
侧扫雷达在线流量监测系统在西江流量监测中的应用—以梧州水文站为例
2020-03-11 03:08朱颖洁
广西水利水电 2020年1期
朱颖洁
(梧州水文中心,广西 梧州 543002)
0 引言
梧州水文站集水面积327 006 km2,占西江流域集水面积的94.6%,控制了广西境内85%的来水。流量监测常用方法为水文测船牵引走航式ADCP和流速仪动船法,备用方法为比降面积法和浮标法。为了解决高洪以上水位级流量在线监测难题,2019年7月底在梧州水文站安装侧扫雷达开展比测试验。侧扫雷达测验断面上游约2000 m 是干流浔江与支流桂江交汇处,下游180 m为云龙大桥,当以干流浔江来水为主时,中泓居右,以支流桂江来水为主时中泓居左。受上游约15 km的长洲水利枢纽工程的调蓄、发电、泄洪等影响,中低水的水位陡涨陡落、流量急剧变化。测验河段顺直,无分流串沟,河岸无崩塌现象;河床由砂砾石、细沙组成,偶有冲淤,左右岸为土坡,均较稳定,断面右侧为岩质深潭,最深处河底高程约-27 m,左侧为沙质河床,略有冲淤,水面宽在510~660 m之间(如图1)。
梧州水文站河段水流形态复杂,目前实现高洪以上水位级流量在线监测仍是一大难题。在梧州水文站研究基于侧扫雷达的在线流量监测系统的应用,分析侧扫雷达流量测验的适用性,开展侧扫雷达获取的河流表面流速比测分析工作,可为梧州水文站实现各水位级流量在线监测奠定基础,对侧扫雷达的推广应用具有重要意义。

图1 梧州站侧扫雷达测流断面图
1 侧扫雷达
1.1 侧扫雷达功能
侧扫雷达采用非接触式雷达技术,实现对河流表面流场、网格点流速进行连续监测,并提供网络数据服务,通过水位、过流面积、断面表面流速比的数据交互,完成流量数据网络合成,实现全天候、连续自动河流流量监测。
产品主要包括2个部分:天线系统和雷达系统。主要组件包括2 个发射天线、6 个接收天线、1 个主机箱、8 根馈线电缆、1 个支撑架、1 根电源线及 1 根数据接口线组成。
1.2 系统主要技术指标
(1)技术指标:①探测河面宽度:15~1000 m;②测速范围:0.025~20 m/s;③测速误差(均方根误差):≤0.01 m/s;速度分辨力:≤0.01 m/s。
(2)环境适应性:①工作温度:室外-40~50℃;②储存温度:-50~60℃;③海拔高度:≤5000 m。
(3)天线位置:①水平方向:距水面20 m以内;②垂直方向:高出水面5~15 m;③朝向河面视角:大于±45°。
(4)环境要求:①河宽:最小30 m,最大250~1000 m;② 流速:0.025~20 m/s;③ 水深:最小15 cm;④水波纹高度:最小2~3 cm。
1.3 测流原理
侧扫雷达兼容脉冲多普勒体制及调频连续体制,天线共址,收发分开。信号部分采用直接射频采样、数字正交相参混频、FIR 数字滤波和抽取、DDS 频率合成、多普勒处理、高精度定向算法等技术措施;雷达数据传输采用以太网通信技术或其他通信方式完成。
侧扫雷达工作时,河水对微波的回波信号主要是布拉格散射。接近和后退波的能量可以分离开,独立进行处理,接近和后退能量区域重叠接近零的多普勒频移的小部分。采用频率带宽为30 MHz 的调频连续波波形,可达到5 m 的距离分辨率。对回波数据进行常规延迟-多普勒处理。同时利用6 个八木天线信号的幅度和相位响应,采用多重信号超分辨处理算法确定回波位置。测向算法独立用于每个频率和延迟距离门上,角分辨率为1°。原始数据进行中值滤波以剔除异常值。多重信号超分辨处理算法将观测空间分解为正交的信号子空间和噪声子空间。信号子空间由6个八木天线接收到的数据协方差矩阵中与信号对应的特征向量组成,噪声子空间则由协方差矩阵中所有最小特征值(噪声方差)对应的特征向量组成。算法利用这两个互补空间之间的正交特性来估计空间信号的方位。噪声子空间的所有向量被用来构造谱,所有空间方位谱中的峰值位置对应信号的来波方位。增强型超分辨处理算法提高了测向分辨率,适应于任意形状的天线阵列。
2 分析方法
(1)表面流速比测。由于梧州水文站未设有缆道测流设施,无法进行缆道流速仪水面一点法与侧扫雷达表面流速比测,测船流速仪法受航运影响存在困难,因此拟采用走航式ADCP 表层流速替代转子流速仪水面一点法。为了验证走航式ADCP表层流速与侧扫雷达表面流速比测的可行性,首先进行走航式ADCP表层流速和缆道流速仪水面一点法流速比测,选择在其他缆道站进行。为使走航式ADCP 表层流速尽可能接近于水面流速,采用三体船搭载盲区较小的M9 型ADCP,在侧扫雷达断面低、中、高水位级各进行1次流量测验,每次施测3个测回,分别提取6个测次的表层流速,与侧扫雷达流速叠加到横断面流速分布图进行对比。
(2)流速关系率定分析。采用走航式ADCP 施测不少于30份流量,在高、中、低不同水位(或流量)级均匀分布测次,利用实测流量计算侧扫雷达测流断面的平均流速,与侧扫雷达获取的河流表面流速计算的指标流速建立相关关系,进行系统误差、随机不确定度计算和关系曲线检验;对不同流速关系率定模型推算流量与整编流量进行相关特征值综合对比分析,进一步论证侧扫雷达流量测验成果的合理性。
3 表面流速比测
梧州水文站在2019年9月4日进行了侧扫雷达表面流速和M9 型走航式ADCP 表层流速的比测工作。比测期间水位变化为8.11~8.22 m,属于中水位,比测的M9 表层流速实测最大为1.90 m/s,最小为0.026 m/s,雷达表面流速实测最大为2.64 m/s,最小为0.010 m/s。比测结果(见表1)表明侧扫雷达二阶平滑表面流速与M9 型走航式ADCP 平均表层流速的相对误差小于5%为13 条,在24 条垂线中占54.2%;相对误差小于10%为17 条,在24 条垂线中占70.8%;中水中泓位置侧扫雷达表层流速与走航式ADCP 表面流速横向分布基本一致,侧扫雷达表面流速数据准确性较高。
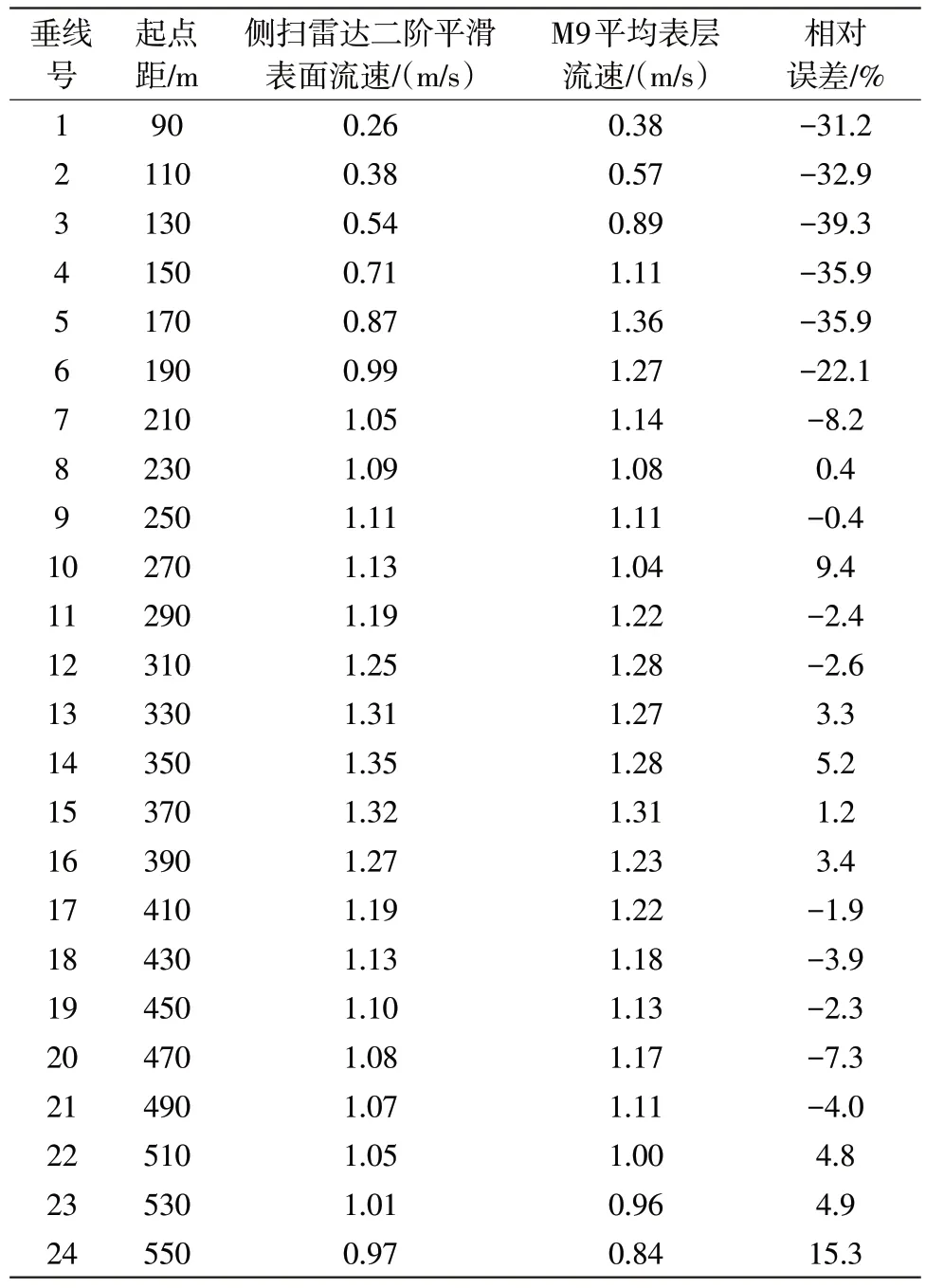
表1 侧扫雷达表面流速与M9型走航式ADCP表层流速比测成果
4 侧扫雷达指标流速关系率定
4.1 率定期间水文情势
梧州水文站从8月2日开始侧扫雷达表面流速和走航式ADCP 平均流速的比测工作,8月2日~10月14日水位在10.86~2.61 m间变化,共收集到39份比测资料,低水位(<6.5 m)15 份、中水位(6.5~16.5 m)24 份。比测期间比测资料的最高水位10.79 m,最低水位2.93 m,水位变幅7.86 m,占梧州水文站历年实测最大水位变幅(最高水位27.80 m,最低水位1.38 m)的29.8%;比测的实测最大流量为13 500 m3/s,最小为2250 m3/s;比测的实测最大断面平均流速为1.19 m/s,最小为0.33 m/s。
4.2 指标流速与断面平均流速相关关系率定分析
实测断面平均流速采用走航式瑞智ADCP两个测回4 个测次的流量平均值除以测时大断面面积,走航式ADCP 的流量测验严格按照《声学多普勒流量测验规范》(SL337-2006)及其它相关规范执行。对侧扫雷达表面流速计算的指标流速和走航式ADCP实测平均流速分别建立相关关系,并进行比测精度分析(见表2)。

表2 计算断面平均流速与实测断面平均流速关系模型分析统计表
神经网络模型[1]以水位和指标流速为输入,断面平均流速为输出,经试算,隐含层层数取1,建立(2,p,1)BP 神经网络模型,其中神经元数目p取8,隐层的神经元采用tansig 传递函数,输出层的神经元采用线性传递函数,训练函数选用traingdm,学习率取0.1,动量项取0.9,目标取0.00 001,最大训练次数取500 000。从表2可知,神经网络模型的相关系数0.99 110 和二元线性模型的相关系数0.98 965最接近1,相关性最好;二元线性模型误差≤±8%的合格率为71.8%,误差≤±11%的合格率为74.4%;神经网络模型误差≤±8%的合格率为71.8%,误差≤±11%的合格率为74.4%;综上所述采用二元线性模型和神经网络模型分别建立流速关系模型。
梧州水文站为流量一类精度站,根据《水文资料整编规范》(SL247-2012)表3.3.2-1 规定,一类精度的水文站采用单一曲线法定线时定线精度指标为:系统误差±1%,不确定度8%;由于侧扫雷达测量表层流速方法相似水面浮标法测流,根据《水文资料整编规范》(SL247-2012)3.3.2规定采用水面浮标法测流定线随机不确定度可增大2%~4%;最后确定梧州水文站测流定线随机不确定度为10%~12%。
从流速关系模型检验计算表(见表3)可知,二元线性模型和神经网络模型适线检验、符号检验和偏离数值检验均合格,系统误差<1%,随机不确定度<12%,侧扫雷达流量测验精度符合规范要求。
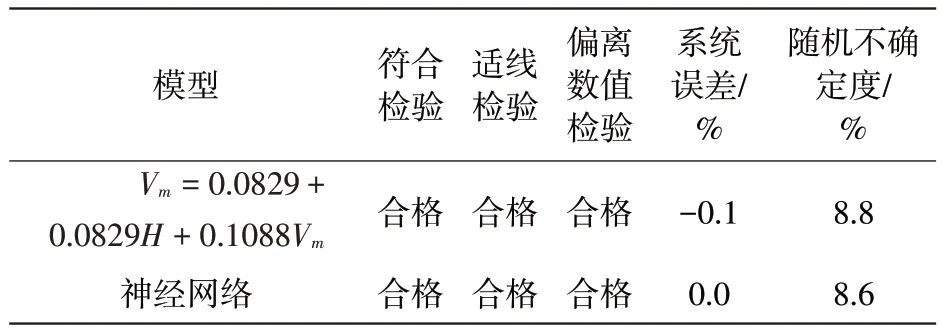
表3 流速关系模型检验计算表
4.3 流量对比分析
4.3.1 流量过程线合理性分析
分别采用二元线性和神经网络流速关系模型推算流量与整编流量进行对比分析。推算流量与整编流量对比图见图2。
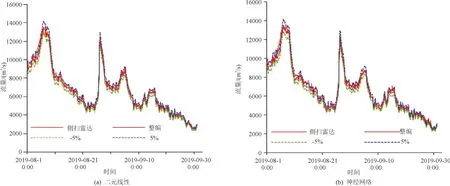
图2 推算流量与整编流量对比图
从图2 可以看出,采用二元线性模型和神经网络模型算出的流量大部分时间落在整编流量±5%范围内,说明基于二元线性模型和神经网络模型推算出的侧扫雷达流量是合理的。
4.3.2 流量对照分析
8月、9月份日平均流量对比分析合格率见表4,特征流量对照表见表5。

表4 8、9月份日平均流量对比分析合格率统计表
由表4 可知,二元线性模型和神经网络模型计算的8月、9月份日平均流量误差≤±11%的合格率为100%,推算的侧扫雷达日流量与整编值基本一致。
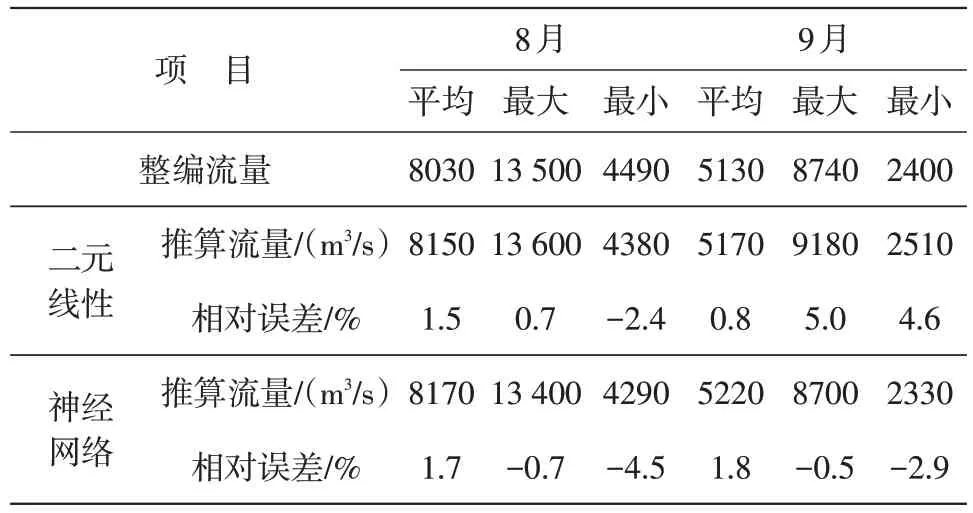
表5 8、9月份特征流量对照表
由表5 可知,二元线性模型推算8月平均流量与整编值相差1.5%,8月最大流量相差0.7%,8月最小流量相差-2.4%,9月平均流量相差0.8%,9月最大流量相差5.0%,9月最小流量相差4.6%,二元线性模型推算的特征流量与整编值基本相近,满足推流定线要求;神经网络模型推算8月平均流量与整编值相差1.7%,8月最大流量相差-0.7%,8月最小流量相差-4.5%,9月平均流量相差1.8%,9月最大流量相差-0.5%,9月最小流量相差-2.9%,神经网络模型推算的特征流量与整编值基本相近,满足推流定线要求。
4.4 模型检验
对流速关系模型建立后16 d(10月15~30日)的流量进行分析,检验模型的应用效果。10月15~30日日平均流量对比分析合格率统计表见表6,特征流量对照表见表7。

表6 10月15~30日日平均流量对比分析合格率统计表
由表6可知,二元线性模型和神经网络模型推算10月15~30日日平均流量误差≤±8%的合格率为93.8%,误差≤±11%的合格率为93.8%;推算的侧扫雷达日流量与整编值基本一致,模型应用效果较好。

表7 10月15~30日特征流量对照表
由表7可知,二元线性模型推算10月15~30日日平均流量与整编值相差3.7%,最大流量相差0.3%,最小流量相差12.5%;神经网络模型推算10月15~30日日平均流量与整编值相差5.6%,最大流量相差10.9%,最小流量相差-4.7%;说明侧扫雷达推算特征流量与整编值基本一致,侧扫雷达推算的流量满足推流定线要求;水位在2.93~10.79 m,流速在0.33~1.19 m/s 时侧扫雷达在线流量监测系统可在梧州水文站河段应用。
5 结论及建议
通过分析侧扫雷达表面流速的准确性、断面平均流速与侧扫雷达表面流速率定分析来研究侧扫雷达在线流量监测系统在西江黄金水道梧州水文站河段的适用性。主要结论及建议如下:
(1)中水时梧州水文站侧扫雷达表层流速与走航式ADCP 表面流速在中泓位置横向分布基本一致,侧扫雷达表面流速数据准确性较高。
(2)根据已收集的水位 2.93~10.79 m、流速0.33~1.19 m/s 比测资料分析,二元线性和神经网络流速关系模型适线检验、符号检验和偏离数值检验均合格,系统误差<1%,随机不确定度<12%,侧扫雷达流量测验精度符合规范要求;基于二元线性模型和神经网络模型推算出的侧扫雷达流量是合理的,推算的日流量、特征流量与整编值基本一致,且满足推流定线要求,侧扫雷达在线流量监测系统可在西江黄金水道梧州水文站河段应用,在超出模型应用范围时,需要补充比测资料并重新分析。
(3)存在问题:①梧州站所在河段为西江黄金水道,经过测流断面的船只众多,船只停泊在测流断面附近和船只往来对侧扫雷达测速单元数据的置信度有明显影响,甚至有时候会出现置信度大于0.8 的单元覆盖水面宽少于实际水面宽一半的情况;②因为水位下降等原因,雷达发射到接收的时间变长,12~13 min 方可完成一次测验,每10 min 采集一次数据,会出现某些时段缺数据或者邻近几条数据一样的情况,如9月4日15:40有数据,15:50没有数据,16:00才有数据。
(4)建议动态智能调整数据采集间隔,如果一次测验没有完成可等待完成后再采集数据,避免出现数据缺漏或者邻近几条数据一样的情况。
(5)今后将在梧州水文站进一步收集不同水位级,特别是高水位级的测点,继续研究侧扫雷达在线流量监测系统在高水位级的适用性。
猜你喜欢
交通企业管理(2022年5期)2022-09-02
西江月(2021年3期)2021-12-21
黑龙江水利科技(2020年8期)2021-01-21
航空动力(2020年6期)2021-01-05
中华建设(2020年5期)2020-07-24
黑龙江水利科技(2020年2期)2020-05-07
科技创新与应用(2019年34期)2019-12-20
水电与新能源(2019年5期)2019-05-30
山东工业技术(2018年23期)2018-12-27
西江月(2018年5期)2018-06-08
