
复合机器人的应用和发展综述*
2020-03-22 03:31:08张广才张俊杰蔡彦伦何继荣
机械工程与自动化 2020年1期
张广才,张俊杰,蔡彦伦,何继荣
(1.哈工大机器人 (扬州)科创中心 人工智能研究所,江苏 扬州 225000;2.扬州哈工科创机器人研究院有限公司 技术研发中心,江苏 扬州 225000;3.哈尔滨工业大学 机电工程学院,黑龙江 哈尔滨150001)
0 引言
随着人类科学发展水平的不断提高,机器人成为科技发展的代表产物[1-2],它能够让人们从危险的、简单重复的生产作业中解放出来,显著提高人类生活与生产的便捷性。机器人种类很多,如移动用的机器人自主移动平台、工业用的机械臂机械手、语音机器人等。其中,复合机器人是建立在前期机器人技术之上,进一步开发得到的机器人品种。
复合机器人指由移动底盘和机载装置集成,可实现移动和附加功能的机器人。它包括作战复合机器人(移动平台+武器系统)、轮履复合机器人(轮子+履带)、AGV+机械臂复合机器人、串并联复合机器人等。其中,带有移动底盘和机械臂集成的,可实现移动和抓取任务的复合机器人是研究的主要方向。复合机器人并非简单的智能移动底盘和机械臂的组合,还包括将地图构建技术、自主导航技术、自主避障技术、视觉技术、物体抓取技术等一系列高端技术通过合理手段进行集成,是非常复杂的高科技产品。
复合机器人可以将其他机器人单一且前沿的功能技术结合起来,如移动机器人负重状态下的自动导航寻路功能、机械臂的抓取功能、语音机器人和人类的音频或文字交流功能,可提高生产生活的自动化水平,是机器人发展的重要方向。
1 复合机器人关键技术
1.1 智能移动底盘技术
智能移动底盘技术主要包括机械运动、地图搭建、路线规划以及自主导航。就机械运动形式来讲,目前普遍采用轮式、履带式和腿式等运动方法[3]。比较而言,轮式移动机器人尽管在运动的稳定性和精确的轨迹控制上受路面路况的影响很大,但其具有重量小、负载大、结构简单、驱动和控制相对方便、行进速度快等优点[4]。现阶段复合机器人厂商都采用轮式移动底盘,由伺服电机带动运动轮转动来实现底盘的运动。
环境地图的构建是移动底盘的关键技术,通常采用定位和地图构建(Simultaneous Localization And Mapping,SLAM)技术实现。SLAM技术是指机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。SLAM算法采用基于高频率扫描的传感器(激光雷达等),高度依赖扫描数据与现有的地图进行对照匹配,以确定机器人的相对位姿,并与多分辨率的地图配合使用(Hector_SLAM[5]),或者结合测量数据的动态似然估计[6]。图1为SLAM地图构建。
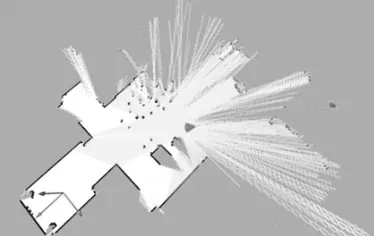
图1 SLAM地图构建
移动底盘的另一关键技术是如何在已架构完成的地图的基础上,规划出一条到达指定位置的合理路线;并在机器人运动到目标点的过程中避开那些移动障碍物,即基于已知地图的路径规划。目前常用的算法包括Dijkstra算 法[7]和 A* 算 法[8]。 研 究 人 员 对 于SLAM技术和基于先验地图的导航技术在传统环境中进行尝试,并得到了很好的应用[9-10]。另外考虑到拓展市场的需要,这些算法应能够在低价的传感器上运行良好,并能够取得较为精确的路径规划[11]。
1.2 机械臂技术
机械臂主要由运动元件、导向装置、手臂组成,具有自由度高、可调节性强、结构设计简单的优点;但也存在零部件磨损、平衡性低等缺点。机械臂是机器人应用中最广泛的产品,技术比较成熟。目前全球市场上工业机械臂厂商主要有发那科、库卡、安川、ABB四大家族:国内比较知名的有万方自动化、科马等。
机械臂技术主要包括运动和轨迹规划,其中机械臂的运动研究主要分为正运动学分析与逆运动学分析。如今正运动学分析有D-H法;但对逆运动学,仍然需要开创性研究和发展[12-13]。
2 复合机器人国内外研究现状
2.1 复合机器人国外研究现状
1980年以来,国外开始研究复合机器人。1984年,德国的弗劳恩霍发明了一种可移动机械臂,命名为MORO,它被认为是最早的轮式移动机械臂样机模型。但由于理论研究尚未成熟,MORO并未能投入市场[14]。20世纪90年代以来,越来越多的研究者们开始了复合机器人的研究。1996年,美国斯坦福大学的研究人员研制的一款复合机器人可以在外界环境中实现自主避障[15]。
Williow Garage公司于2006年研制成功一款名为PR2的复合机器人。PR2采用轮式移动底盘,有两条机械臂,每条机械臂具有7个关节,手被制作成夹紧机构;头部、躯干、关节、夹紧机构上安装有精密的摄像装置。依托ROS(Robot Operating System)系统,PR2可自主完成多种非简单性的任务,如开关门窗、自主充电、拾取递送物品、与工作人员进行娱乐互动等等。
Kuka公司推出一款名为KMR iiwa的机器人(见图2),它拥有智能移动底盘和机械臂,可视作典型的复合机器人。该机器人可以在狭窄的空间内实现精确定位,车辆和机器人都由锂离子电池直接供电。

图2 KMR iiwa复合机器人
Fetch Rbotics公司于2015年研究成功一套用于仓储的复合机器人,如图3所示。其中一个机器人名为Fetch,有一个机械臂搭载在移动底盘上,利用基于ROS开发的各种移动底盘技术,按订单提供的内容,将商品从货架上取出并放置在另一机器人上,由另一机器人运输。

图3 Fetch复合机器人
2.2 复合机器人国内研究现状
国内科研机构也对复合机器人进行了研究。2016年王鑫研究了基于双目视觉的移动机械臂抓取控制[16],同年高斌研究了该类装置的运动规划问题。
市场方面,国内复合机器人以新松、仙知为主。新松采用自家机械臂和移动底盘,拥有长期的研究成果,于2015年推出第一款复合机器人HCR20,如图4所示。该机器人采用自然轮廓导航技术,有效负载达20 kg,其机械臂与移动底盘安全互锁,实现了机械臂的远程移动操作,至今卖出数百台,是国内复合机器人研究成果市场转化的成功案例。

图4 新松复合机器人
此外,国内还有大族、青岛海通等公司进行了复合机器人的生产。由于成果积累不够深厚,研发费用较高,开发复合机器人产品的企业数量并不多。除了头部企业,市面上还有数十家左右企业在进行复合机器人研发,如哈工大、普华灵动、浙江科钛、智伟达、米克力美、广州亚陆、西安艾优智合等。图5为国内复合机器人产品。

图5 国内复合机器人产品
3 复合机器人的应用领域
3.1 工业生产领域
复合机器人在工厂及仓储物流领域有着广泛的应用前景,如在机床上料、机床工具更换、质量检验、过程链接等环节均有不同程度的应用。复合机器人在自动化生产车间的基础上,进一步提高了车间生产的智能化程度。车间作业中,复合机器人能够完全自主移动,在车间内部结构不改变的条件下,替代人工完成所有的取送服务,使生产线不再被束缚于只生产单一型号的产品,大大提高了车间生产线的灵活性,有效地解决了人们对工厂无人生产和非标定制产品生产的需求[17]。
3.2 养老服务领域
目前养老服务机器人的主要服务是语音交流、智能看护、远程医疗等,对于老人由于实际行动不便而造成的生活上的问题并未得到很好的解决。而复合机器人的出现可以帮助老弱病残运送物品、搀扶引路,大大缓解了老人因行动不便而带来的各种麻烦。机器人可以24h不间断工作,工作保质保量(只要有相应程序设置),且避免了人类因情绪产生的各种不确定因素。在不远的未来,养老服务将成为复合机器人的重要应用市场[18-20]。
3.3 文娱教育领域
游乐场、博物馆、科技馆等公共服务场所大多设置了服务机器人,这些服务机器人的功能主要是导游和咨询,无法完成进一步的人机互动。复合机器人搭配语音交流功能后,可以在文娱教育领域实现更深入更广泛的应用。配合移动底盘、机械臂的使用,可以实现导游、引路、行李搬运甚至陪玩互动等服务。机器人工作稳定,不会疲劳,能大大提高服务质量的稳定性,并减轻人力成本支出。
4 总结
本文简要介绍了复合机器人的关键技术和发展现状,并分析了复合机器人的应用前景。尽管各行各业对复合机器人有强烈需求,但其广泛使用还需进一步的技术研发和市场验证。复合机器人的研发难点在于需要对移动底盘和机械臂两个主要模块的技术都熟练掌握,并保证两者协同工作。同时,未来哪个模块作为研发核心,也是复合机器人技术发展必须面临的抉择。
猜你喜欢
当代工人(2020年8期)2020-05-25 09:07:38
小溪流(画刊)(2017年12期)2018-01-10 16:07:29
科技知识动漫(2016年8期)2016-07-29 20:40:09
学习月刊(2016年19期)2016-07-11 01:59:38
专用汽车(2016年4期)2016-03-01 04:14:20
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25 00:41:49
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
