基于三维人脸特征分析的无人机跟拍系统
2020-03-18 09:42陆昌欣吕纪龙
智能计算机与应用 2020年10期
陆昌欣, 王 澍, 吕纪龙
(上海工程技术大学 电子电气工程学院, 上海 201620)
0 引 言
早期研究四旋翼无人机时更加注重无人机姿态控制。随着时代的进步,技术不断更新迭代,以及人脸识别技术不断成熟,研究者开始将无人机与人脸识别技术结合起来,在四旋翼无人机上安装摄像头,利用无人机实时捕捉图像。通过对图像中人脸特征的分析,达到识别人脸的目的。二维的人脸识别技术已经相对成熟,但是二维人脸识别的技术在许多方面还存在问题,如识别精度不高,对动态图像的识别准确度比较低,对人脸的识别速度相对较慢,实用价值不高。三维人脸识别技术相比二维人脸识别技术具有以下优势:
(1)三维人脸不受到亮度信息、光照、姿态等因素影响,抗干扰能力更强;
(2)人脸是一个三维的非刚性的物体,在分析结构时,有着一定的鲁棒性;
(3)对人脸的识别精度高,有更好的视觉体验。
目前常见的三维人脸识别算法有:基于空域直接匹配的算法、基于局部特征匹配的算法、基于整体特征匹配的算法[1]。本论文基于三维人脸特征分析,进一步讨论了三维人脸识别在无人机跟拍中的应用,建立了一个基于三维人脸特征分析的无人机跟拍系统,实验表明此系统具有较好的鲁棒性和稳定性。
1 三维人脸识别算法
基于局部特征的算法就是从人的面部提取一定的特征,如:眼睛、眉毛、鼻子、嘴巴等,这些特征能够将人脸完整的表现出来。在人脸变化的情况下,这些特征点依然能保持特征不改变。如何在人脸三维图像中提取出有用的局部特征,是局部特征算法的关键。本论文主要介绍的局部特征匹配算法中的曲线特征。
把人脸的三维曲面看做是由无数个二维曲线组成,这样就可以把三维人脸匹配问题降低到二维,降低计算的难度。基于面部曲线匹配的三维人脸识别的方法,如图1所示。具体步骤:先将降维的图像二值化处理,再将眼睛、鼻尖、鼻根、嘴角这几个特征点提取出来;把人的脸部进一步对齐,建立一个对齐的统一坐标系;在坐标系里选择过对称面的侧隐线、眼睛下侧的水平曲线和鼻尖区域曲线这三条曲线,把它们变成特征向量做对比,实现人脸的识别。在三维的环境下,人脸是变化的,这样就会给基准曲线的获取带来困难,不过可以通过人面部对称的特点,由原始的面部特征通过最小二乘法拟合出相应的对称面,这便可以找到对称面的中心侧隐线,解决基准曲线的获取困难的问题,完成识别过程[2]。
2 无人机目标跟拍设计
搭建四旋翼无人机硬件平台,在飞控的芯片中写入基于三维人脸特征分析的无人机跟拍算法。无人机起飞,打开双目摄像头开始跟拍;在空中悬停,执行三维人脸识别的算法,检测需要跟踪的人脸,若目标在视野范围内,便预测目标移动位置,随后开始执行跟踪算法。在一定的时间内,检测目标是否丢失,在没有丢失情况下,判断是否达到拍摄需求,达到就结束跟踪。
如果在一定的时间内,检测的目标丢失了,无人机会根据预测目标移动位置跟踪T秒,再开始执行三维人脸识别的算法,检测需要跟踪的人脸,开始新的一轮跟踪。
如果一开始目标不在视野范围内,无人机开始执行搜索算法,在检测到目标之后,然后执行跟踪算法。后续也是在一定的时间内开始检测目标是否丢失,没有丢失情况下,判断是否达到拍摄需求,达到要求即结束跟踪。三维人脸跟拍的流程如图2所示。
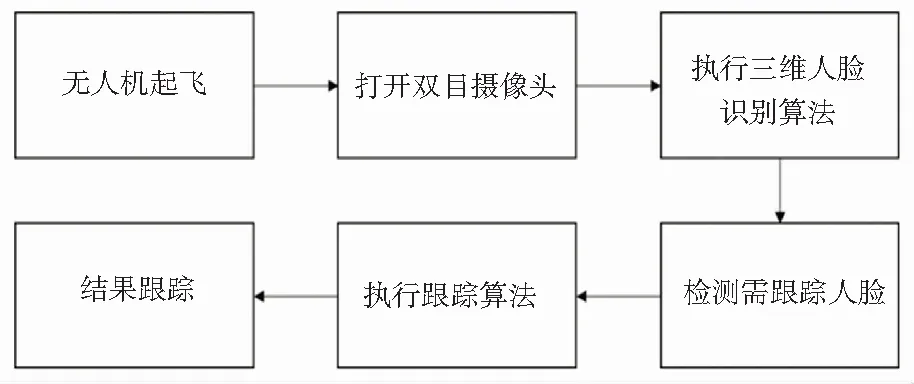
图2 三维人脸跟拍的流程
3 实验测试
本实验中无人机通过三维人脸识别算法对三维人脸特征进行分析,通过三维人脸的捕捉、跟踪拍摄,无人机可以执行小幅度转身、慢速下大幅度转身等姿态,也可以适应目标移动下的跟踪拍摄。通过设定部分飞行参数(如高度等)实现自动状态下的低空拍摄。
通过计算机仿真,测试算法对三维人脸特征的分析性能,经测试在光线充足,且距离人脸大于1.5 m的情况下,都可以识别到人脸,测试的结果如图3所示。
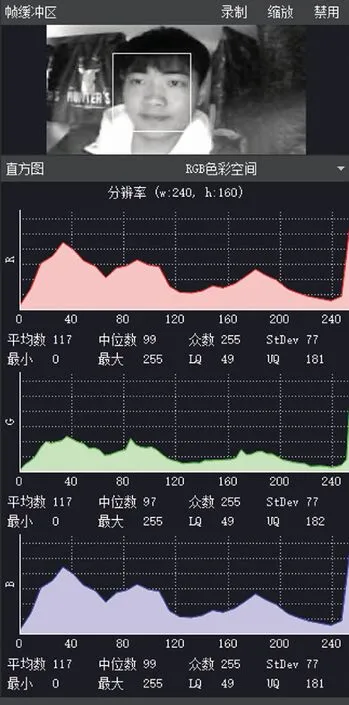
图3 人脸识别结果
4 结束语
本文设计了一种基于三维人脸特征分析的无人机跟拍系统,实验结果表明,该系统在三维的环境下,可以有效的检测出人脸,且能够有效地进行跟踪拍摄。本系统可以应用于新闻的户外拍摄、三维环境下的人物跟踪拍摄。可以给图像、视频的拍摄带来一种脱离人体持机的拍摄体验,节省了人力、物力的同时,提供了一种全新的跟踪拍摄方式,突破当今的拍摄限制。
猜你喜欢
传染病信息(2022年2期)2022-07-15
体育科技文献通报(2022年5期)2022-06-05
中国应急管理科学(2022年1期)2022-04-18
作文中学版(2022年1期)2022-04-14
少儿美术·书法版(2021年9期)2021-10-20
奥秘(2021年5期)2021-06-15
文萃报·周五版(2021年17期)2021-05-31
通信产业报(2018年10期)2018-04-13
地震研究(2017年3期)2017-11-06
米娜·女性大世界(2016年8期)2016-08-17