
SPWM 算法在污水提升泵中的应用
2020-03-24 03:49冯仁宽何志琴
智能计算机与应用 2020年11期
冯仁宽,何志琴,杨 莹
(贵州大学 电气工程学院,贵阳 550025)
0 引言
变频水泵可以通过调节频率来改变电机的转速从而调节流量,达到节能的目的。此外,变频水泵还有启动电流小,维护工作量小的优点。对此设计了一种交流电机SPWM 变频调速系统,使用脉宽调制技术对逆变器的开关管组合顺序的控制,使逆变器输出的波形能够逼近理想的波形,同时使用SPWM技术能够使得进入电动机的电流谐波减小,电机振动降低,改善系统的动态特性[1]。虽然SPWM 和其它一些控制方法相结合后的控制性能没有SVPWM好,但其实现较为简单,成本较低,在对性能要求不高的情况下具有较好的使用价值,适用范围较广[2]。实现电压SPWM 信号的方法,可以分为硬件法和软件法。其中硬件法常用专用的集成电路来实现,而软件法采用实时计算的方法来生成波形,实现起来较容易且成本较低。因此,为了获得SPWM 信号,就需要建立数学模型。常用的数学模型方法主要有:计算法、调制法、谐波消去法、采样法等[3]。本文采用采样法中的不规则采样。
TMS320F28335 数字信号处理器较F2812 各方面性能更优。F28335 是一款浮点型DSP,其运算用硬件来实现,可以在单周期内完成,因而其处理速度高于F2812 定点DSP。F28335 在实现高精度复杂算法时尤为突出,为复杂算法的实时处理提供了保证,是一款专用于高性能电机控制的芯片[4]。因此为提高采样精度本文采用不规则采样法,虽然计算量较规则采样法大,但因F28335 具有强大的数据处理能力,所以完全能够实现变频调速的控制算法。
1 变压变频基本原理
在调速过程中,磁通的变化或者不稳定会导致调速的失控。如磁通下降时,异步电机的电磁转矩会降低,此时在额定转速以下时会失去恒转矩机械特性,甚至导致异步电机的堵转;磁通上升时,可能会使电机磁饱和,导致励磁电流迅速上升,增加了电机的铁芯损耗,效率降低。因此,为了获得较好的调速效果,需保持磁通的恒定,本文主要采用恒压频比的控制方法。
由电机学原理可知,交流异步电机的定子绕组的感应电动势有效值的计算为:

其中:fs是定子电源电压的频率;Ns是定子每项绕组串联匝数;Ks是基波绕组系数;φm是每极气隙磁通[5]。
Es在实际中通常难以测量,但由于加在阻抗上产生的压降相比电源电压小很多,通常可以忽略,即Es≈Us。为保证Us/fs=N(N为常数),即改变电压的同时,频率也要改变,以此达到恒磁通的目的,满足输出转矩恒定,这就是VVVF(变压变频)控制。
2 TMS320F28335 主要模块
由于F28335 中EPWM 模块能够占用最少的CPU 资源和中断,可以灵活的配置波形,相比F2812采用事件管理控制,F28335 中每个EPWM 模块都是独立的。每个EPWM 模块由两路EPWM 输出组成,分别为EPWMXA 和EPWMXB,这一对PWM 输出可以配置成两路独立的、且相互对称的双边沿PWM 输出。通过EPWM 模块中时基模块、计数比较模块、动作模块、死区模块、斩波模块、错误联防模块、时间触发模块[6],通过在程序中的协调配合来产生一系列的方波,从而控制逆变器开关管的组合顺序以产生电压波形。
2.1 SPWM 变频调速硬件电路
本文设计的变频调速系统是以TI 公司的专用DSP 芯片TMS320F28335 为控制核心,实现异步电机的变频调速控制。此系统的逆变电路部分由交-直-交电压型逆变电路构成,如图1 所示。通过SPWM 技术控制开关管的通断,使其产生SPWM 波。
2.2 SPWM 变频调速程序设计
SPWM 是将正弦波变成宽度渐变的脉冲波,这种脉冲波的变化规律等价于正弦波。SPWM 调制法也称作三角波调制法,产生原理是采用一组等腰三角形波信号(载波)与正弦波信号(调制波)通过比较器进行比较,其交点时刻作为开关管的导通和关闭时刻。当调制波(正弦波)大于载波(三角波)时,逆变桥的开关管导通,反之关断,逆变器则产生一组等幅不等宽的脉冲序列[7]。本文采用了不规则的SPWM 算法,如图2 所示。

图1 主电路结构图Fig.1 Main circuit structure diagram
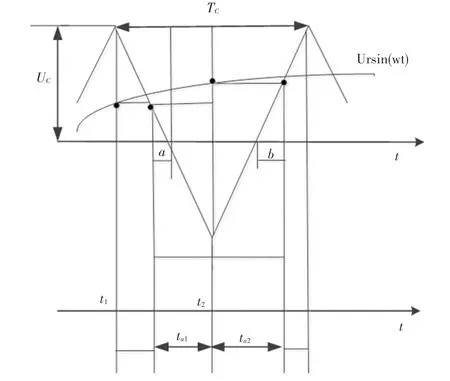
图2 不对称规则采样法Fig.2 Asymmetric regular sampling method
由图2 可知:
由三角形的相似关系可得:
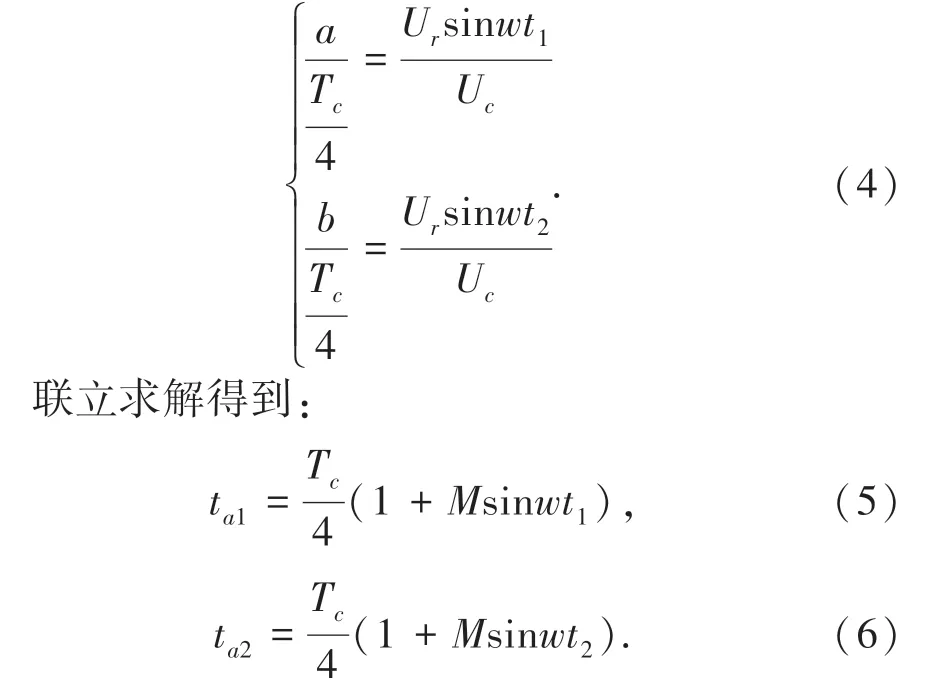
然而生成三相SPWM 波,须通过三条相位互差120 度的正弦调制波和同一三角载波求其交点,在交点处比较调制波与三角载波的大小,以控制逆变器的开关通断。设三相正弦电压为:

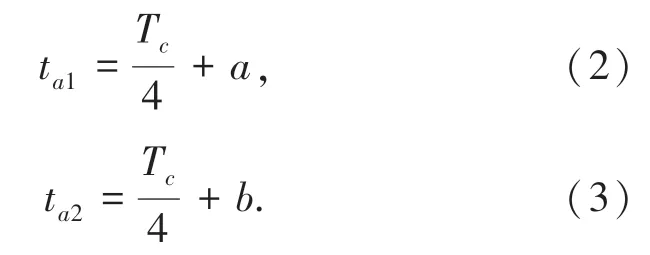
考虑到规则采样法虽然容易计算,但在每个载波周期内只能采样一次。为提高采样精度,本文采用不规则采用法。即在每个载波周期内采样两次,即在底点对称轴采样,又在顶点采样的方法。
当在底点采样时:
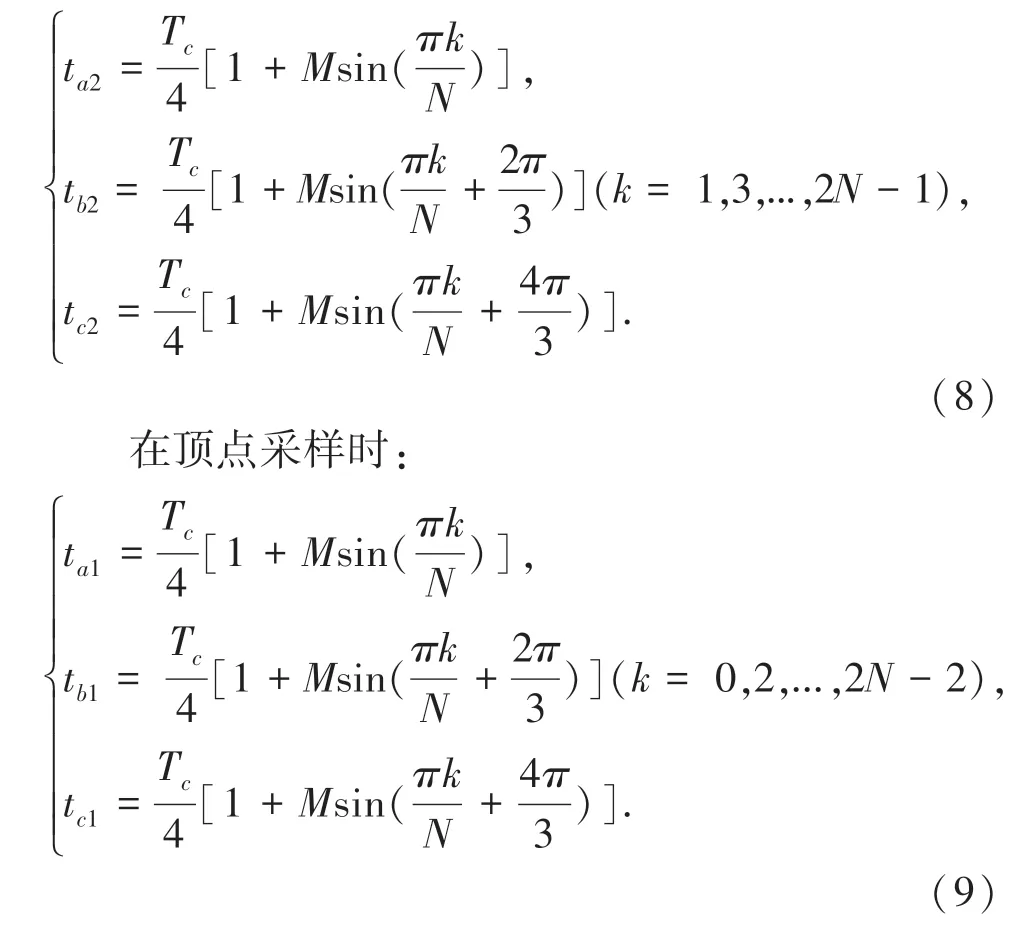
式中:k为采样序号;M=Ur/Uc为调制度(0<M <1);N=fc/fr为载波比。
因此,三相SPWM 波的每相脉宽等于三角载波周期内的顶点采样时间与低点采样时间之和。
PWM 调制方式可分为异步调制和同步调制两种,载波信号和调制信号不保持同步的调制方式称为异步调制。在异步调制方式中,通常保持载波频率固定不变,而当信号波频率变化时,载波比N是变化的。如果载波比N等于常数,并在变频时使载波和信号波保持同步的方式称为同步调制。在三相PWM 逆变电路中,通常公用一个三角波载波,且取载波比N为3 的整数倍,以使三相输出波形严格对称[7]。在低频时通常采用异步调制法,其它频率时采用同步调制法,也可采用分段调制的方法。在本程序设计中,将参数制成了一张表存储在DSP 中,见表1。这样可提高程序的运行效率,即通过简单的条件语句即可判别对应的N值。在此载波比N取3 的整数倍。

表1 载波比和载波频率Tab.1 Carrier ratio and carrier frequency
根据式(5)可知:参数Tc、M、N 确定后,即可编程计算出 SPWM 波的每相脉宽时间。基于TMS320F28335 的DSP 软件实现,采用不规则采样法。整个程序设计主要包括两部分,即主程序和SPWM 中断服务子程序。在主程序中完成各个时钟及外设的初始化配置,并根据输入的调制波频率计算N、2N 及确定M 值,等待中断产生。EPWM 中的定时器采用连续的增减计数模式,在每个载波周期产生一次下溢中断。进入中断服务子程序后,根据式(10)分别计算出ta、tb、tc的值,并将其存入EPWM的3 个比较器,通过动作模块寄存器输出PWM 波形。程序通过F28335 的浮点来处理计算,提高了运算速度。中断服务子程序的控制流程如图3 所示。
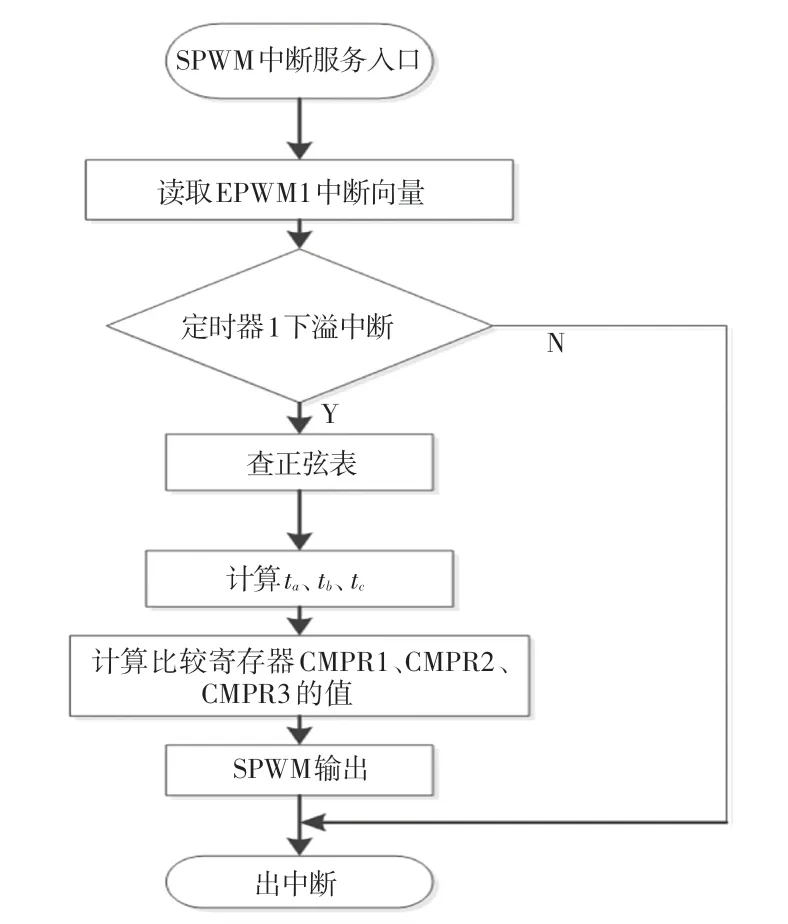
图3 SPWM 中断服务子程序Fig.3 SPWM interrupt service subroutine
2.3 实验结果与分析
在DSP 开发环境下创建工程,编译通过后,将程序烧写进DSP 控制器。载波比设置为表1 中的数值情况下,通过示波器观测由EPWM1A 采集到的波形,如图4 所示。可见其为一系列幅值相等、占空比按正弦规律实时变化的波形,与控制程序实现的功能相一致。
3 SPWM 的MATLAB/SIMULINK 仿真
通过matlab 提供的simulink 工具箱,来搭建模拟SPWM 变频调速系统[8-9]。通过示波器观察系统的波形图,其模型如图5 所示。
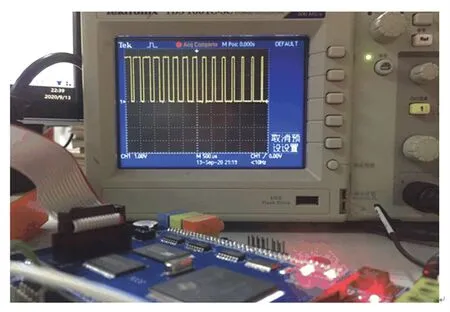
图4 SPWM 波形Fig.4 SPWM waveform
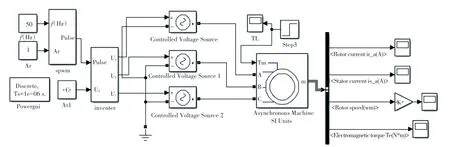
图5 系统仿真模型Fig.5 System simulation model
实现VVVF 控制,由式(11)可知:

改变电机的转速,电机的频率也随之改变,即达到变压变频的目的。
图6 为输出的SPWM 波信号,与图4 实验结果相符。图7、图8 为频率分别是50 Hz、20 Hz 的转速波形图。由此可以看出,输入频率的改变,使得电机的转速也随之减小,即实现了变频调速的目的。由上述公式可知转速与频率的关系,理论与仿真结果相同,且速度波形在t=0.3 s 时,突加负载的情况下,也较稳定,证明了变频调速的可行性。

图6 SPWM 仿真波形Fig.6 SPWM simulation waveform
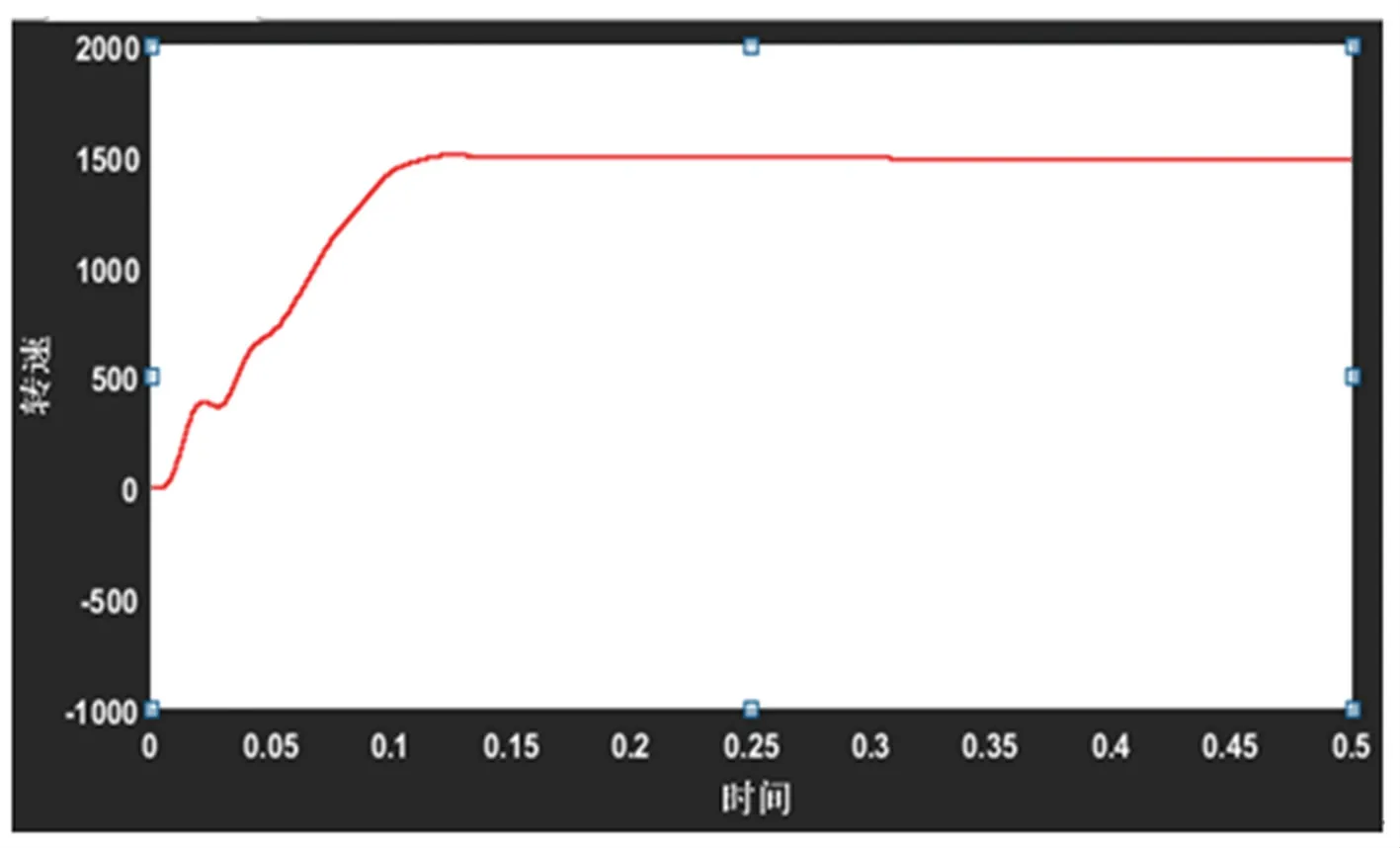
图7 50 Hz 时转速示波器图形Fig.7 Speed oscilloscope graph at 50 Hz
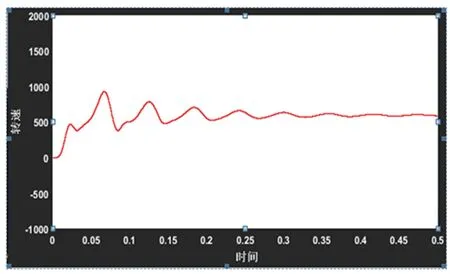
图8 20 Hz 时转速示波器图形Fig.8 Speed oscilloscope graph at 20 Hz
4 结束语
针对自然采样法需要求解复杂的超越方程,规则采样法采样精度低等特性,本文采用了不规则采样的方法,并且通过使用TMS320F28335 控制器的浮点计算可以快速运算出结果,并在示波器上显示SPWM 波形。通过实验和仿真,证明变压变频调速的可行性,具有一定的实际意义和理论价值。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
内燃机与配件(2022年2期)2022-01-17
建材发展导向(2021年18期)2021-11-05
中国空间科学技术(2021年1期)2021-03-16
现代养生·下半月(2018年4期)2018-09-04
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
