
基于改进跟踪微分器的进气压力控制技术研究
2020-03-31 11:43白克强但志宏刘知贵
自动化仪表 2020年3期
刘 磊,白克强,张 松,但志宏,刘知贵,3
(1.西南科技大学信息工程学院,四川 绵阳 621000; 2.中国航发四川燃气涡轮研究院,四川 绵阳 621703;3.西南科技大学计算机科学与技术学院,四川 绵阳 621000)
0 引言
航空发动机在使用之前都需要在高空台上进行飞行性能测试,只有达到了飞行指标,才会被允许安装在飞机上进行试飞。高空台需要模拟高空飞行的环境。其中,进气压力控制系统主要是模拟高空飞行环境中的压力[1]。进气压力控制系统的被控对象存在大时滞特性。这会影响整个控制过程的响应能力,使得被控对象受到的干扰不能及时在反馈信号中体现出来,导致进气压力出现较大的超调量,影响控制系统稳定性和调节时间。在进气压力控制过程中,反馈信号经常会受到不同程度的噪声干扰。这些干扰会导致系统控制精度的下降。因此,针对进气压力控制系统存在的问题,需研究一种同时具有相位补偿与滤波能力的控制方法。
对于时滞性系统出现的相位滞后问题,最早使用的方法是在产生滞后的环节中引入超前校正网络(advanced correction network,ACN),补偿输出信号的相位延迟,来解决时滞系统的控制问题[2]。其优势是结构简单,便于工程实现;但是会降低系统的抗干扰能力,导致难以处理带有量测噪声的输入信号。跟踪微分器(tracking differentiator,TD)[3]可以从带有随机噪声的输入信号中提取微分信号,同时具有一定的抗干扰能力。近年来,跟踪微分器在目标估计[4]和控制器设计[5]方面都有广泛的应用,提升了控制系统的抗干扰能力。武利强等[6]在研究跟踪微分器的参数选取时,发现使用合理的跟踪微分器参数可以获得较好的跟踪信号,但同时会带来一定的相位滞后问题。韩京清等[7]提出了基于跟踪微分器的相位超前补偿设计方法,通过将跟踪信号与微分信号进行超前组合,可以实现对输入信号的相位超前校正。在这基础上,明超等[8]使用串联型跟踪微分器,不仅实现了跟踪信号的相位超前校正,并且具有一定抑制输出信号颤振的能力。但这样的相位补偿器在处理带有噪声的输入信号时,跟踪微分器得到的微分信号没有经过特定的滤波环节处理,选用该微分信号进行超前预报,仍然会使输出信号出现颤振现象。Fal函数是一个基于经验知识“大误差,小增益;小误差,大增益”,得到的非线性函数[9]。这使得Fal函数本身拥有不错的滤波特性,所以Fal函数滤波器可以抑制噪声的干扰,同时可以较快跟踪输入信号[10]。
本文分析了进气压力控制系统反馈信号的延迟和颤振问题。利用Fal函数的非线性滤波特性,将Fal函数滤波器与跟踪微分器相结合,提出一种改进跟踪微分器实现对信号的相位补偿。进气压力控制系统仿真试验表明,该方法提升了进气压力的控制精度,保证了高空模拟试验的可靠性。
1 进气压力控制系统简介
高空台的进气压力控制系统主要通过控制液压伺服来调节流量阀门的开度,调控进气口的气体流量来控制容腔里的压力变化,最终保证容腔里的压力达到模拟要求。进气压力控制框图如图1所示。
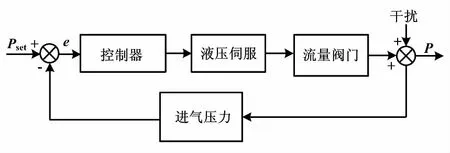
图1 进气压力控制框图Fig.1 Intake pressure control block diagram
在上述控制系统中,被控对象具有较强的非线性特征,并且从控制流量阀门到调节压力的过程存在较大的时滞特性。进气压力与阀门流量之间的关系如下:
(1)
式中:Win为进气口流量;Wout为排气口流量;P为容腔压力;T为容腔温度;V为容腔体积;其余参数为容腔动力学常数。
从这个容腔模型可以看出,压力的变化反馈到控制器会存在一定的时延,进而导致反馈信号不能及时反映被控量的变化,影响控制系统稳定性。
2 跟踪微分器与相位补偿器
2.1 跟踪微分器
跟踪微分器的离散表达式为:
(2)
式中:v为输入信号;x1为v的跟踪信号;x2为x1的近似微分;r为速度因子;h为积分步长;h0为滤波因子;fhan(x1,x2,r,h)为最速控制综合函数。
其调用方式如下:
(3)
跟踪微分器能够有效跟踪输入信号,并得到其近似微分信号。在输入信号带有量测噪声的情况下,增大参数h0可以提升跟踪微分器的滤波特性,但是会相应增加跟踪信号的相位延迟。
2.2 相位补偿器
跟踪微分器能够获得输入信号的近似微分,因此可以通过将微分信号向前预报的方式,实现对输出信号的相位补偿,即基于跟踪微分器的相位补偿器(phase advancer,PA)。PA算法的工作流程为:首先将给定的输入信号v(t)通过跟踪微分器,得到跟踪信号x1(t)和微分信号x2(t);然后将微分信号x2(t)向前预报λ时间,就可以得到相位超前后的输出信号x(t)。PA原理如图2所示。
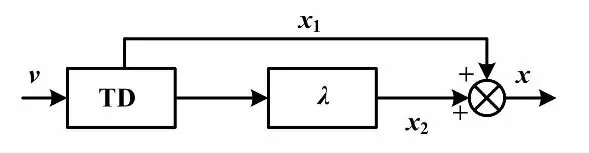
图2 PA原理图Fig.2 Principle diagram of PA
该算法公式如下:
(4)
式中:h为积分步长;r为速度因子;h1为滤波因子;λ为预报时间参数;γ为相位补偿器参数。
利用PA不但可以完成对输入信号的有效跟踪,并且还能实现信号的相位超前。但在输入信号带有量测噪声的时候,输入信号经过跟踪微分器后,得到的微分信号x2(t)会出现较大的震颤。进而导致使用微分信号x2(t)向前预报时间后,产生的跟踪信号x(t)会受到较大影响。
对此,有学者在PA的结构上,把跟踪微分器获得的微分信号x2再输入到下一个跟踪微分器,获得新的微分信号。这样就可以减少微分信号的振荡。最后将新的微分信号向前预报λ时间,进而获得具有相位超前的输入信号。改进型相位提前器(modified phase advancer,MPA)的算法公式如下:
(5)
MPA算法在实现相位补偿的同时也具有一定消除信号颤振的能力,但是该算法运用了两个最速控制综合函数来处理信号的跟踪,缺少实质的滤波环节,导致微分信号仍存在一定的颤振现象。两个跟踪微分器还会涉及到多个开关切换函数,使得该算法稍显复杂。
3 改进的跟踪微分器设计
3.1 Fal函数滤波器
Fal函数滤波器的函数表达式为:
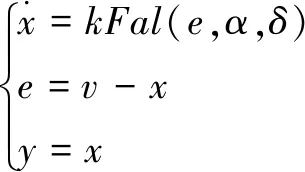
(6)
其中,Fal(e,α,δ)为:
(7)
式中:v为输入信号;k为比例系数;α为0~1常数;δ为滤波常数;y为输出信号。
3.2 改进的跟踪微分器
为了解决在有量测噪声的情况下,MPA的输出信号的颤振问题,本文提出了一种结合Fal函数滤波器的相位超前补偿器。该Fal+PA算法的实现方式为:在PA算法结构的基础上,先将输入信号经过跟踪微分器,获得微分信号x2(t)和原信号x1(t),这时的微分信号会存在一定的颤振。因此,需要通过一个滤波器来减少颤振,即在跟踪微分器后面加一个Fal函数滤波器,对微分信号实现快速跟踪及滤波得到新的微分信号x3(t)。最后将新的微分信号x3(t)向前预报λ时间,进而获得较为平滑的跟踪信号。Fal+PA的工作原理如图3所示。
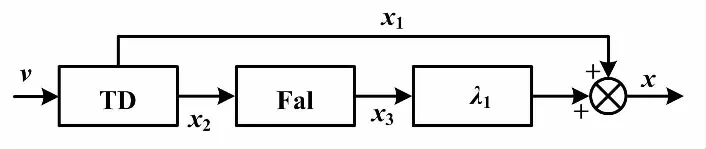
图3 Fal+PA原理图Fig.3 Principle diagram of Fal+PA
Fal+PA算法的离散形式表示如下:
(8)
在Fal+PA的滤波算法中,参数h可以改变跟踪微分器的滤波效果;可调参数r决定跟踪速度;k为比例系数;δ为可以调整Fal函数滤波效果的常数;α为0~1之间的常数;λ1和γ可对输出信号x(t)的相位和幅值作适当调节。
4 相位补偿器性能分析与测试
4.1 频域特性分析
分析ACN、PA、MPA和Fal+PA四种相位补偿器的开环频域特性,进而研究其对输入信号的跟踪速度与响应速率,采用基于扫频测试的频域特性分析法[11]得到各个补偿器的频域特性。频域特性比较曲线如图4所示。
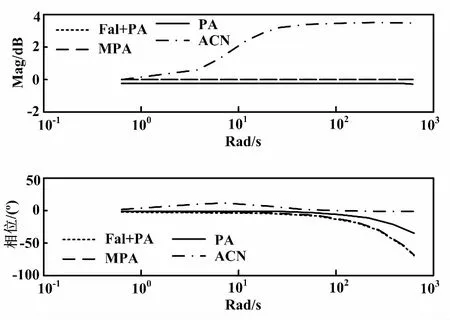
图4 频域特性比较曲线Fig.4 Comparison curves of frequency domain characteristics
通过分析相位补偿器的幅频特性可以发现,ACN的响应速度较快,但跟踪精度较差,存在较大的幅值误差。MPA和FAl+PA两种相位补偿器的幅频特性类似,都具有较快的跟踪速度与精度,与PA相比,提升了相位补偿器抑制噪声的能力。
4.2 性能测试
通过以下两个仿真试验,验证本文提出的Fal+PA在输入信号带有噪声情况下的滤波及相位超前能力。为了突出Fal+PA的优势,这里将其与ACN、PA、MPA三种相位补偿器进行仿真对比。
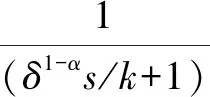
ACN的传递函数为:
(9)
例1输入信号为方波信号,带有0.01n(t)的高斯白噪声。仿真步长为0.001 s。
四种相位补偿器的参数选择如表1所示。
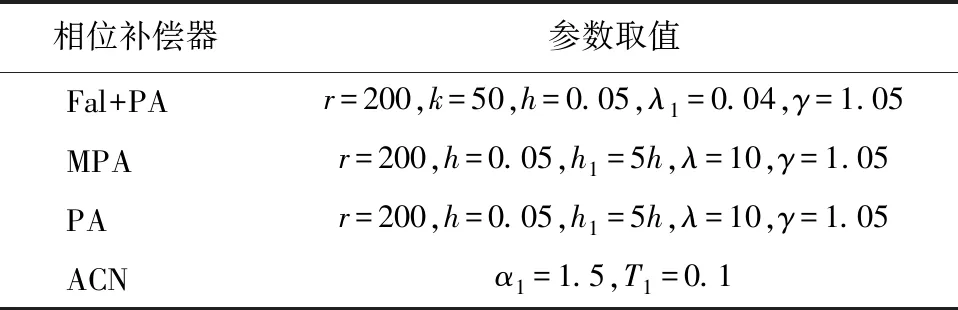
表1 相位超前补偿器的参数取值Tab.1 Parameters of phase advancer
跟踪曲线如图5和图6所示。图中:v为目标曲线。
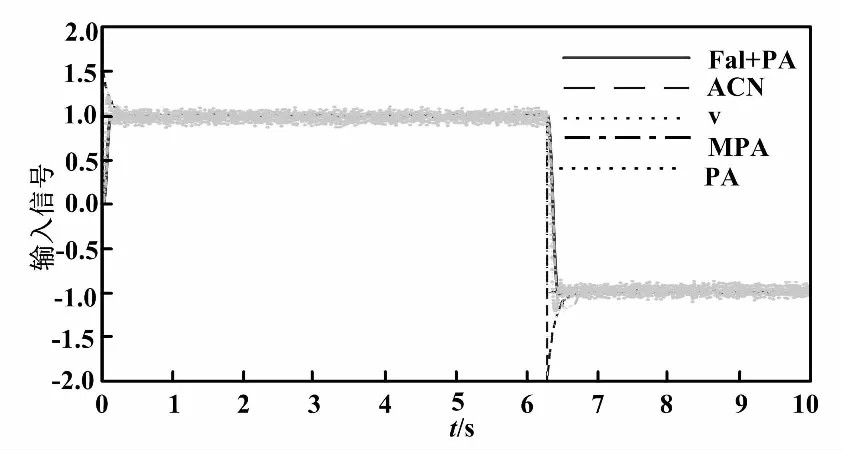
图5 方波信号的跟踪曲线Fig.5 Tracking curve of square wave signal
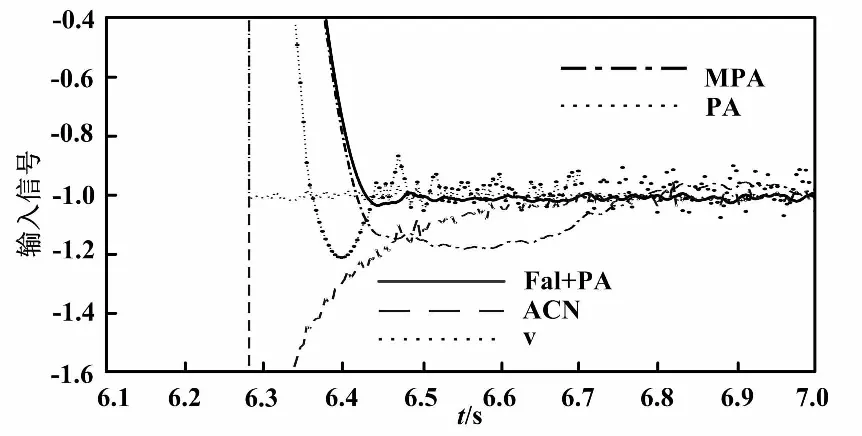
图6 方波信号的跟踪曲线(局部放大)Fig.6 Tracking curve of square wave signal (enlarged)
从图5和图6中可以看出,四种方法都有一定的信号跟踪能力。Fal+PA具有更小的超调,其跟踪速度也不错,并且滤波特性最好;ACN虽然快速性很好,但是其超调较大;PA虽然有较好的快速性,但稳定性较差,跟踪信号产生颤震;MPA的有一定的滤波特性,但是与Fal+PA相比具有更大的超调。
例2输入信号为正弦波信号4sin(t),其受到0.05n(t)的高斯白噪声污染,仿真参数仍采用表1 的值。其仿真结果如图7和图8所示,图9为跟踪误差曲线。
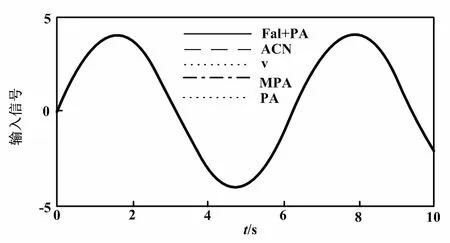
图7 正弦信号的跟踪曲线Fig.7 Tracking curve of sinusoidal signal
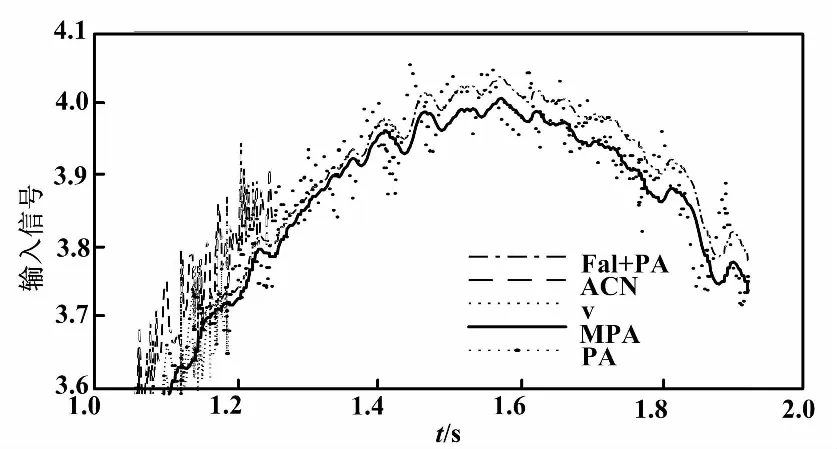
图8 正弦信号的跟踪曲线(局部放大)Fig.8 Tracking curve of sinusoidal signal (enlarged)

图9 正弦信号跟踪误差Fig.9 Tracking error of sinusoidal signal
从图9可以发现,四种方法同样都具有跟踪输入信号的能力。ACN可以实现信号的相位超前,但跟踪信号振荡剧烈,缺乏滤除噪声的能力。PA可以实现跟踪信号的相位超前,但仍然存在跟踪信号的颤振现象。Fal+PA和MPA的方法都能在抑制噪声的同时,使跟踪信号具有相位超前的能力,但Fal+PA的跟踪误差更小、滤波特性更好。
为了进一步判断输出信号的质量[12],引入噪声因子R和超前因子Q:
(10)

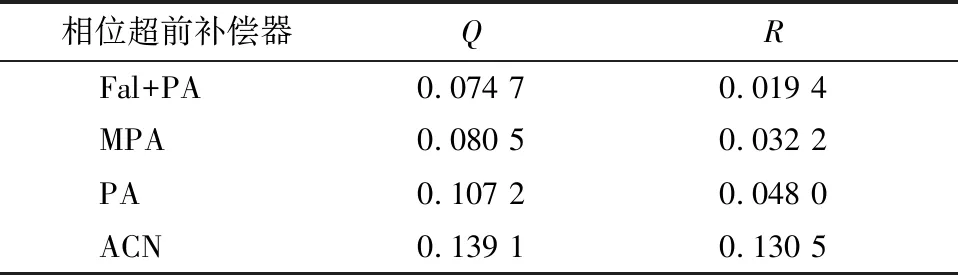
表2 性能指标对比Tab.2 Performance index comparison
从表2中可以发现,相比MPA、ACN和PA的方法,Fal+PA方法更具滤波优势,Fal+PA与MPA的超前因子相差不大,并且可以结合工程需要,适当调节预报因子实现相位补偿。综合对比相位超前及滤波性能,在处理带噪声的输入信号时,PA+Fal较 MPA、ACN和PA更具有滤波优势。
5 仿真结果与分析
以传统进气压力控制系统为基础,在其反馈回路上加入改进的跟踪微分器,对反馈信号的相位进行补偿,进而提升控制系统的响应速度。基于改进跟踪微分器的进气压力控制框图如图10所示。

图10 基于改进跟踪微分器的进气压力控制框图Fig.10 Intake pressure control block diagram based on improved tracking differentiator
①30 s时,压力设定值在10 s内从75 kPa降低至65 kPa;60 s时,压力设定值在10 s内从65 kPa增加至75 kPa。②80 s时,发动机的流量扰动在5 s内从60 kPa上升至140 kPa;100 s时,发动机的流量扰动在5 s内从140 kPa降低至60 kPa。
反馈信号受到强度为0.01的[-1,1]的随机白噪声。进气压力控制曲线、流量阀开度曲线如图11、图12所示。
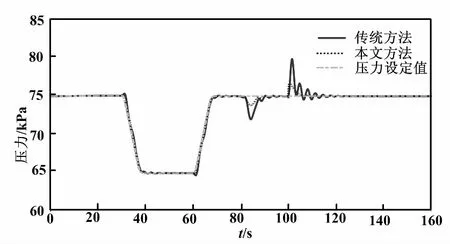
图11 进气压力控制曲线Fig.11 Intake pressure control curves
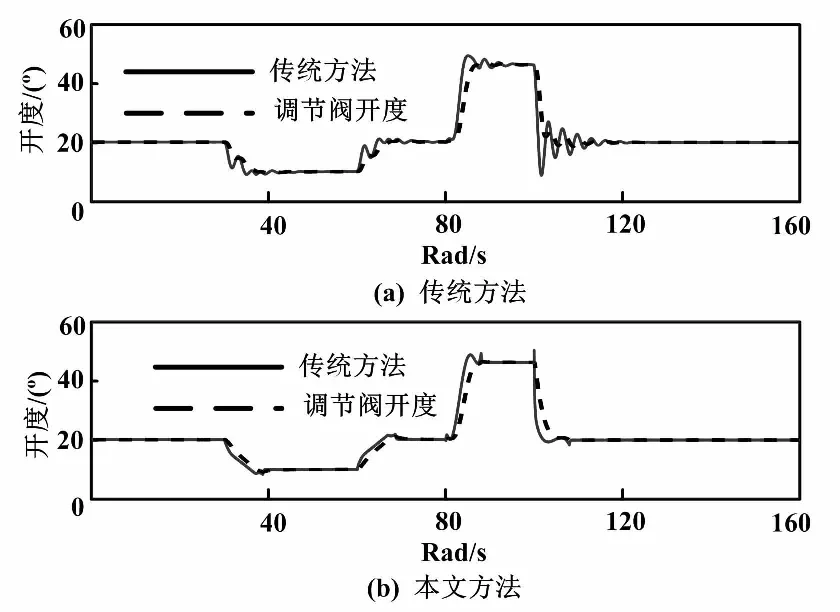
图12 流量阀开度曲线Fig.12 Flow valve opening curves
从图11和图12中可看出,加入了预报补偿环节之后,控制系统的抗干扰能力明显加强,进气压力的超调量减小、响应速度变快。在有量测噪声的情况下,控制信号也相对平滑,降低了控制系统对噪声的敏感程度。
6 结论
针对进气压力控制系统中反馈信号存在相位延迟的问题,本文在分析了传统相位补偿方法的基础上,结合Fal函数滤波器与跟踪微分器的优点,提出了一种基于改进的跟踪微分器相位补偿方法。充分运用Fal函数滤波器的滤波特性,使输出信号在实现相位补偿的同时,也具有一定抑制噪声干扰的能力。该算法结构相对简单,易于工程实现。通过仿真试验表明了Fal+PA相比传统的相位补偿方法具有一定优势。将其应用在进气压力控制系统中,结果证实了该相位补偿方法,可以提升控制系统的抗扰能力,保证高空模拟环境的真实性。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
导弹与航天运载技术(2022年2期)2022-05-09
黑龙江大学自然科学学报(2022年1期)2022-03-29
湖南电力(2021年4期)2021-11-05
昆钢科技(2020年6期)2020-03-29
电子制作(2018年16期)2018-09-26
电子制作(2017年2期)2017-05-17
北京航空航天大学学报(2017年10期)2017-04-20
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
