基于多属性决策的无人驾驶自主变道决策技术研究
2020-03-27 02:42:30李宇寂鲁奉军王迪尚秉旭
汽车文摘 2020年4期
李宇寂 鲁奉军 王迪 尚秉旭
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词: 无人驾驶 行为决策 变道决策
1 前言
随着无人驾驶技术的飞速发展,无人驾驶汽车的运行环境也从单一的封闭场地扩展到普通的开放城市道路,城市道路的最基本工况是车道保持和车道变换。随着车辆上布置的传感器不断丰富,无人驾驶系统可以从周围环境获得更多的信息,从而为车辆自主判断行为决策带来可能。然而即使是有经验的驾驶员在做变道动作的时候也是格外小心,因此无人驾驶系统进行变道行为分析需要非常的准确和谨慎,才能保证足够的安全性,这也正是目前为止还没有非常完善的无人驾驶变道系统的原因。针对无人车的行为决策难题,不同的学者提出了多种方法来辅助车辆进行自主决策:熊璐[1]对无人驾驶系统的行为决策技术现状做了综述,提出目前行为决策技术主要分基于规则的决策和基于学习的决策两大方向;杜明博[2]提出通过决策树的计算来进行车辆动作的判断;陈佳佳[3]提出一种新的驾驶行为灰色理想值逼近模型,用于进行决策评判,使得被选方案不仅在空间位置上与最优方案较为接近,同时,其模型形状也贴近于最优方案。
本文提出一种新颖和精确的变道决策技术,其整个系统的处理过程为:先根据不同决策(车道保持、向左换道和向右换道)所对应的不同车辆周围环境,计算其所生成的安全性指标集,再将其乘以相应的权重从而得到不同的安全性概率,最后选取最大的概率所对应的车辆动作作为最终行为决策的输出。
2 车辆行驶时采取变道行为的相关决定因素
有经验的驾驶员使车辆的驾驶状态一直处在自己的监视中,并对其进行评估,而这个评估的结果也就是当时的驾驶风险。驾驶风险通常反映了驾驶员对当前驾驶环境的理解,因此也很大程度上反映了无人驾驶车辆需要关注的环境风险以及不同风险对应的重要程度。在变道行为决策中,有经验的驾驶员主要关注车辆与前后左右障碍物的相对距离以及相对速度,选择最安全的路线进行行驶。无人驾驶车辆同样需要结合周围障碍物的相对位置关系以及相对速度关系来进行接下来行为的判断,选择风险最小的驾驶行为决策。
根据车辆与障碍物的相对位置关系和相对速度关系选择如下5类指标作为变道行为的相关决定因素。
(1)车辆的车道居中指标
(2)车辆与前方障碍物的相对距离
(3)车辆与后方障碍物的相对距离
(4)车辆与前方障碍物的安全性指标
(5)车辆与后方障碍物的安全性指标
车道居中指标:车辆在正常行驶时,应该尽量保持在道路中间,并且出于安全考虑不应频繁变道,所以将传感器获得的车辆与左右边界的距离转换成车辆的车道居中指标。
车辆与前方障碍物的相对距离:车辆距离前方障碍物的距离能有效反映车辆是否处于安全状态,该距离越长车辆越安全。车辆在当前时刻进行车道保持或者向左变道,向右变道决策时,与前方障碍物存在不同的相对位置关系,从而得到不同的相对距离指标。
车辆与后方障碍物的相对距离:同车辆与前方障碍物的相对距离指标,车辆在当前时刻进行车道保持或者左右换道决策时,与后方障碍物存在不同的相对位置关系,从而得到不同的相对距离。
车辆与前方障碍物的安全性指标:车辆距离前后方障碍物的安全距离虽然能一定程度上反映车辆的安全状态,但由于车辆与障碍物的相对速度也会影响车辆的安全状态,所以必须要同时引入相对距离和相对速度才能得到车辆与前方障碍物的安全性指标。
车辆与后方障碍物的安全性指标:与车辆与前方障碍物的安全性指标类似,区别仅在于研究对象变为车辆后方的障碍物。
3 变道行为相关决定因素的权重
在无人驾驶的行为决策中,不同指标在决策中所起作用的大小是不同的,正如有经验的驾驶员会将更多的精力放在与前车距离的控制上,而将较少的精力用于使车辆保持在车道线中央。因此为了准确地输出变道决策无人驾驶策略的研究者需要给不同的指标更准确的描述,将指标集根据影响因素的大小分成主要指标和次要指标,并配以不同的权重,最终组成合理的属性指标集。
4 不同指标的求解
为了完成上述5类指标的定量计算,需要车辆多个传感器输入不同的感知信息,需求的传感器信号输入如表1所示。
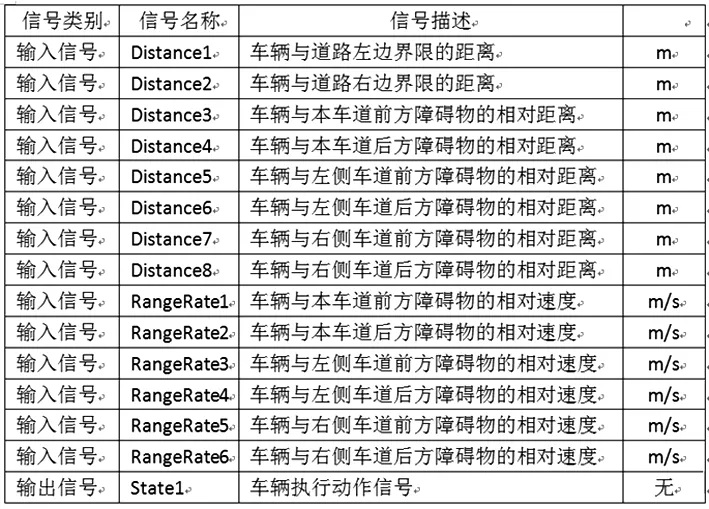
表1 传感器信号输入
4.1 车辆的车道居中指标
车辆在正常行驶时,应该尽量保持处在道路中央,并且出于安全考虑不应该经常变道,所以可以将传感器输出的车辆与左右边界的距离转换成车辆居中的指标,计算如下:

如图1,Distance1和Distance2如表1所示为车辆与左右两侧边界的距离,DistanceMax为车辆距离左右两侧道路边界距离差的最大值。
4.2 车辆与前方或者后方障碍物的相对距离
车辆距离前后方障碍物的距离通常能有效的反应车辆是否处于安全的状态,距离越远越安全,由于传感器的有效探测距离是有限的,所以可以设定安全距离为其探测的最大有效范围,认为前方或者后方障碍物距离在其有效范围以外是安全距离,此时车辆可以继续车道保持行驶。
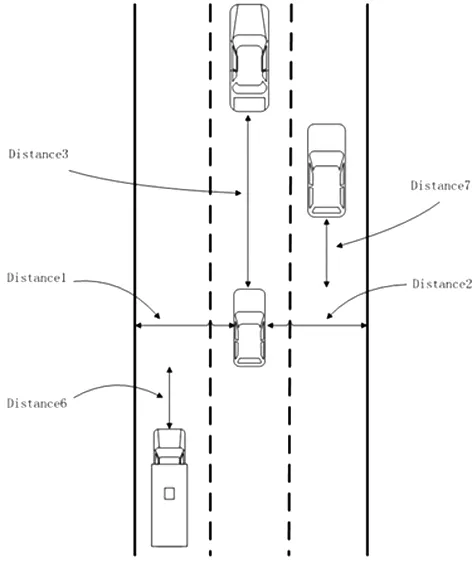
图1 车辆前后和左右道路边界的距离
如表1,DistanceX表示车辆与前后方障碍物的距离 (Distance3,Distance4,Distance5,Distance6,Distance7,Distance8);DistanceSafe为设定的安全距离
4.3 车辆与前方或者后方障碍物的安全性指标
车辆距离前后方障碍物的安全距离指标虽然能一定程度上反应车辆的安全状态,但由于车辆与障碍物的相对速度也会影响车辆的安全状态,所以必须要同时引入相对距离和相对速度才能得到车辆与障碍物的安全性指标
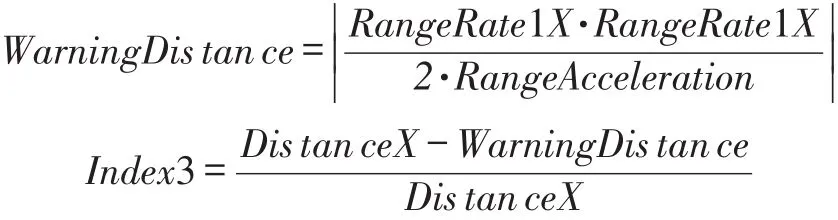
参看图1,DistanceX表示车辆与前后方障碍物的 距 离(Distance3,Distance4,Distance5,Distance6,Distance7,Distance8),RangeRateX表示车辆与前后方障 碍 物 的 相 对 速 度(RangeRate1,RangeRate2,RangeRate3,RangeRate4,RangeRate5,RangeRate6),RangeAcceleration为设定的相对加速度,WarningDistance为根据当前相对速度和相对加速度计算的安全警示距离。
5 多属性决策指标权重的计算
在求解多属性决策问题的过程中,使用权重值来定量地表示属性间相对的重要程度。设wj为属性Cj的权重值,则有=1。采用经典层次分析法来确定由熟练驾驶员驾驶经验制定的决策矩阵主观权重,针对驾驶员选取相应驾驶行为所关注因素的不同,对熟练驾驶员进行问卷调查,获取驾驶决策过程中的主要属性值,确定各属性基于驾驶经验的权重。
6 车辆行为决策的输出
虽然很多因素都会影响车辆在当前情况下的行为决策,但不同的因素对最终决策影响度是不同的,因此需要对不同因素赋予不同的权重。通常认为车辆的车道居中指标和相对距离指标只能部分反映车辆所处的安全状态,车辆的安全性指标更能决定车辆与前后方障碍物的安全性,所以实际策略中会对车辆的安全性指标赋予更大的权重。最终的决策输出为先根据不同的指标乘以相应的权重得到不同的安全性概率,再选取最大的概率所对应的车辆动作,作为最终行为决策的输出。

其中Pr obVector表示车辆执行不同动作(车道保持、向左变道和向右变道)所对应的安全性概率向量,IndexMatr ix表示车辆的决策矩阵(由车道居中指标、相对距离指标和安全性指标构成),WeightVector表示不同指标赋予的权重。
7 实验测试
为验证变道决策算法的正确性,在红旗H7车型上进行实车验证,通过激光雷达获得车辆周围障碍物的信息,在Autobox(快速原型控制器)上运行变道决策模型计算决策输出,实际测试时,让车辆分别以不同的速度三次接近前方障碍车辆,最终得到如下三组实验结果。
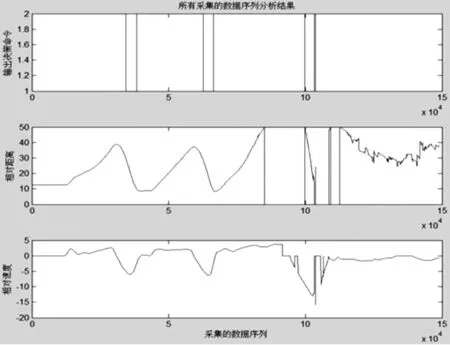
图2 数据序列分析结果
结合图2和图3可以看出:
(1)车辆在这轮试验中以不同的相对速度总共进行了3次靠近障碍物的试验,分别在不同的相对距离下得到了3次变道决策的输出。
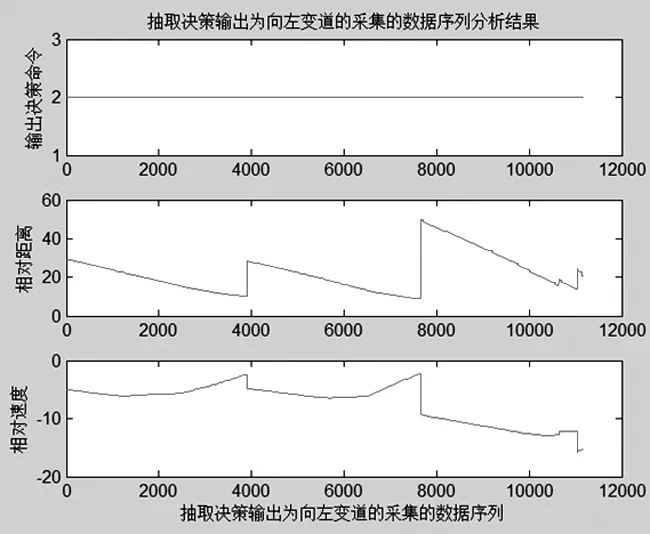
图3 向左变道采集的数据系列分析
(2)从图2可以看出,实车的试验过程中,在一定的相对速度下,当车辆与前方障碍物距离小于决策的分界点时,系统会输出向左变道的决策。
(3)从图3可以看出,前两次变道决策输出时,车辆与障碍物的相对速度比较一致此时决策的分界点也较接近,最后一次变道决策输出时,车辆与障碍物的相对速度比前两次大,此时决策的分界点对应的相对距离明显大于前两次变道命令输出的相对距离。
8 结论及启示
本文为无人驾驶汽车设计了一套精确的变道行为决策系统,通过传感器感知车辆周围不同障碍车辆的相对位置关系,计算其所生成的安全性指标集,再将其乘以相应的权重从而得到不同的安全性概率,最后选取最大的概率所对应的车辆动作作为最终行为决策的输出。
在复杂的交通环境下,安全保守的驾驶决策是最稳妥的驾驶策略,即使对于有经验的驾驶员变道超车也不会是经常的行为,本文提出的决策技术是定量计算各项指标来决定决策输出,并没有完全借鉴熟练驾驶员的类人化驾驶策略,因此某些情况下不会是最舒适的决策;同时为了得到更高的通行效率,车辆可以在保证安全的前提下采用更激进的变道决策,这样就需要对影响变道决策的因素进行更精细和全面的计算,同时结合通行效率的因素,这也正是未来的工作方向。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08 06:13:30
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
科学(2020年3期)2020-11-26 08:18:28
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
中国交通信息化(2015年10期)2015-06-06 06:39:31
城市道桥与防洪(2014年5期)2014-02-27 07:26:44