基于蚁群算法的网络层析故障链路诊断*
2020-03-22 03:13:10康英来范晓波
通信技术 2020年3期
康英来,范晓波
(中国电子科技网络信息安全有限公司,四川 成都 610000)
0 引言
故障链路会带来网络服务的中断,定位网络中的故障链路非常重要,将有助于网络工程师和因特网服务提供商(Internet Service Provider,ISP)监视网络性能,并提供与客户约定的服务水平协议(Service Level Agreement,SLA)相匹配的网络服务。很多原因都可能导致链路故障,除了物理链路故障之外,一些如路由器配置错误等“软”错误也会导致链路连接失败[1]。
为了定位网络中的故障链路,最直接的方法是在网络内部节点部署探针监测链路性能参数。然而,出于安全或商业因素考虑,内部节点通常是不协作的,使得直接监测变得不可行[2]。近年来,一种叫作网络层析成像(Network Tomography)的技术[1-4]广泛应用于链路故障诊断中。该技术在网络边缘节点发送探测包,通过探测包的行为推断网络中的链路状态。由于网络层析成像仅利用节点的转发行为,不需要内部节点的合作,因此相对直接测量它具有更广泛的应用场景。
采用网络层析技术识别故障链路的思路最早由Padmanabhan 和A Coates 等人[2-3]提出。这种框架首先选择某些边缘节点作为探测点,探测点与探测点之间形成探测路径,然后在探测路径上发送探测包。假设网络中存在一些故障链路,显然经过故障链路的探测包是不可达的。通常0表示正常(非故障)链路,1表示故障链路,因而链路的状态是布尔型的。类似地,探测路径的状态也是布尔型的(即1 表示路径不可达,0 表示路径正常)。故障链路诊断的目的是从路径的状态推断链路的状态,这可建模为一个优化问题,即找出最小的链路失效集,以解释探测路径的状态。
然而,这个优化问题是多项式复杂程度的非确定性(Nondeterministic Polynomial,NP)完全的[5]。当前文献广泛采用贪婪式算法求解。文献[5]提出一种基于因子图-和积方法来估计先验概率;基于同样的思想,文献[6]提出一种类似的方法CLINK,联立多个路径状态方程估计链路故障的先验概率。然而,由于先验概率的估计需要长时间的路径测量,会影响链路推断的实时性。文献[7]提出了一种线性规划(Linear Programming,LP)松弛方法来定位网络中故障的链路,实验验证该方法在某些情况下精度较高。文献[8]提出一种迭代算法TOMO 方法,在每次迭代中选择失效路径经过最多次数的链路当作故障链路。该方法易于实现,容易扩展至大规模网络。
不同于上述链路故障定位方法,本文提出一种基于蚁群算法的网络层析故障链路诊断框架。蚁群算法最初用来解决旅行商问题(Traveling Salesman Problem,TSP)[9],后来被引进用来分析普遍意义上的优化问题。受它在解决NP 完全问题时具有优良解特性的启发,本文首次将其引入到网络故障链路诊断。
1 模型与框架
遵循当前网络分析中的约定,本文将网络的逻辑拓扑代替网络实际拓扑。逻辑拓扑可由图G=(V,L)来表征,其中V为图的顶点集合、L为图的边集合。网络拓扑中,顶点vi∈V可以表示物理拓扑的主机或路由设备,而边li∈L表示顶点之间的单个链路或多条链路。不失一般性,假设网络中共有n条链路。
为了监测网络中的链路状态,从顶点集合V中选择一部分节点S⊂V(通常为边缘节点)作为探测点,探测点与探测点之间形成探测路径,然后在探测路径上发送探测包。令布尔变量yl表示路径pl的状态,布尔变量xk表示链路ek的状态。此外,约定对于路径和链路均用0 代表正常,用1 代表不可达或故障。显然,经过故障链路的探测包始终是不可达的。因此,对于探测路径pl,有式(1)成立:

其中“∨”表示布尔代数中的OR 操作,rlk也是布尔变量,表示pl是否经过链路ek(当且仅当路径pl经过链路,rlk取值为1,否则为0)。式(1)的含义显而易见,即当路径经过任意一条故障链路时,则路径不可达。
假设网络中共有m条探测路径。由于对于每条探测路径都有类似等式(1)成立,为了简便起见,将m个等式写成矩阵形式,即有[7]:

式(2)中的每一项都由式(1)确定。其中,y=(y1,y2,…,ym)为m维向量,代表m条探测路径的状态;x=(x1,x2,…,xn)为n维向量,代表n条链路的状态;R=[rlk]为一个m×n的矩阵;⊙为布尔矩阵中的相乘操作。由于网络中的路由相对固定,因此链路故障诊断便建模为给定布尔向量y和布尔矩阵R,求解布尔向量x。
在实际网络中,根据探测路径不能完全确定链路状态,式(2)存在多个解。为了得到x的值,转而求解如下优化表达式[6-7]:

然而,求解式(3)是NP 完全的。由于链路或路径的状态是布尔型的,式(3)是一个典型的0-1规划问题,或者是一个组合优化问题。本文尝试利用蚁群算法求解式(3)得到网络链路状态。值得注意的是,不同于将蚁群算法运用到网络路由寻优[10],本文不是网络寻路问题,而是将其建模为解决故障链路诊断中的优化问题。
2 蚁群算法求解故障链路
蚁群算法是根据蚁群觅食行为而得来的一种算法,具有分布计算、信息正反馈(通过信息素)和启发式搜索的特征。蚁群算法首次用来解决旅行商问题[9],后来被引进用来分析普遍意义上的优化问题,特别是在解决组合优化问题中具有独特的优势[11]。本文将其引入到网络故障链路诊断框架。
在定位网络故障链路时,首先将蚂蚁随机放置到网络的各个探测点,然后蚂蚁在网络中进行随机行走,行走的路线不应违背式(2),即只能在不可达路径对应的链路上行走,蚂蚁会在沿途释放出一种叫做信息素的物质,这种物质会影响后来的蚂蚁路线,指导其以较大概率选择信息素较多的链路。如此迭代,最终使得优化表达式(3)的优化目标变小,从而解决本文的故障链路求解问题。
蚁群算法的相关符号定义如下:
Na:蚂蚁数量,蚂蚁数量不宜过大和过小,如果太大则信息素分布太均匀,反之易陷入局部最优点,根据文献[9]的建议,蚂蚁数量约为网络节点数量的1.5 倍;
Nb:网络节点数;
Q:信息素常数,表示蚂蚁遍历一次所释放的信息素总量,值越大,则蚂蚁受到信息素选择链路的影响越大,收敛越快,但也容易收敛至局部最优点;
τij(t):在t时刻,网络节点i和网络节点j之间的信息素浓度(节点i、j构成网络里的一条链路);
蚂蚁在运动过程中,其运动路线受链路上信息素浓度的影响,具体来说,在t时刻,蚂蚁k的转移概率为:

其中α为信息素浓度的指数参数;allowk表示蚂蚁当前位置下一个可行的网络链路,它需要符合优化表达式(3)的优化条件,即只能在不可达路径对应的链路上行走,且不包含已经经过的链路。需要注意,在经典的蚁群算法中,转移概率还和启发函数有关。由于在优化目标(3)中,所有链路权重一样,因此问题中不应有启发函数。
当所有蚂蚁走完全程时,此时表达式(3)中的条件y=R⊙x得到满足,即完成搜索故障链路的一次迭代,在下一次迭代开始,更新每条网络链路的信息素:

每只蚂蚁由于走过路径不一样,在链路上留下的信息素的量也不一样。经过的链路数越少,即表达式(3)的优化目标越小,此时应在经过的链路上留下较多的信息素,以指导后来的蚂蚁以较大概率选择这些链路。蚂蚁k在网络节点i和网络节点j之间留下的信息素数量为:

其中Lk为蚂蚁k在本次迭代中经过的链路数目。由此可见,若经过的链路数目越少(即||x||1的值越小),留下的信息素越多,后来的蚂蚁更有可能经过这些链路。
蚁群算法求解故障链路的算法流程是在式(4)~式(6)之间迭代,直到满足最大迭代次数或状态改变少于预设阈值,然后将当前链路的信息度浓度按降序排序,逐步选择排序靠前的链路直到满足式(3)中的优化条件,此时所选的链路便是算法诊断的故障链路。
注意和传统的蚁群算法相比,求解故障链路的蚁群算法在初始放置点和可行路径上都受约束。蚁群的初始放置点只能放在探测点上,且所有蚂蚁必须在不可达路径对应的链路上行走。同样,一次迭代过程中蚂蚁不需要回到最初出发点,只需其行走的路径满足表达式(2)即可。
传统的蚁群算法在迭代开始前,在所有链路上的信息素相等。为了使得算法更快收敛,本文在上述蚁群算法上做如下改进。
在初始时刻,链路上的信息素和经过该链路的不可达路径数成正比,即:

其中,nij为经过节点i和节点j的不可达路径数目,c为预设的常数。通过式(7)设置链路的初始浓度后,蚂蚁将倾向于选择被多条不可达路径经过的链路。这显然和优化表达式的优化目标一致,从而加速算法的收敛。
综上所述,本文蚁群算法求解故障链路的算法流程如下:
1.输入网络拓扑、路由矩阵R,路径测量y;
2.初始化蚁群算法各个参数;
3.随机放置蚂蚁到各个探测点,按式(7)初始化各链路的信息素浓度;
4.对于每只蚂蚁,根据式(4)不断选择下一个网络节点直到满足条件(2);
5.根据式(5)更新信息素;
6.根据式(6)更新转移概率;
7.重复步骤3~步骤6,直到满足最大迭代次数;
8.输出链路状态x,其中状态为1 的链路即为故障链路。
3 仿真和性能分析
为了验证本文所提算法的有效性,在真实的网络拓扑上进行试验。网络拓扑采用Rocketfuel 项目[12]所测量的实际ISP 骨干网络拓扑AS1755。AS1755 是欧洲的骨干网络(Ebone),总共含有163 个路由器和300 条链路。所有实验都是在MATLAB 上编码完成。
试验假设网络中故障链路占比为q,q值表示网络所遭受的故障级别。实验仿真在不同的故障级别下算法的性能,设定q从0%到25%。为了诊断网络中的故障链路,设置网络中度为1 的边缘节点为探测节点,然后在探测节点间按照最短路径路由建立探测路径,由此可建立布尔矩阵R。在探测路径上发送探测包,并记录探测路径的状态,由此可得路径测量向量y。根据算法流程表1,即可获得网络中的故障链路集合。
实验首先分析了在求解故障链路时,改进前的蚁群算法和优化初始信息素改进后算法的收敛速度。为了判断是否收敛,将当次得到的链路状态和上次迭代得到的链路状态进行比较。若连续5 次迭代的链路状态均一样,则判定算法已经收敛。实验结果如图1 所示,可以看出,在定位网络故障链路时,若采用所有链路上的信息素相等的初始条件,算法要在150 次后才开始收敛;而采用式(7)改进后的蚁群算法,迭代100 次左右就进入收敛状态,从而能够大幅度减少算法运行时间。
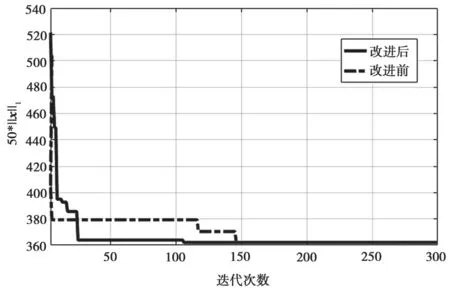
图1 改进前和改进后的蚁群算法在链路故障定位中的收敛速度
同样地,将本文提出的算法和其他故障链路诊断算法进行了比较。由于TOMO 算法[8]简单易实现且能取得较好结果,它广泛运用于链路故障诊断中。本文采用精度(Precision)和召回率(Recall)两个性能指标和TOMO 进行比较。精度是预测正确的故障链路数占预测故障链路总数的比例;召回率为预测正确的故障链路数占实际故障链路数的比例。两者计算如下:

其中,TP为被判定为故障链路,而事实上也是故障链路的数目;FP为被判定为故障链路,但事实上是正常链路的数目;FN为被判定为正常链路,但事实上是故障链路的数目。
实验结果如图2 和图3 所示,分别表示不同算法进行链路诊断时的精度和召回率。可以看出,本文方法在性能上相比TOMO 算法有一定改进,尤其是在诊断精度上,且当网络中故障链路较多时,这种优势逐渐明显。TOMO 方法在迭代时选择失效路径经过最多次数的链路当作故障链路,这种选择有可能会误判一些正常链路,且这种选择是不可逆的。本文蚁群算法在选择时是一种概率选择,本次迭代的错误诊断有可能在下次迭代中被蚁群“修正”。事实上,本文可以在TOMO 算法基础上进行蚁群算法迭代,即将TOMO 算法的运行结果作为蚁群算法的初始状态,从而改进网络层析中故障链路的诊断精度。
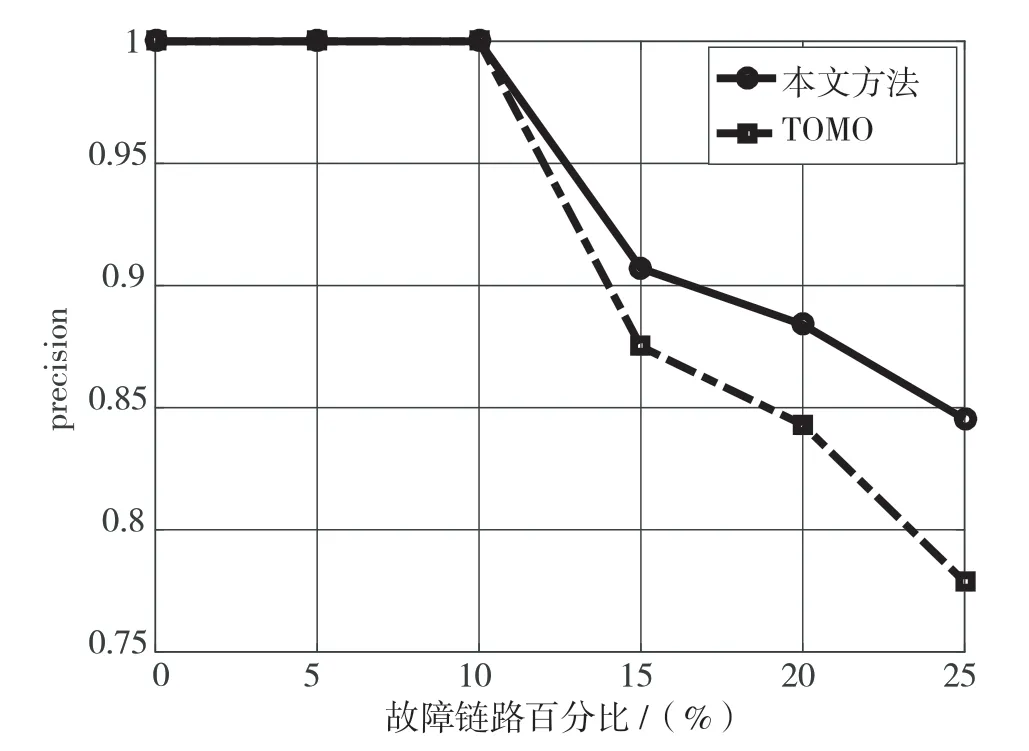
图2 不同算法进行链路诊断时的精度
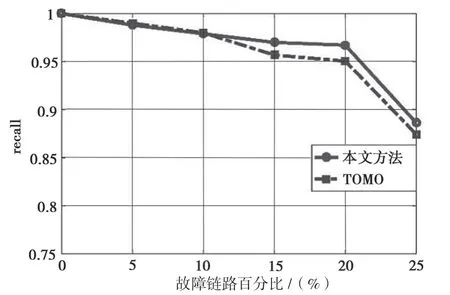
图3 不同算法进行链路诊断时的召回率
4 结语
本文提出了一种新的网络故障链路诊断方法。首先将故障链路诊断问题建模成一个0-1 规划问题,由于该问题是NP 难的,本文利用蚁群算法在解决组合优化问题中独特的优势,提出基于蚁群算法的故障链路诊断方法。不同于传统的蚁群算法,求解故障链路时蚁群在初始放置点和可行路径上都受约束。本文利用故障链路求解中优化目标的特性,对蚁群算法的初始信息素浓度进行优化,以加快算法的收敛速度。在网络拓扑中的仿真结果表明,本文算法在故障链路检测中具有较好的精度和召回率。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
小学生作文(低年级适用)(2019年5期)2019-07-26 00:45:10
读友·少年文学(清雅版)(2018年12期)2018-04-04 05:16:40
少儿科学周刊·儿童版(2017年5期)2017-06-29 01:27:44
学苑创造·A版(2017年3期)2017-04-27 13:17:17
家庭百事通(2016年3期)2016-03-14 08:07:17
山东青年(2016年3期)2016-02-28 14:25:52
学苑创造·A版(2014年6期)2014-08-04 03:48:20
中国交通信息化(2014年3期)2014-06-05 03:07:09