
基于慧鱼模型的气压传动起重机设计
2020-03-24 11:10:34任雪丽指导老师
科学技术创新 2020年2期
任雪丽 王 伟(指导老师)
(武昌工学院 机械工程学院,湖北 武昌430000)
慧鱼创意组合模型的优点在于可以反复拆装,实现各种类型的组合。通过学校慧鱼实验室的模型和反复拼装本文将创意组合包中的气压传动元件与生活中的实际应用的起重机进行设计组合,装配成更具优势的气压传动起重机模型。
1 气压传动起重机模型结构设计
1.1 模型设计
市面上液压起重机主要由起升机构、运行机构、变幅机构、回转机构、金属机构,动力装置,操纵控制及、辅助装置组合构成,并且各类起重机都有一定的吨数限制,提升吨数较高物体的起重机活动范围受限,回转时对于场地的面积有一定要求,因此活动不是很灵活。反之比较灵活的起重机通常提升吨数相对较少,应用场合范围有一定限制。因此设计了基于慧鱼模块的气压传动起重机模型,将驱动系统改为气压传动。气压传动能够使起重机的吨数提高且回转、行走灵活。动力装置主要是气压传动。使用慧鱼的零件模型和液压起重机在实际应用中,可将起重机液压传动机构改为模型中的气压传动机构。用气缸代替液压缸,通过对应的控制阀控制气缸的充气放气,从而使起升机构运动。然后设计出气压传动起重机模型,用慧鱼模块拼出实物模型。如图1 所示。
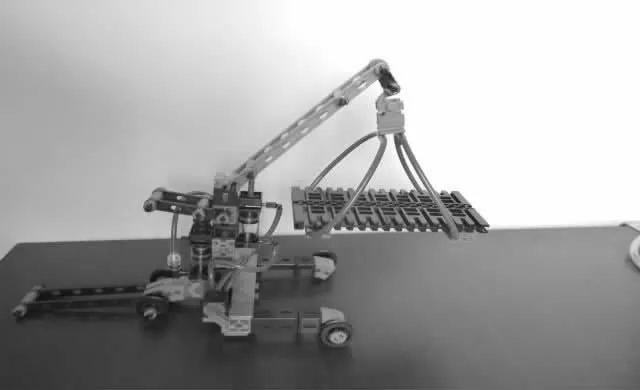
图1 气压传动起重机模型
1.2 气压传动起重机组件介绍
设计的气压传动起重机主要由驱动系统、气压系统、起升机构、回转装置和操控及控制装置等部分组成。驱动系统由电动机,电池,电源开关构成。由电池的通电断电控制气缸的控制阀,从而控制起升机构的运动。气压系统是由储气罐、控制阀、气缸和管路等组成,为整个起重机提供气压,并通过控制阀,使起升机构运动,从而完成工作任务的系统装置。回转装置主要由底盘上的回转机构组成,能使起重机进行360 度的回转运动,可以节省转送物料的时间,大大提高工作效率。运行机构是由长臂和起重勾组成,能够直接完成物料的转移。长臂、起重勾的下降上升都是由气压系统的控制阀控制。气压传动控制的升降可有效缓解一般起重机的间歇性停顿,不会在一段时间内较快上升或下降,运动平稳并且不会对物料造成意外损害。
1.3 安装过程
确定设计方案后开始安装,安装顺序如下:
(1)安装起重机机的底盘,并且在底盘上安装回转装置,使起重机在必要的条件下能够四周旋转,能够提高工作效率;
(2)安装气压传动系统中的储气罐、气缸A1、A2、控制阀V1安装在底盘上;
(3)安装长臂、起重勾和模拟重物;
(4)安装起重机尾部的驱动系统;
(5)安装起重机的输气管线路;
(6)起重机模型安装完成。
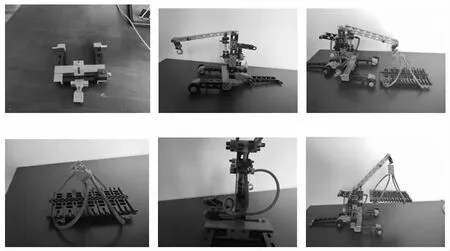
图2 安装过程
2 气压传动工作原理
接通电源开关后,气压传动起重机的电动机开始转动,从而通过气缸上面的拉杆带动气压泵不停地往复伸缩,并使产生气压储存在储气罐内,通过管路输送到各个气缸,通过气压系统中机体侧面的控制阀控制气压流动,使相应气缸往复伸缩,驱动起升机构中的长臂起落,同时配合回转装置和变幅机构,最终完成指定的工作任务。起重机的输气管路由储气罐连接到V1 控制阀(每个控制阀的内侧有A、中、B3 个接气口,相对的外侧为阀杆)中间接气口,V1 控制阀的A、B 接气口分别连接到长臂气缸A1 的上下端接气口。
3 气压传动起重机的运动分析
气压传动起重机起升机构的运动主要有长臂的升降。长臂运动传输路线:电动机→拉杆→气压泵(机械能转化为气压能)→控制阀→长臂气缸(气压能转化为机械能)→长臂升降。控制阀示意图如图2 所示,当控制阀V1 的阀杆处于“中”时长臂不运动。当阀杆处于1 时长臂下降。阀杆处于2 时长臂上升。通过控制阀V1 对长臂的控制和其他机构的组合使用,可以使起重机完成工作任务。控制阀位置工作表见下表。

控制阀位置工作
4 结论
通过慧鱼气压传动起重机的电动机带动拉杆运动,再带动气压缸往复伸缩产生气压,并通过控制阀控制气压流动,从而控制起重机长臂和起重勾的运动;同时,配合变幅机构和回转装置即可完成一系列连续的指定动作。由于此设计结合了慧鱼模型的设计特点,可能对于工实际还有些差距,但设计构想与实际应用有一定的启发和参考价值。
猜你喜欢
民主与法制(2020年16期)2020-08-24 06:54:40
中国外汇(2019年15期)2019-10-14 01:00:50
中国外汇(2019年14期)2019-10-14 00:58:30
中国特种设备安全(2018年10期)2018-12-18 02:16:46
石油化工自动化(2018年5期)2018-11-14 02:34:30
石油化工建设(2018年2期)2018-07-11 01:24:56
工业设计(2016年7期)2016-05-04 04:02:06
设备管理与维修(2016年5期)2016-03-16 02:20:47
工程建设与设计(2016年4期)2016-02-27 10:51:16
船舶标准化工程师(2015年5期)2015-12-03 11:00:24
