M2=m P-1,其中 n和 m为实数,m≠0。记 P-=P-1,Q-=P-1QP-1,R-=R-1,S-=P-1SP-1,Y=P-1KT,则
同样对式(12)和式(13)进行合同变换,左乘diag{P-1,I},右乘 diag{P-1,I}。有
经上述变换后,式(14)、式(15)和式(16)均为线性矩阵不等式。根据2.1的推导,对于给定的τ>0,n∈R,m∈R,且 m≠0,如果存在具有合适维度的矩阵 P->0,Q->0,R->0,S->0以及 Y,使得矩阵不等式式(14)-式(16)成立,则对所有满足 0≤d(t)≤τ而且0≤d·(t)≤μ的时滞,闭环时滞系统渐近稳定。而且在零初始条件下,系统簧载质量加速度具有H∞抑制水平 γ,控制增益矩阵 K=YTP--1。
当系统最大稳定时滞量τmax已知,对于给定的n和m,以线性矩阵不等式H∞抑制水平γ最小为目标,目标函数可使用如下描述:

通过求解优化问题,寻求满足目标函数的矩阵,利用Y=P-1KT获得H∞控制增益系数K,然后代入式(3),即可对悬架控制系统的振动特性进行分析。
3 含时滞悬架系统振动特性分析
本节将采用数值方法对悬架控制系统的控制策略和振动特性进行分析,并在悬架时滞控制实验平台上对计算结果进行验证。悬架缩尺实验模型参数为:簧载质量 ms=136.05 kg,非簧载质量 mu=24.288 kg,簧载刚度 ks=10200 N/m,非簧载刚度kt=98000 N/m,簧载阻尼 cs=2100 N·s/m,非簧载阻尼ct=0 N·s/m。其中,ms和 mu通过直接称量获得,ks和kt由厂家通过专业测量仪器给出,而cs和ct则通过传递函数法进行参数识别获得。为获得控制系统中的固有时滞,将其分成两个部分,第1部分包括信号的采集、传输、处理和控制力计算所导致的时滞d1(t),可直接通过示波器读取,时滞量为37 ms;另一部分为作动器作动过程所产生的时滞d2(t),这一部分参考作动器厂家及他人研究提供的时滞量[15],取28 ms。则整个反馈回路固有时滞为d(t)=65 ms。
3.1 悬架时滞控制系统振动特性的数值模拟
为便于分析对比,选取d(t)为65 ms进行仿真分析,悬架参数取悬架缩尺模型参数。τmax=70 ms,利用式(17)得到 70 ms对应的 Y=[1.2619,-0.9961,-3.5670,30.1908],由 Y=P-1KT得到反馈增益系数 K=[7625,-53328,1402,-395]。将u(t)=KZ(t-0.065)代入式(3),在 MATLAB平台上进行仿真,得到τmax=70 ms时悬架系统控制前后的簧载质量加速度响应,见图2。从图中可以看出,通过施加反馈控制,簧载质量的加速度幅值从2.280 1减小到 1.890 8 m/s2,减少了 17.07%,说明悬架主动控制具有良好的减振效果。控制后系统的簧载加速度响应均方根值为1.337 0 m/s2。从图中还可看出,在考虑时滞情况下经H∞控制后系统的稳定性良好,未出现发散现象。
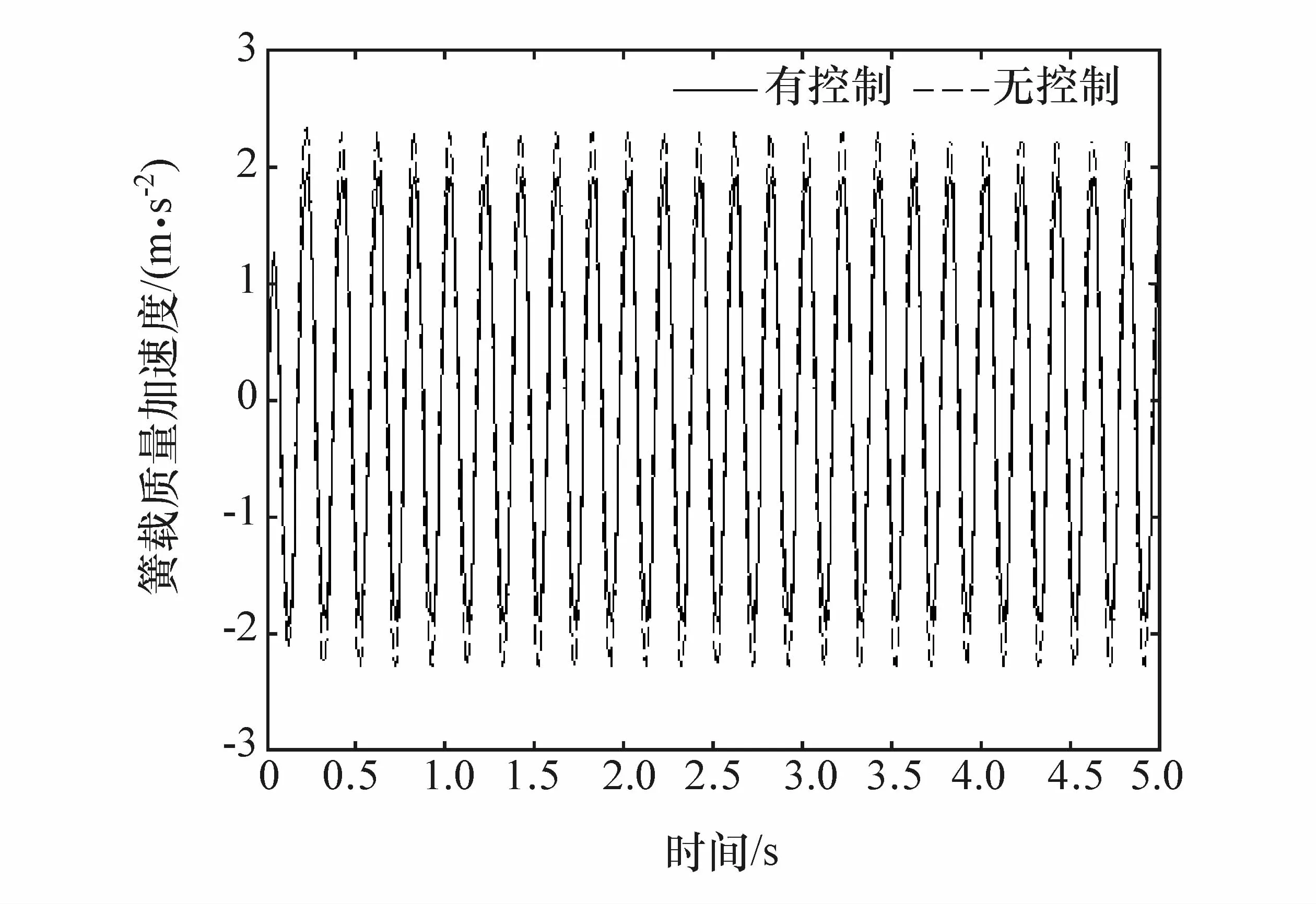
图2 τmax=70 ms时簧载质量加速度计算结果
同理,可以得到τmax=80 ms时的反馈增益系数K=[8270,-60110,1545,-535],簧载质量加速度响应见图3。施加反馈控制后,簧载质量的加速度幅值从2.280 1减小到1.893 6 m/s2,减少了16.95%。系统的簧载加速度响应均方根值为1.338 8 m/s2,略大于70 ms时的加速度均方根值。
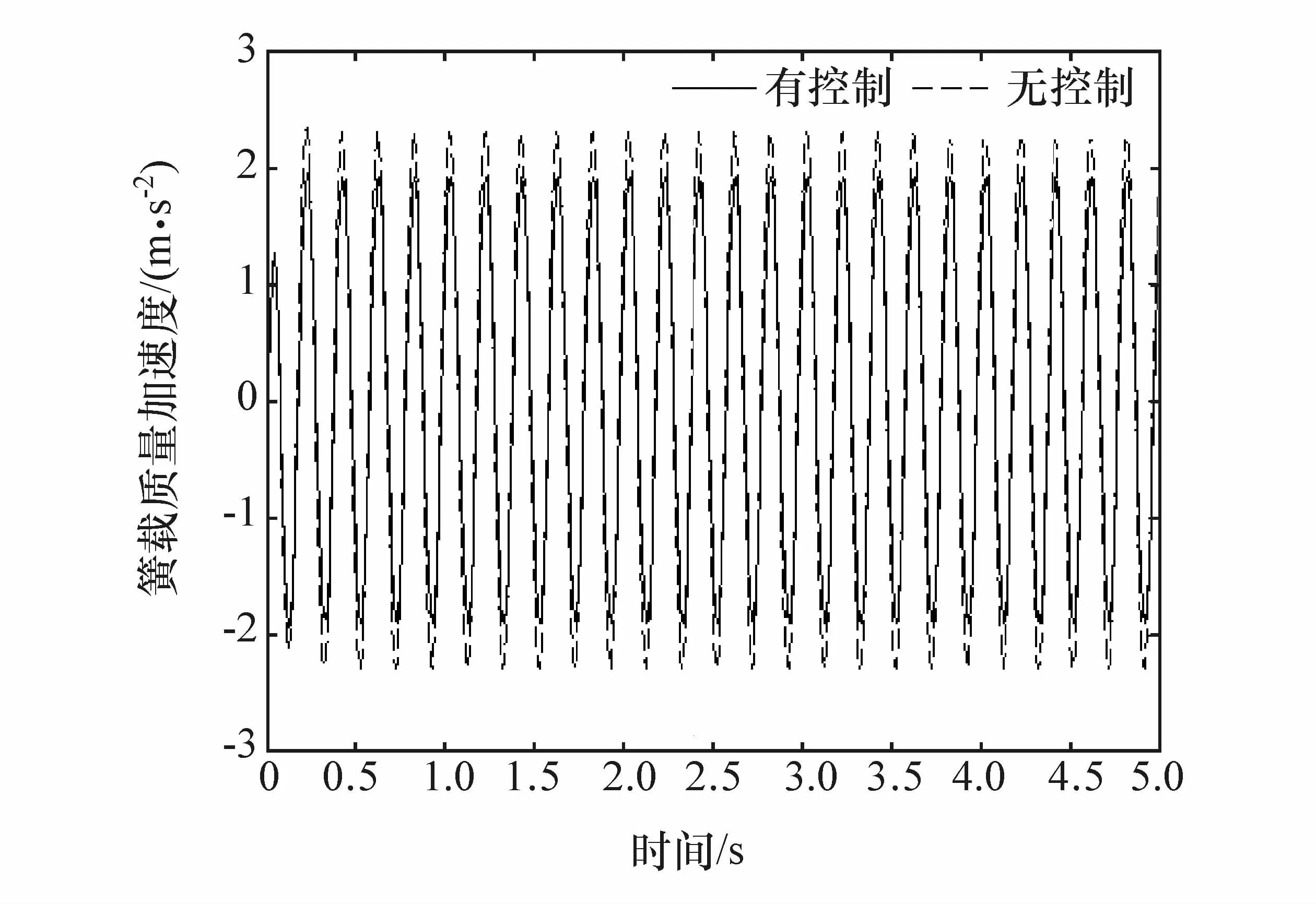
图3 τmax=80 ms时簧载质量加速度计算结果
3.2 悬架时滞控制系统的实验研究
为提高分析的可信度,在2DOF悬架时滞控制实验平台上对计算结果进行验证。搭建以磁流变阻尼器为作动器的悬架测控实验平台,如图4所示。
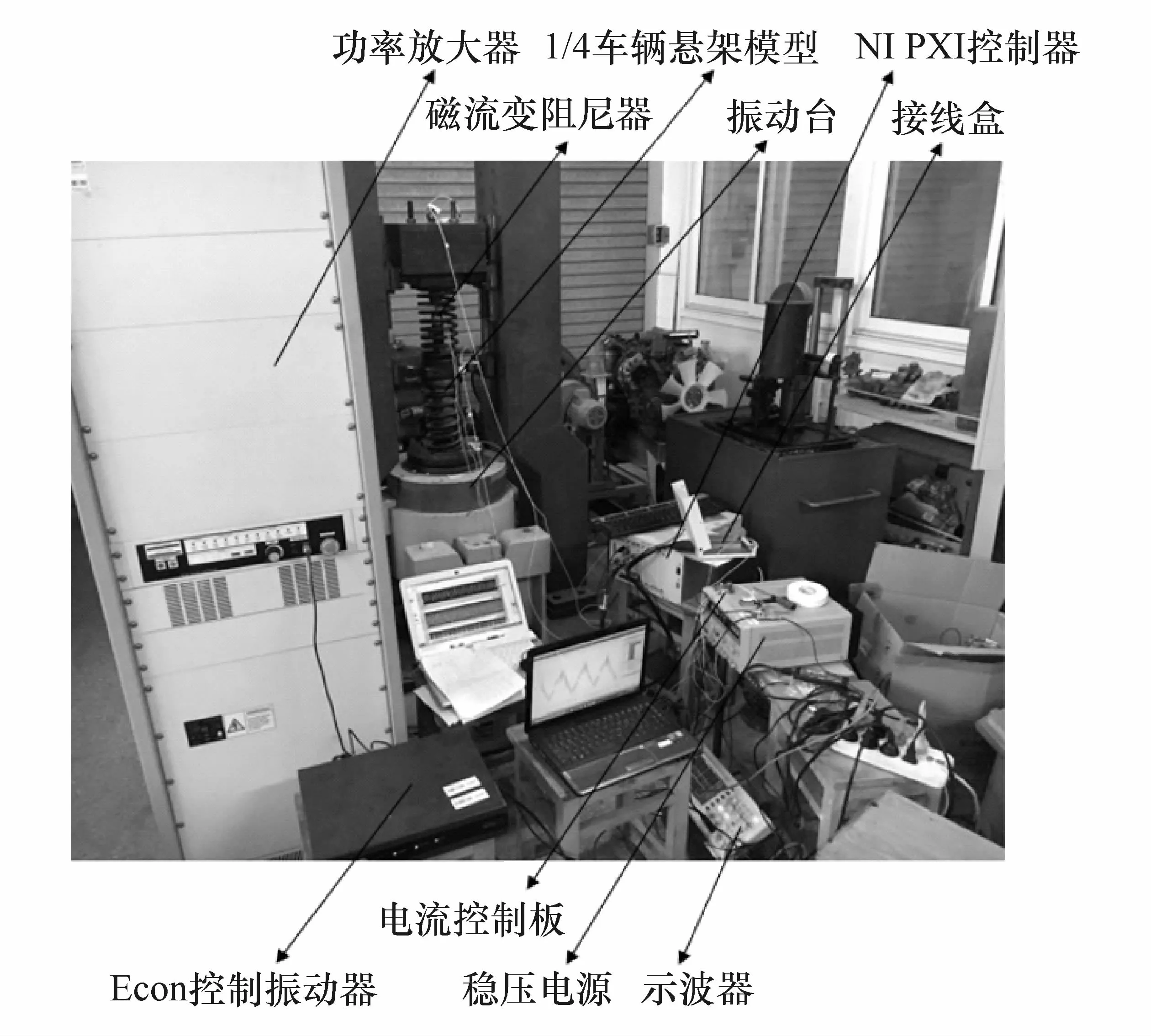
图4 2DOF悬架时滞控制实验平台
首先利用振动台的作用模拟悬架系统路面激励,然后利用加速度传感器采集簧载质量加速度、非簧载质量加速度和振动台基础加速度激励,并将其输入到NI控制器中;之后控制器根据设计好的控制算法计算出期望的控制电压值,并通过NI SCB-68A将电压信号输出;最后,通过电流控制板将控制电压转换为相应的电流,输入到磁流变阻尼器中,达到调节磁流变阻尼器阻尼力的作用。与此同时,将计算机与NI PXI控制器通过网线连接,并应用Labview将加速度传感器采集的簧载质量加速度信号存储在计算机中,用来评价控制算法的控制效果。
选取τmax=70,80 ms对应的矩阵增益K进行控制实验测试,得到簧载加速度的时间历程曲线的实验结果,见图5和图6。
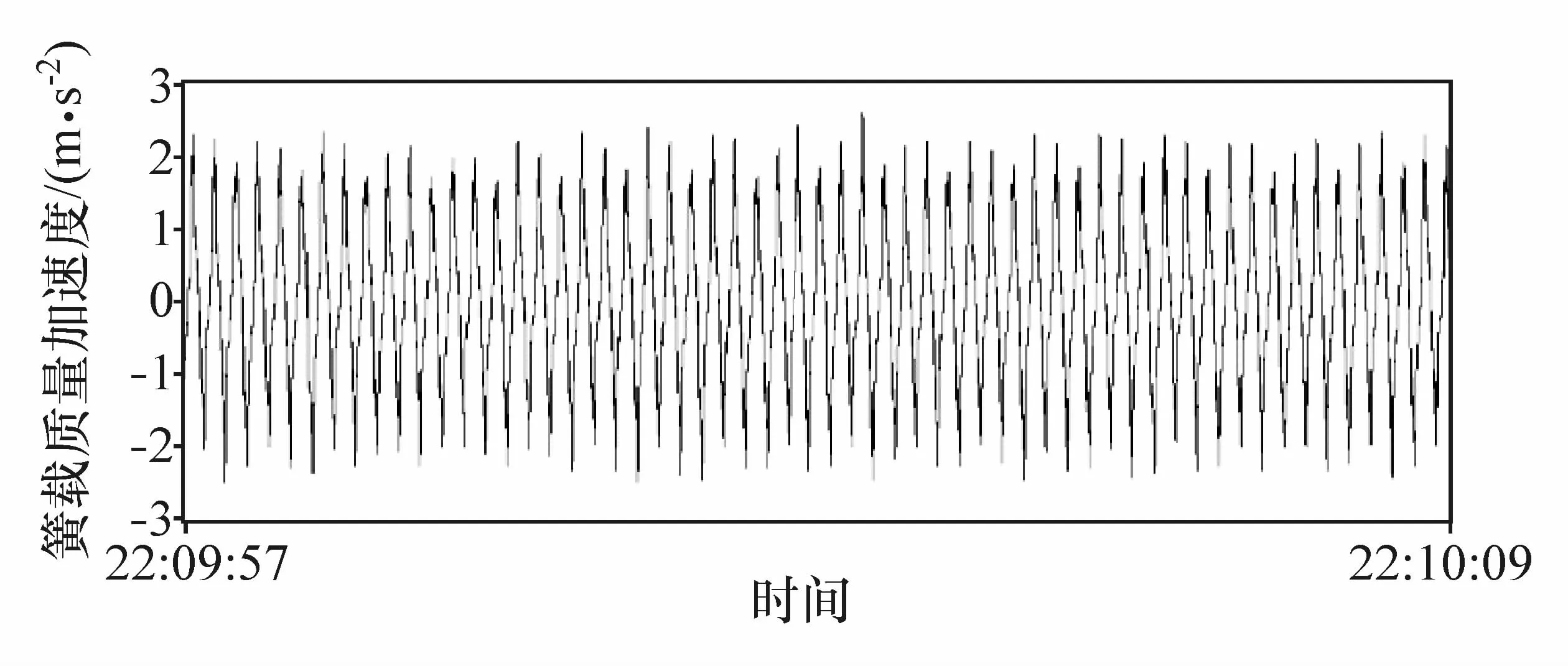
图5 τmax=70 ms时簧载质量加速度实验结果
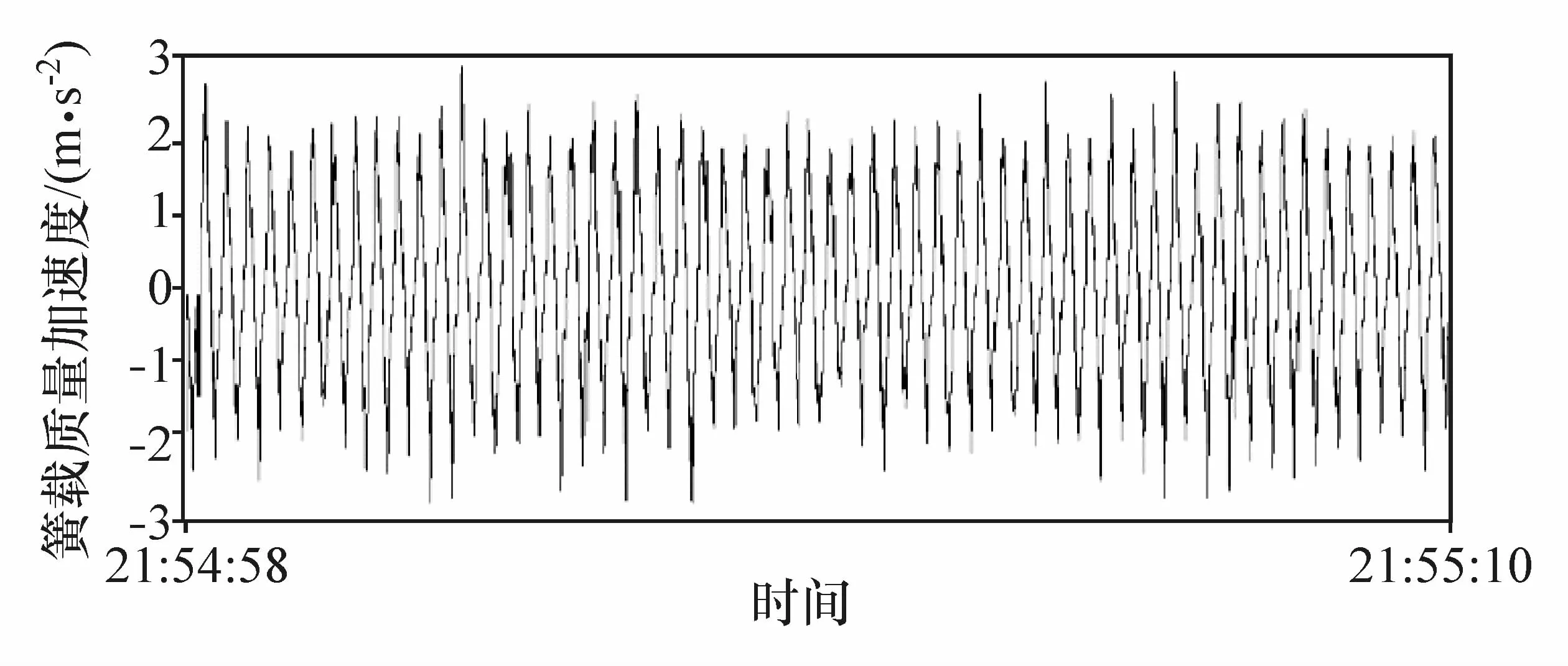
图6 τmax=80 ms时簧载质量加速度实验结果
将图5和图6与图2和3进行对比,发现实验结果和仿真结果吻合得较好。对实验结果进行处理,得到τmax为70和80 ms时,簧载质量加速度均方根值分别为1.223 1和1.263 5 m/s2。与上节的仿真结果 1.337 0和 1.338 8 m/s2相比,误差分别为8.52%和5.62%。产生误差的原因主要是由于磁流变阻尼器的非线性特性所致,磁流变阻尼器的阻尼力具有强非线性,不能精确表示出反馈力的大小,并且阻尼力存在上限,会出现达不到控制增益所要求的控制力的情况;另外,信号干扰、环境影响和设备因素等也会产生误差。但簧载加速度的均方根误差在10%以内,满足工程要求。
以上理论和实验结果对比,验证了时滞H∞控制算法的有效性。现利用该算法进一步分析不同增益下时滞与簧载加速度均方根值关系。
图7展示了在不同控制增益下,时滞与簧载加速度的关系曲线。由图7可见,簧载加速度的大小和τmax、d(t)的选择有关。对于同一条曲线,时滞量距离所对应的τmax越近,控制效果越好,即簧载质量加速度越小。因此最大稳定时滞量τmax的选取应尽量接近系统固有时滞。
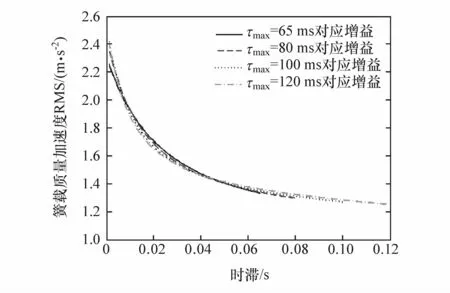
图7 不同增益下时滞与簧载加速度均方根值关系曲线
4 结论
本文对2自由度悬架系统的时滞鲁棒H∞控制问题进行了研究分析,并进行了实验验证,主要结论如下。
(1)通过采用 Lyapunov-Krasovskii泛函和自由权矩阵法,设计满足闭环系统稳定性和鲁棒性的时滞控制策略,并推导出控制策略满足的条件。
(2)由于上述条件为非线性矩阵不等式,不易求解。为便于求解增益矩阵,根据参数调节法,将上述条件转化成等价的线性矩阵不等式。
(3)通过理论与实验相结合的方法研究时滞对汽车悬架系统振动特性的影响。验证了H∞控制策略的减振效果,实验结果和仿真结果均表明,主动控制悬架的振动加速度响应均方根值与被动悬架相比明显降低,乘坐舒适性得到明显改善。研究还发现时滞量距离所取的τmax越近,控制效果越好。
猜你喜欢
心理学报(2022年10期)2022-10-12
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
北京航空航天大学学报(2021年6期)2021-07-20
时代汽车(2021年1期)2021-03-03
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
上海师范大学学报·自然科学版(2018年3期)2018-05-14
布达拉(2018年5期)2018-05-14
