
一种改进的基于矩的亚像素定位方法
2020-03-27 12:19李园园李勇
现代盐化工 2020年1期
关键词:图像处理
李园园 李勇


摘 要:基于不变矩的亚像素定位算法,由于引入了二阶矩,使得定位精度受到一定的影响。针对此,提出了一种新的定位方法,首先,通过sobel算子定位像素精度级别的边沿点,缩小定位范围,并且得到该点的梯度方向;其次,以该点作为边沿模型的中心,对于该模型区域内像素,通过双峰统计算法得到该边沿处目标与背景的灰度值;最后,根据几何模型与前两步所得参数,将参与运算的矩减到一个一阶矩,避免高阶矩的运算,从而提高定位精度。实验结果表明,该方法与其他几种基于矩的亚像素定位方法比较,具有更高的定位精度和更好的抗噪声干扰能力。
关键词:图像处理;亚像素;边沿定位;矩
基于图像处理的非接触式测量技术[1]现在应用得越来越广泛,随着测量精度要求的提高,基于像素级别的精度在很多场合已不能满足测量的需求,因此需要亚像素[2]精度级别图像测量与定位技术。目前,基于亚像素精度的算法主要有3类:基于不变矩[3]的方法、插值法[4]以及曲线拟合法[5]。插值法具有较好的重复性,并且算法计算开支较少,但是精度较低且抗噪声能力较差;擬合法精度较高且对噪声不敏感,但是计算模型复杂,算法开支较大,并且要求图像边沿满足特定的模型,在应用上有一定的局限性;基于不变矩的方法有较高精度,对噪声不敏感,算法开支适中,因此得到了较广泛的应用。本研究提出了一种新的方法,根据图像特征与几何模型得到两组重要参数,将参与运算的矩减到一个一阶矩。
1 常用基于矩的亚像素定位算法
常用的基于矩的亚像素定位算法如灰度矩(Gray Moment,GM),SGM,ZOM和OFMN等方法,有学者曾证明基于空间矩的方法优于灰度矩。本研究仅讨论这3种空间矩。
1.1 不变矩法
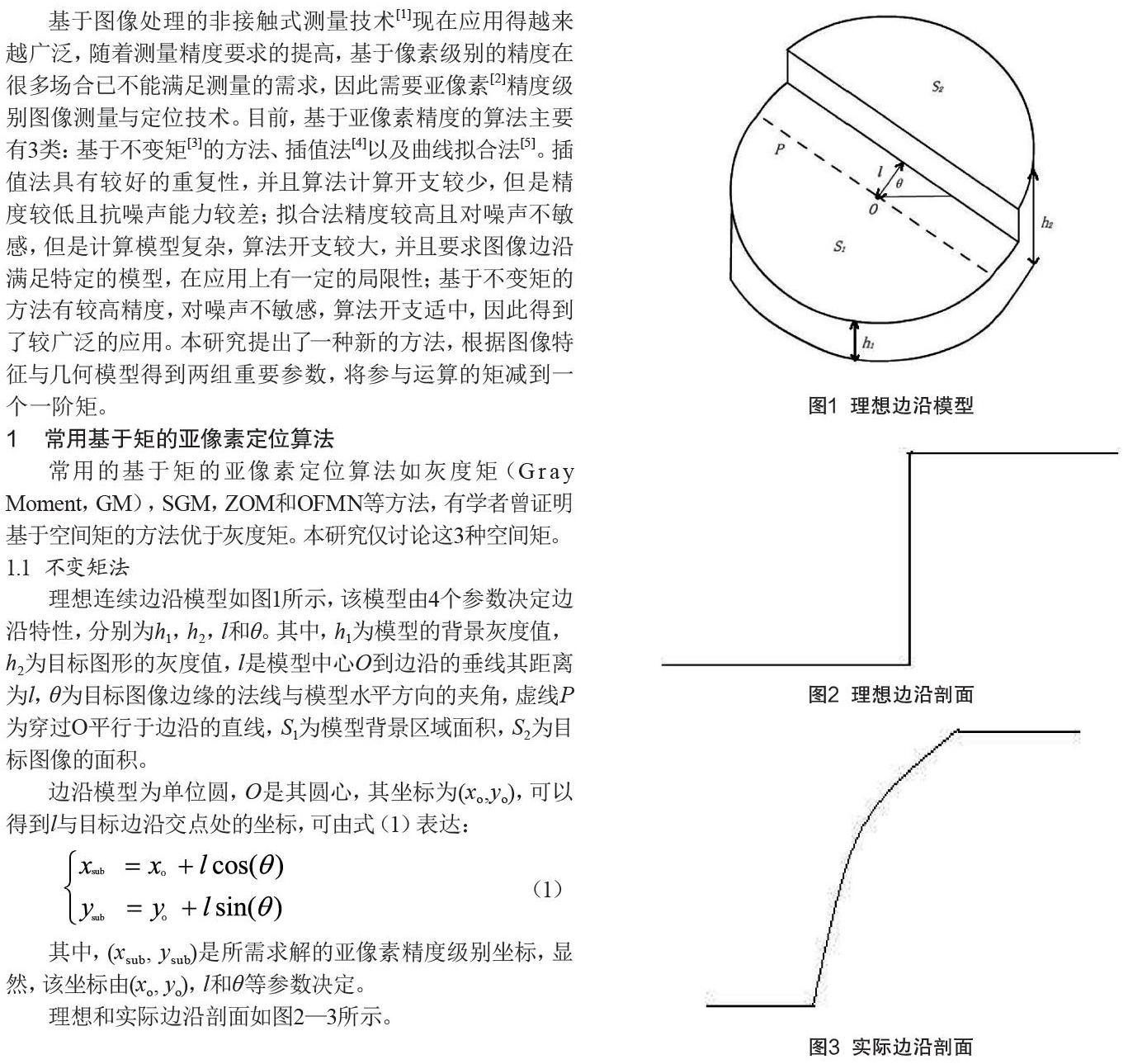
理想连续边沿模型如图1所示,该模型由4个参数决定边沿特性,分别为h1,h2,l和θ。其中,h1为模型的背景灰度值,h2为目标图形的灰度值,l是模型中心O到边沿的垂线其距离为l,θ为目标图像边缘的法线与模型水平方向的夹角,虚线P为穿过O平行于边沿的直线,S1为模型背景区域面积,S2为目标图像的面积。
由式(4)和(8)得到的值代入式(1),可得到亚像素的具体边沿。本研究实现流程:
(1)用Sobel 算子对输入图像I(x,y)进行卷积运算,得到偏微分图Gx(x,y),Gy(x,y)。
(2)按像素级精度边沿得到像素级边沿。
(3)按θ的获取得到像素级边沿点斜率。
(4)获取目标和背景灰度值。
(5)按l的解计算出亚像素坐标
2 实验与分析
为了检测本研究的定位效果,采用合成斜率倾角为0~180°的多组边沿位置精确的已知图像,每组图像中加入不同信噪比(Signal-to-Noise Ratio,SNR)的高斯白噪声。图7倾角为135°,SNR=30 dB时,图8为不同斜率边沿对l估算误差的方差的影响。按照同样的实验方法,得到了如表1—3所示的数据。
表1显示本研究对边沿图像目标和背景灰度值估计精度要明显高于其他3种方法,从上文分析可以看出本研究采用双峰统计的方法具有较好的去噪效果。表2可以看出,本研究对边沿梯度的估计精度略低于其他方法。表3可以看出,对参数l的估计精度要高于其他3种基于矩的方法,这些方法对l的计算皆用到了二阶矩,是引入误差的根源,而本研究只用到一个一阶矩,且不用考虑边沿模型旋转的问题,所以能得到较高的定位精度。
3 结语
亚像素定位技术在非接触的精密测量领域起着重要作用。本研究先分析了3种常用的基于空间矩的算法,指出了这些方法引入误差的原因;然后通过对图像边沿模型的几何分析得出:只要能精确估计出边沿曲线两侧的灰度值以及图像边沿的斜率,那么仅需要一个一阶矩就能得到曲线边沿的亚像素位置;最后通过实验分析验证,该方法相对于其他基于矩的算法具有更高的定位精度,并且具有更简单的算法模型。
[参考文献]
[1]许 琳,曹茂永,冯秀霞.图像测量技术及其在无损检测中的应用[J].电子测量技术,2009,38(1):137-141.
[2]孙少红,袁 华,张 彤.常用的亚像素边缘检测方法的对比研究[J].大众科技,2014,16(4):27-29.
[3]徐贵力,钟志伟,王 彪,等.具有几何和光照不变性的不变矩构建研究[J].航空学报,2013,34(7):1 698-1 705.
[4]HERMOSILL A T,BERMEJO E,BALAGU ER A,et al.Non–linear fourth-order image interpolation for subpixel edge detection and localization[J].Image and Vision Computing,2008,26(9):1 240-1 248.
[5]YE J,FU G K,POUDEL U P.High-accuracy edge detection withblurred edge model[J].Image and Vision Computing,2005,23(5):453-467.
Abstract:Based on the invariant moment subpixel localization algorithm, the positioning accuracy is affected by the introduction of the second moment. In order to solve this problem, a new positioning method is proposed. Firstly, the edge point of pixel accuracy level is located by sobel operator to narrow the positioning range, and the gradient direction of the point is obtained. Secondly, taking the point as the center of the edge model, the gray value of the target and background along the edge is obtained by bimodal statistical algorithm for the pixels in the model region. Finally, according to the geometric model and the parameters obtained in the first two steps, the moment involved in the operation is reduced to one first moment to avoid the operation of the higher moment, so as to improve the positioning accuracy. The experimental results show that this method has higher positioning accuracy and better anti-noise interference ability than other sub-pixel positioning methods based on moments.
Key words:image processing; sub-pixel; edge location; moment
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
科技视界(2016年26期)2016-12-17
新教育时代·教师版(2016年26期)2016-12-06
科技视界(2016年21期)2016-10-17
企业导报(2016年10期)2016-06-04
