
基于自适应调度间隔的雷达事件调度算法
2020-03-28 11:20:02谭贤四曲智国
雷达科学与技术 2020年1期
谭贤四 曲智国 王 红
(1. 空军预警学院, 湖北武汉 430019; 2. 95174部队, 湖北武汉 430000)
0 引言
相控阵雷达具有波束捷变、天线波束快速扫描、空间功率合成与多波束形成等能力[1],能够完成多目标跟踪、多区域搜索等复杂任务,因此在现代战争中得到广泛运用。但同时大型相控阵雷达跟踪目标数量多、监视区域大,不同任务存在相互冲突的可能,因此必须选择灵活有效的调度策略发挥相控阵雷达性能、完成作战任务[2]。
目前相控阵雷达调度策略主要有固定模板、多模板、部分模板和自适应调度策略,其中模板类策略适用环境单一,调度效率低下,难以适应现代战争需要;自适应调度策略由于具有资源利用率高、环境适应力强、可开发性大等优点,在相控阵雷达事件调度问题中得到广泛应用[3]。
相控阵雷达事件调度问题的核心内容在于调度算法设计,赵宇等[4]在文献[5]基础上提出基于二次规划的调度算法,孙铭才等[6]提出基于改进时间指针的调度算法。近年来,随着智能优化算法(如遗传算法)的发展与计算机硬件性能的提高,不少学者提出利用智能优化算法对雷达事件进行调度,Charlish等[7]利用连续双拍卖算法,张浩为等[8]利用混合遗传-粒子群算法,Abdelaziz[9]利用禁忌搜索算法,有效提高算法的全局寻优能力与可开发性。
但在这些算法中,调度间隔通常都被设置为一定值,基于固定调度间隔的调度算法在调度过程中难以有效利用雷达资源,实现最佳调度效果;这是由于当调度间隔设置过大时无法满足系统对某些任务的频率要求;当调度间隔设置过小时会增加“时间碎片”形成可能性,降低时间资源利用率[10]。针对这个问题,本文提出基于自适应调度间隔的调度算法:设置一时间指针,调取该指针下所有可执行事件,依次计算这些事件该时刻收益并选取收益最高事件执行;递推该指针直至该调度间隔内无法执行任何事件;提前结束该调度间隔并将该间隔剩余资源“传递”至下一调度间隔;重复上述步骤直至调度结束。仿真实验表明,与基于固定调度间隔的调度算法相比,基于自适应调度间隔的调度算法能够有效减少“时间碎片”的形成,提高调度成功率与时间资源利用率。
1 事件调度基本问题
1.1 调度意义
雷达为稳定跟踪目标,必须定期/不定期对目标进行回访,每次回访将消耗一定量的雷达资源,以图1(a)为例。图中每一白色方块表征为一次雷达“事件”。
当雷达同时需要跟踪若干批目标时,不同事件彼此间存在相互冲突的可能,如图1(b) 所示,图中黑色方块与白色方块存在重叠,表明雷达在跟踪目标A的过程中将影响对目标B的跟踪,因此必须通过合理有效的调度手段对冲突事件进行调度(图1(c)),以充分利用雷达资源,发挥兵器效能。
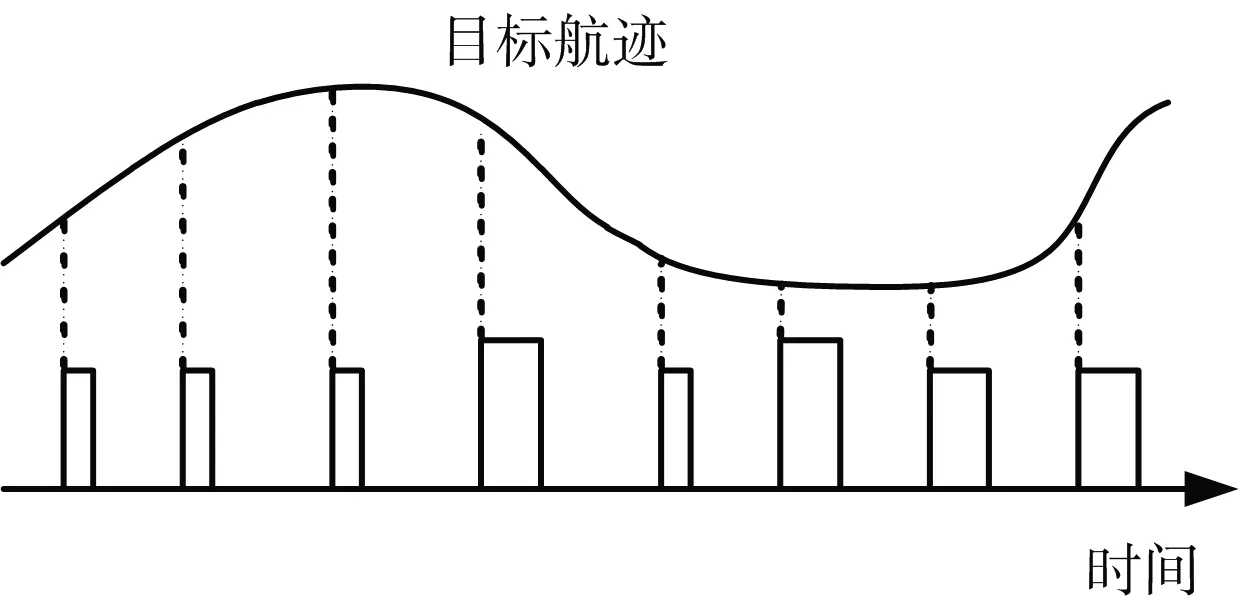
(a) 跟踪单批目标时

(b) 跟踪多批目标调度前
1.2 调度流程
当相控阵雷达在接受到事件请求后将事件请求序列送入雷达资源管理系统(Radar Resource Management,RRM)生成待调度序列,RRM提取下一调度间隔内所有事件请求并根据雷达硬件条件与战场环境需求等因素计算事件属性;计算完成后事件请求被送入调度模块进行调度并生成执行、延迟、删除序列,其中执行序列送入发射机执行,延迟序列送入下一调度将进行再调度,删除序列不予执行,其具体过程如图2所示。
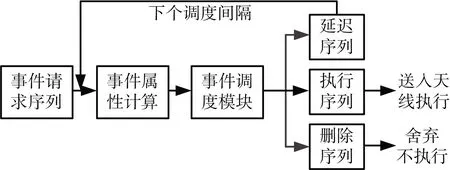
图2 调度流程示意图
1.3 事件请求模型
相控阵雷达事件请求模型应包括事件综合优先级、发射功率、驻留时长、时间窗大小、请求执行时刻等信息,可通过以下模型来描述:
TaskRequire={PS,Pw,Tτ,te,TW}
(1)
式中:PS为事件综合优先级,由目标类型、速度、高度等信息与雷达资源利用情况共同决定;Pw为发射功率,由雷达能量资源约束决定;te为最佳执行时刻,由雷达上次照射执行时刻与跟踪间隔共同决定;TW为时间窗大小[11],由目标运动状态与雷达波门大小共同决定;Tτ表示事件驻留时长,可细分为发射脉冲时长、等待阶段时长、接受脉冲时长,对于采用非抢占式EDF算法来说,事件一旦开始无法停止,即Tτ内时间无法执行其他事件,对于采用交错脉冲技术雷达来说,Tτ内事件等待阶段可以执行其他事件。
1.4 调度数学模型
相控阵雷达事件调度问题实质上可归为调度中作业车间调度问题(JSP job scheduling problem)。需要考虑多参数优化与多条件约束。
1) 约束条件
相控阵雷达没完成一次事件,都将消耗一定量的雷达资源,而雷达系统所拥有的资源是有限的,因此必须通过限制条件对雷达资源加以约束;雷达资源主要体现为时间资源、能力资源、硬件条件资源和计算机资源四种。
4种资源约束中由于时间轴固定,因此时间资源约束不能调节,属于“刚性约束”;能量资源约束可以通过加大输入电流、更换扇热设备等方法调节,属于“弹性约束”;后两种约束条件难以用数学模型表述。因此本文重点考虑时间资源约束。
将4种约束条件分别记为h1,h2,h3,h4。
2) 评价指标
为评价调度算法的优劣,本文选取实现价值率(HVR hit value rate)与时间资源利用率(TUR time utilization rate)作为评价指标[12],其中HVR与TUR计算式分别为
(2)
式中,Ne为调度成功事件数目,Nt为参与调度事件总数。
(3)

根据约束条件与目标函数可得相控阵雷达事件调度问题数学模型为
(4)
2 基于自适应调度间隔的调度算法
2.1 调度间隔影响
由上文可知,事件调度模块中调度算法仅对本间隔内待调度事件或是上一间隔内延迟事件进行调度,因此调度间隔选取对算法性能有着重要影响,它决定了雷达控制回路子程序执行频率,也决定了支持该间隔内工作方式处理能力的极限。显然调度间隔不能选取太长,过长的调度间隔无法满足系统回路相应时间要求;由文献[13]可知,调度间隔时长最长可等于系统中最短的伺服回路闭合时间的1/4,即
(5)
式中,TSI为调度间隔时长,Thmin为回路最小相应时间。
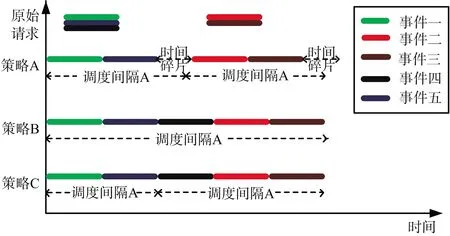
图3 调度效果示意图
但调度间隔也不能过短,过短的调度间隔会增加“时间碎片”形成可能性,降低时间资源利用率。以图3为例,图中将时间段[0,100 ms]划分为两个调度间隔,其中第一个间隔内有3批待调度事件,第二个间隔内有2批待调度事件,每批事件驻留时长均为20 ms;利用传统基于固定间隔的调度算法进行调度,即将每个调度间隔时长设置为50 ms(策略A),则第一个调度间隔内可执行2批事件,剩余10 ms时间资源无法执行第三批事件,因此事件3被延迟到下一调度间隔执行,但下一间隔内依然只能执行2批事件,再次形成10 ms“时间碎片”;可见,基于固定间隔的调度算法难以充分利用时间资源,调度性能较为低下。此时若将时间段[0,100 ms]仅划分为一个调度间隔(策略B),则5批事件都能得到调度,SSR与TUR均得到显著提高,但此时将面临超出系统最短伺服回路闭合时间风险。利用基于自适应调度间隔的调度算法将时间段[0,100 ms]划分为40 ms和60 ms两个调度间隔(策略C),则5批事件都能得到调度,SSR和TUR与策略B均相同,同时超出系统最短伺服回路闭合时间风险大大降低。
2.2 算法步骤
由上文思路可知,基于自适应调度间隔的调度算法应根据该间隔内事件多少灵活调节调度间隔时长,当本间隔内剩余资源无法调度更多事件时应提前结束该间隔,将剩余资源延迟至下一调度间隔内,避免形成“时间碎片”,提高雷达资源利用率。其具体步骤如图4所示。
水资源管理水平得到提高。国家最严格水资源管理制度试点建设通过水利部中期评估。水资源论证纳入政府投资项目联合审批,规模以上地下水用户全部实现水量在线监测。推行再生水、淡化海水、生态水和地下水“三增一减”管理,年利用再生水1.4亿t、淡化海水3 000万t,中心城区年生态补水1.73亿m3,压采深层地下水1 200万m3。顺利通过国家节水型城市复查,完成水功能区跨界断面核定,全市所有水功能区纳入水质监测。全年用水总量控制在24亿m3以内,万元GDP用水量降至18 m3,万元工业增加值用水量降至8.3 m3,重要江河湖泊水功能区达标率提高到21%。
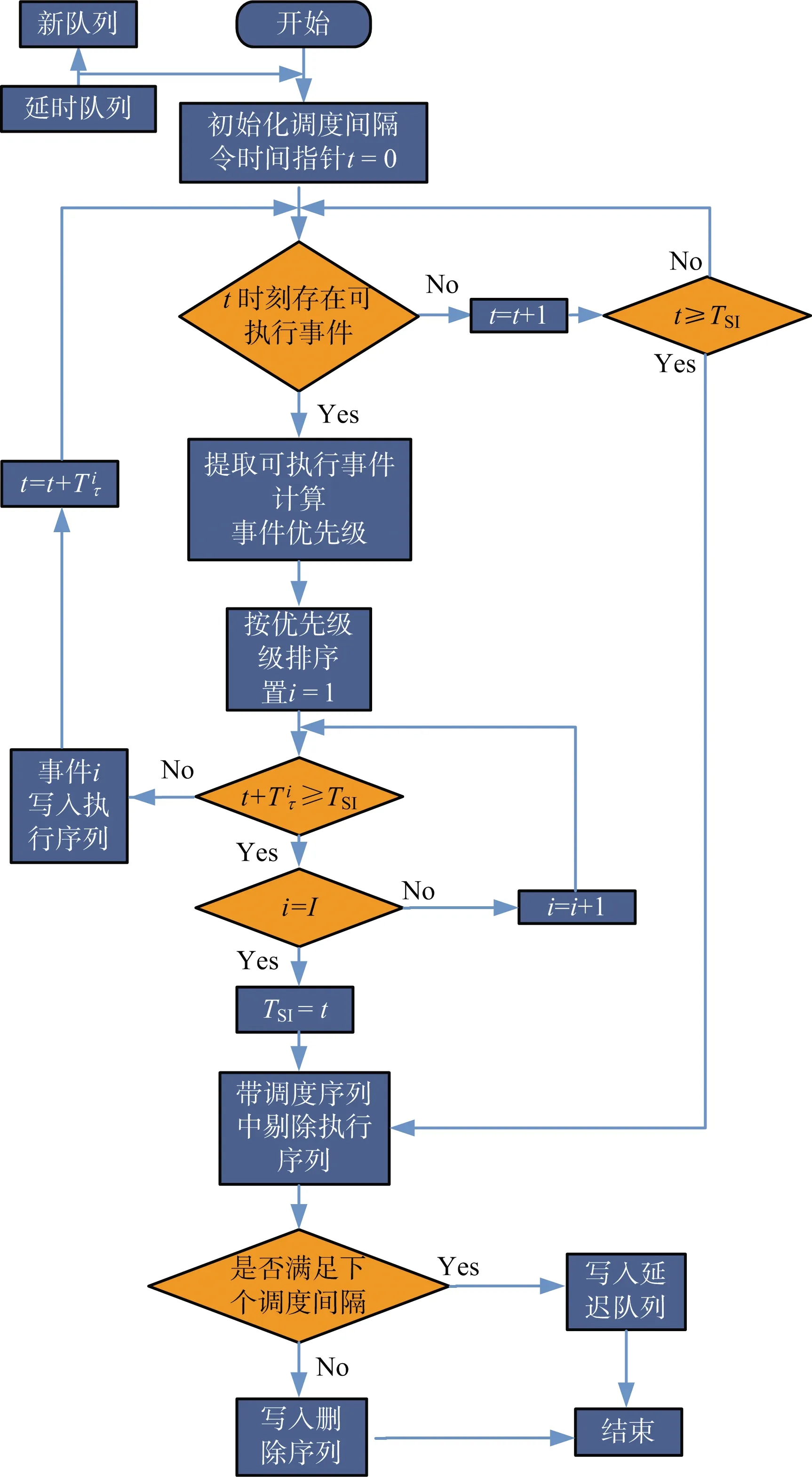
图4 调度流程
步骤1 初始化,调取事件请求序列与延迟序列。
步骤2 置时间指针t=0。
步骤3 提取满足t∈[te-Tw,te+Tw]所有事件,假设共计I批;若I=0,令t=t+1,进入步骤4;若I≠0,进入步骤5。
步骤4 判断t≥TSI,若为真,进入步骤8;反之回到步骤3。
步骤5 计算I批事件综合优先级,并按综合优先级对事件排序,置i=1。
步骤7 判断i=I,若为真,令当前调度间隔时长TSI=t;反之令i=i+1,返回步骤6。
步骤8 在待调度事件序列中剔除执行序列。
步骤9 判断剩余事件是否满足下个调度间隔,若是,写入延迟序列;反之写入删除序列。
步骤10 结束调度。
3 仿真分析
3.1 基于固定场景的调度效果比较
1) 事件请求生成
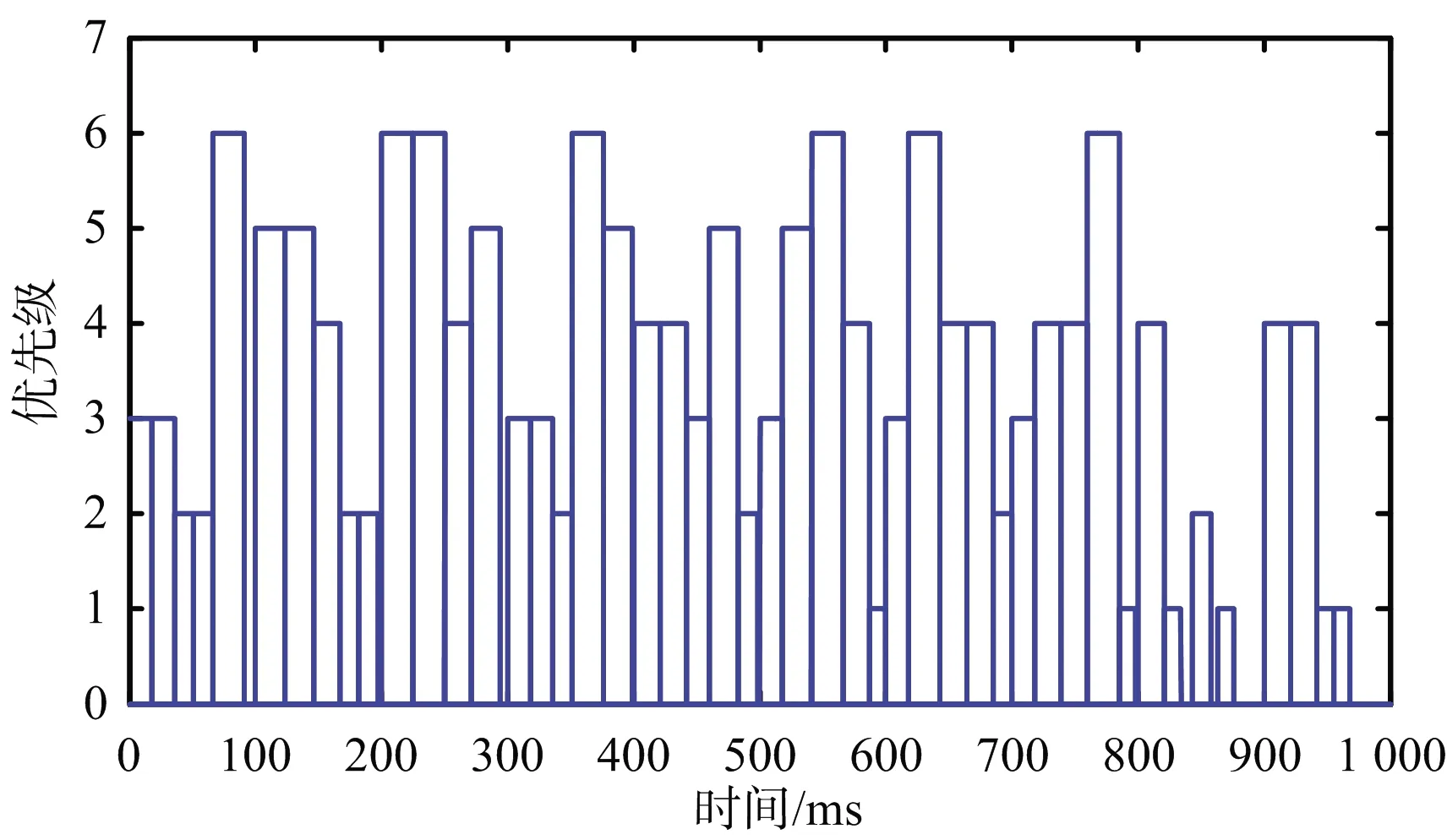
按照类别可将相控阵雷达事件分为低优先级搜索(LS)、高优先级搜索(HS)、普通跟踪(NT)、精度跟踪(PT)、高精度跟踪(HPT)和跟踪确认(TC)事件六种[14],6种事件综合优先级分别设置为1~6,不同类类别事件参数如表1所示,事件期望执行时间te~U(0 ms,1 000 ms),此处U(a,b)表示[a,b]范围内均匀分布,生成事件请求如图5所示。
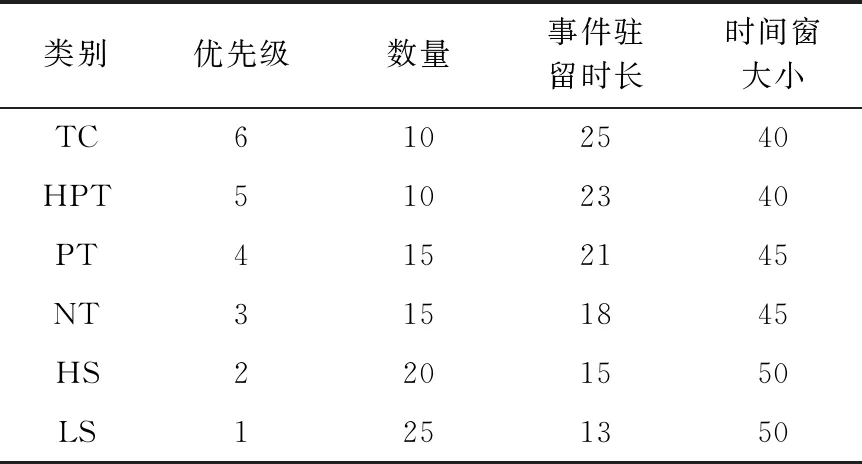
表1 事件请求参数
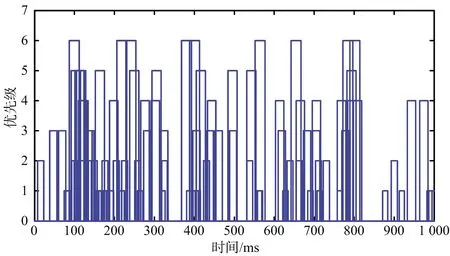
图5 事件请求
由图5可见,该想定场景下不同事件之间存在大量重复,时间利用率高达169%,因此必须利用某种调度策略对这些事件请求进行调度。
2) 调度结果比较

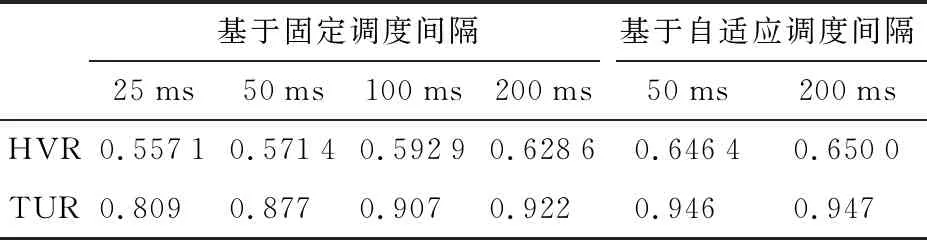
表2 调度性能比较

(a) 基于固定调度间隔(25 ms)
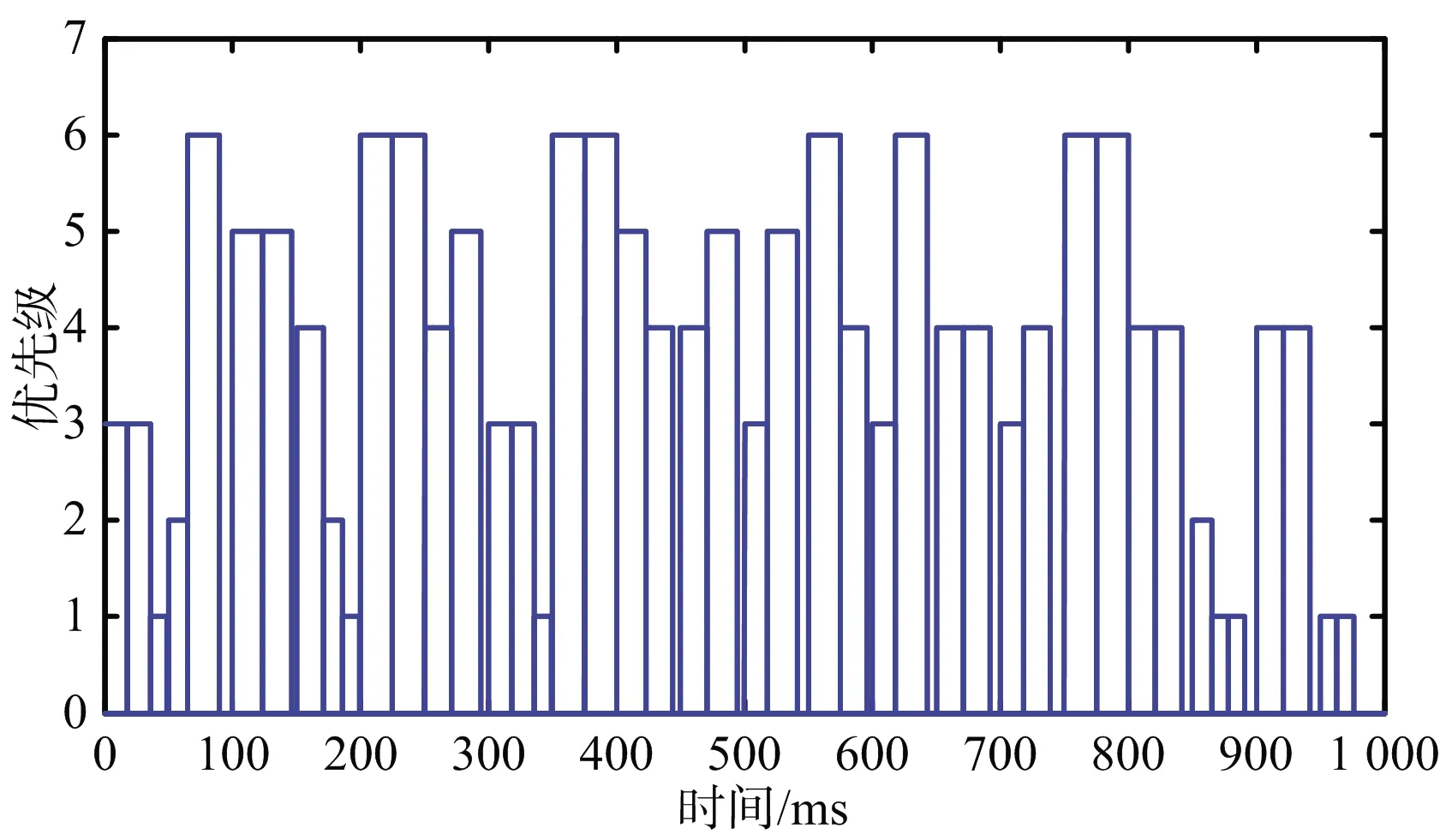
(b) 基于固定调度间隔(50 ms)
(c) 基于固定调度间隔(100 ms)

(d) 基于固定调度间隔(200 ms)
(e) 基于自适应调度间隔(50 ms)

(f) 基于自适应调度间隔(200 ms)图6 调度结果

基于自适应调度间隔的调度算法中各间隔时长如图7所示(以max(TSI)=50 ms为例),由图中可以看见在时间段[0,1 000 ms]内共存在有23个调度间隔,多于传统算法的20个,但每个间隔均小于最大时长max(TSI),杜绝超出系统最短伺服回路闭合时间的风险。

图7 调度间隔时长
3.2 基于蒙特卡洛仿真的调度效果比较

(a) HVR比较

(b) TUR比较图8 算法性能比较
由图8可以看出,随着参与调度事件数目增多,两种算法HVR与TUR分别呈下降与上升趋势。在基于固定调度间隔的调度算法中随着调度间隔时长TSI增加,HVR与TUR均有所提高,但均小于基于自适应调度间隔的调度算法。
4 结束语
针对相控阵雷达事件调度问题中传统算法将调度间隔设置为固定值,造成实现价值率不高、雷达资源利用率过低的问题,本文提出了一种自适应调度间隔的调度算法,该算法能够根据雷达资源利用情况自适应调节调度间隔大小,充分利用雷达资源,进而显著提升调度性能。
但本文仅就启发式算法中调度间隔如何自适应变化这个问题进行了讨论,在其他算法尤其是智能优化算法(例如遗传算法)中调度间隔如何自适应变化有待进一步研究。
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
煤气与热力(2021年3期)2021-06-09 06:16:16
化工管理(2021年7期)2021-05-13 00:45:20
数学小灵通(1-2年级)(2020年11期)2020-12-28 00:41:14
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:44
电子制作(2019年24期)2019-02-23 13:22:16
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
电子测试(2018年15期)2018-09-26 06:01:46
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
