2019国外航天活动大盘点
2020-03-09 03:23:24杨宇光
太空探索 2020年1期
文/ 杨宇光

同2018年一样,2019年是全球航天活动相对比较平静的一年,虽然发射次数并不少,但大多是集中在近地轨道和地球同步轨道的商业航天或民用航天活动,只有印度和以色列向月球发射了着陆器,但均以失败告终。全年除了已经在轨的深空探测器开展各种变轨和空间探测活动外,没有新的深空探测器发射。
国际空间站任务 持续推进
在载人航天领域,国际空间站依然是整个人类唯一持续有人驻留的前哨基地。这个重量超过400吨的庞然大物,始终保持3~6名航天员在轨值守,并持续开展各方面的科学研究。2019年,分别由俄罗斯的进步MS-11、MS-12、MS-13,日本的HTV-8、美国的天鹅座NG-11、NG-12等为国际空间站提供补给,载人版龙飞船首次无人测试飞行也为国际空间站运送了部分物资。俄罗斯的“联盟号”依然是唯一能够为国际空间站提供乘组天地往返运输服务的飞船。联盟MS-12、MS-13和MS-15分别将第59~61批乘组送往国际空间站。而联盟MS-15号是俄罗斯最后一次使用联盟FG运载火箭发射联盟号载人飞船,今后的发射都将更换为联盟2.1a运载火箭。为确保可靠,俄罗斯还专门进行了联盟MS-14号无人发射测试,预计2020年4月第一次进行有人发射。
自2011年美国阿特兰蒂斯号航天飞机执行最后一次任务以来,美国已经连续8年丧失乘组天地往返运输能力,而只能依靠俄罗斯的联盟号实现乘组天地往返。美国目前开发的三型载人飞船—— 猎户座、载人龙飞船和星际线飞船都迟迟无法投入使用,导致美国宇航局不得不继续高价购买俄罗斯联盟号的座位,在经费难以维持的情况下,美国甚至考虑减少驻站航天员的数量来节约经费。
2019年美国宇航局的一项重要举措是将国际空间站向商业公司开放,可以预见这座以科学实验为主的大型空间站将会出现更多的商业活动,包括太空旅游等。这也是美国宇航局为了节约资金,以便将重点目标转移到月球门户等项目的重要举措。而商业公司的加入也为国际空间站的持续运行提供了新的希望,在各参与国宇航局同意将国际空间站运营到2024年的基础上,后续有望使国际空间站一直运行到2030年甚至更久。
继2018年国际空间站发生漏气事故,最后发现联盟号飞船的轨道舱被人为钻了小孔之后,2019年在国际空间站又发生一起惊人的事件——第58/59批乘组成员,美国航天员安妮·麦克莱恩在驻站期间利用国际空间站能够接入互联网的通信链路,采用黑客手段进入已经与其分开的前同性恋伴侣、美国前空军情报官员萨默尔·沃登的银行账户,并挪动了资金。安妮·麦克莱恩在返回地球后进行的调查中辩称自己是在打理两人离婚前的共同财产。这被认为有可能是人类历史上第一起太空犯罪案件,因为从来没有先例,这一事件引起了国际空间领域,特别是国际空间法学界的热议。但在另一方面,这一事件也说明了人类的载人航天活动趋于成熟—— 驻扎在国际空间站的航天员可以像在日常生活中一样访问互联网,管理银行账号或进行网上交易。而这一过程中,跟踪和数据中继卫星起到了不可替代的作用。

▲ 安妮·麦克莱恩在执行第58次空间站飞行任务时使用电脑与地面联络
此外,2019年国际空间站的亮点活动还包括人类首次完全由女航天员进行的多人太空行走,阿联酋首位航天员,以及对国际空间站最大的科学仪器—— 曾经有中国参与的阿尔法磁谱仪的维修等。其中全女性太空行走本来计划在3月进行,但因为两位女航天员缺少合适尺寸的舱外航天服而导致计划推迟。在美国宇航局看来,这次太空行走具有极为重大的意义,表明女性在载人航天活动中扮演了越来越重要的角色。
2019年3月2日,载人版龙飞船从佛罗里达州的肯尼迪航天中心39A发射台升空,大约一天后与国际空间站对接,于2019年3月8日返回地球并成功在大西洋溅落。这次无人飞行测试本身堪称完美。该飞船具备承载7名航天员往返国际空间站的能力。虽然本次飞行没有载人,但承载了穿着太空探索技术公司新研航天服的假人,对未来载人飞行的各个环节进行了充分的测试。由于载人版的龙飞船要求能够在空间站无人值守的情况下也能自动进行对接,而不是靠空间站内的航天员利用机械臂“抓捕”飞船并靠泊在空间站上,因此本次飞行还对龙飞船上的低冲击交会对接机构以及对接过程进行了测试。虽然空间站在正常情况下一直保持有人值守,但若在紧急状态下出现发射乘组全部撤离的情况,这样的设计就能够为后续乘组再次进入空间站或实施营救任务奠定基础。

▲ 载人型龙飞船返回舱漂浮于海面
太空探索技术公司的目标是使这款载人飞船具备可重复使用的能力。它原来的设计相当激进,准备采用发动机在地面反推着陆而不是依靠降落伞着陆(虽然仍具有降落伞作为备份手段),这样做的好处是最后着陆用的发动机和发射过程中紧急逃逸系统可以统一考虑设计,节约资源。太空探索技术公司也充分考虑了冗余备份措施,8台超级天龙座发动机在飞船侧面安装,每两台发动机形成相互备份关系。这些发动机是利用3D打印技术制造的,具有非常优异的性能。但美国宇航局为了安全考虑还是让太空探索技术公司改回了传统的伞降方式。太空探索技术公司也在2019年进行了降落伞系统的多次测试,可以在4个主伞没有全部都打开的情况下仍然确保安全溅落。
在2019年4月8日对已经经历过一次飞行任务的载人版测试飞船进行地面测试的过程中,由于超级天龙座发动机的故障,导致整个飞船被炸毁,虽然没有人员伤亡,但现场极其惨烈。在这次地面试验过程中,用于姿态控制,且推力较小的天龙座发动机的测试是正常的,爆炸发生在之后对超级天龙座发动机的测试。根据试验数据分析,导致故障的原因是飞船推进系统使用的四氧化二氮氧化剂泄漏到了为储箱提供增压的氦气管路中,这是在试验前的准备工作中发生的,进而在点火时导致了整个飞船的爆炸。在2019年11月13日进行的试验中,成功复现了当时的故障,太空探索技术公司对超级天龙座发动机进行了改进,更换了导致4月爆炸事故的阀门,并增加措施在飞船溅落前将发动机喷管重新封住,以避免溅落后海水倒灌的影响。2019年11月,太空探索技术公司成功完成了改进后的整个推进系统全过程地面静态测试。预计用于该项测试的飞船也将用于发射中止逃逸测试,为2020年计划进行的载人飞行测试奠定基础。此外,波音公司的星际线飞船已于12月20日首飞,但由于飞船内部时钟出现故障,没有达到预定轨道,无法与国际空间站对接。
太空探索技术公司 引领航天基础创新
虽然2019年度太空探索技术公司在载人龙飞船的测试中遇到挫折,但该公司作为航天领域创新技术的引领者,在其它方面的航天活动开展得如火如荼。
太空探索技术公司为未来载人登陆火星任务研发的重型运载工具——“星舰”进行了若干次原理性测试。与以往猎鹰火箭的设计不同,该运载器采用两级完全可重复使用设计,低地球轨道运载能力在150吨以上。为了平衡成本、性能和可重复使用所必须的再入过程放热难题,“星舰”没有采用运载火箭传统使用的铝合金,也没有采用在猎鹰火箭上大量使用的铝锂合金,而是采用了不锈钢!并且完全放弃了之前采用复合材料的方案。“星舰”的设计本身要面对巨大的技术挑战,其在再入过程中对姿态控制的要求和对地面垂直着陆的要求在设计上存在冲突,并且发射过程中也缺乏紧急逃逸的手段。虽然太空探索技术公司对该火箭的可靠性信心十足,但可以预见将来要获得美国联邦航空管理局的载人发射许可并非易事。
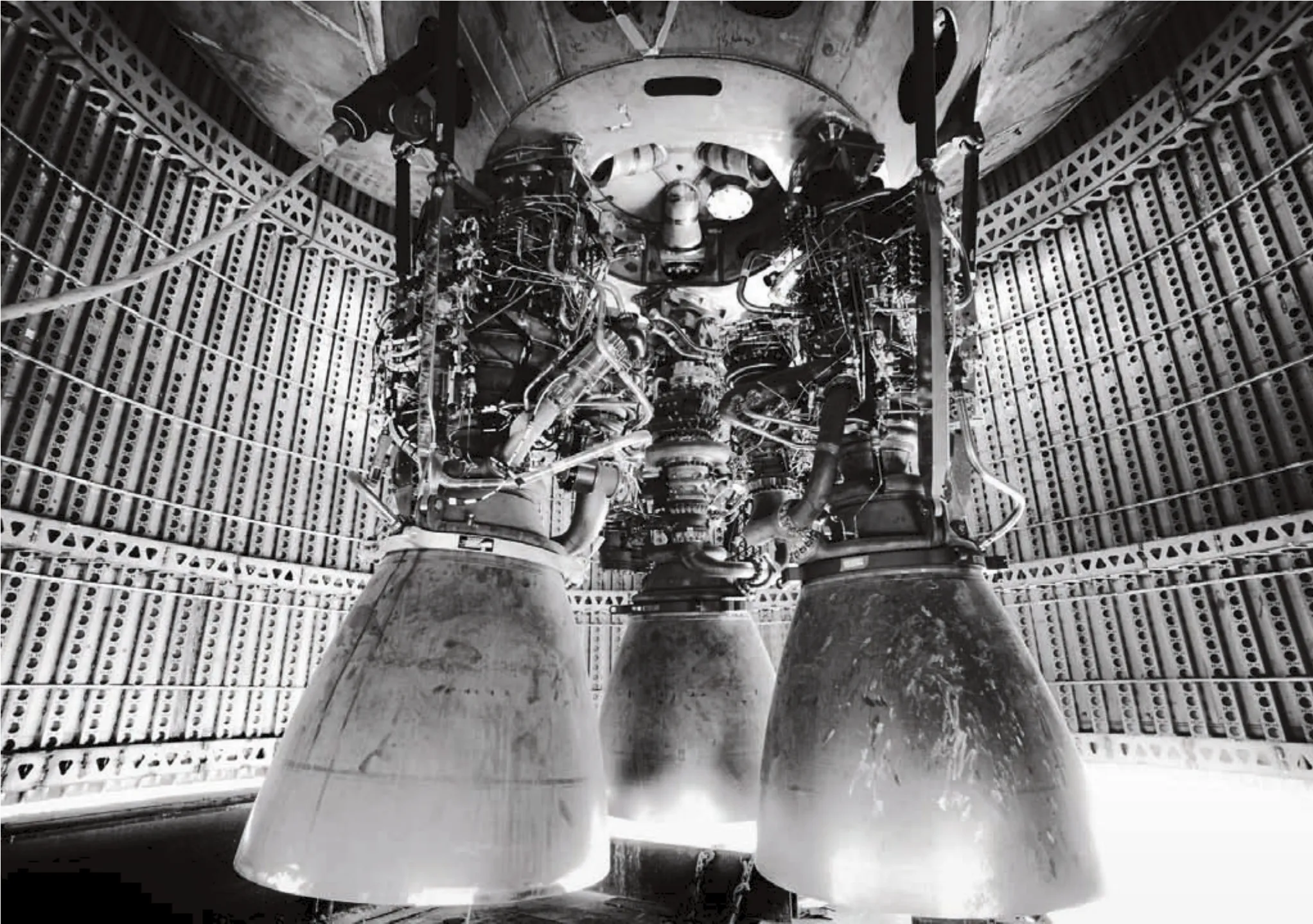
▲ “星舰”MK1的三台猛禽发动机
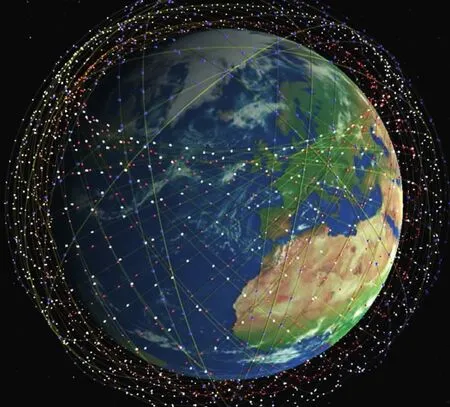
▲ 太空探索技术公司准备把 1.2 万颗 Ku、Ka 和 V 波段卫星部署到不同高度的多个轨道
“星舰”的第一级,也就是大猎鹰火箭和第二级均采用以液氧/甲烷为推进剂的猛禽发动机。采用这样的组合也是考虑到目前的液氧/煤油发动机在燃烧后有可能产生碳烧结并堵塞发动机管路,不利于可重复使用。因此目前世界上有多家公司开发大推力液氧/甲烷发动机。太空探索技术公司对“星舰”的第二级进行耐压测试的过程中发生故障,储箱的顶盖被炸飞,但太空探索技术公司认为这不是大问题,并将在新的测试阶段进行更全面的试验。实际上,由于研发重型运载火箭固有的难度,可以预见“星舰”的第一级研制将遇到更大的困难。由于猛禽发动机的推力对于重型运载火箭来说仍然偏小,“星舰”的第一级将采用24到37台猛禽发动机。同重型猎鹰火箭不同,它将面临更加严重的动力学耦合问题,是否能够解决仍然是未知数,再加上火箭高达9米的直径,研制过程本身就具有极大难度。美国宇航局局长也对太空探索技术公司专注于该型火箭的开发,而对美国宇航局更为着急的载人版龙飞船的研发一拖再拖提出了批评。太空探索技术公司不可能在其计划的2020年年底前将“星舰”发射入轨,具体拖延到什么时候还要看地面测试过程中是否会出现更多的故障。
2019年太空探索技术公司的猎鹰9号火箭一直保持不错的飞行记录。4月11日和6月25日,目前人类运载能力最强的现役运载火箭猎鹰重型实施了两次商业发射,表明太空探索技术公司已经基本解决了多达27台梅林发动机并联带来的复杂问题。但由于猎鹰重型火箭起飞时是由3个相同的“猎鹰9号”一级提供动力,也即27台发动机被分成了3组,因此在动力学耦合方面比未来的大猎鹰火箭要简单得多,在猎鹰重型火箭上积累的经验是否适用于后续的大猎鹰火箭还很难说。
在2018年发射试验卫星的基础上,太空探索技术公司利用“猎鹰9号”分两次将120颗星链卫星送入轨道,这两次发射有诸多亮点。
该公司首次实现猎鹰9号火箭一级的第4次复用,同时还使用了之前发射回收的整流罩,在通过多次重复使用降低成本的技术途径上又迈进了一步。比较有特色的是星链卫星的设计与发射方式。该卫星在节约成本上可以说和猎鹰火箭一样做足了功夫。包括使用氪气而不是昂贵的氙气作为电推进系统的推进剂,尽管这样做会在性能上有一定损失,但换来的是整体成本的大幅度降低。而星链卫星的发射也体现了很大的创新点—— 其核心是将卫星的主结构与发射多颗卫星的适配器一体化设计,也即卫星本身的结构就具备多星适配器的功能,这样的设计使得星链卫星在利用猎鹰9号火箭发射时,可以充分利用整流罩内的空间,并且最大限度地利用运载能力。当然,这也给入轨后卫星的释放带来了一定难度。太空探索技术公司是通过末级火箭的自旋将卫星逐个分离。
虽然太空探索技术公司实施星链卫星发射有诸多技术创新和亮点,但也引起了巨大的争议。现在很少有人再质疑太空探索技术公司能否将数万颗低轨通信卫星发射入轨,而是聚焦在这些卫星入轨后带来的频率和轨位资源紧张问题。如此庞大数量的卫星必然导致空间碰撞的风险增加,欧空局希望与太空探索技术公司协调可能出现的碰撞事件,太空探索技术公司极不配合,最后欧空局被迫让自己的卫星主动变轨规避。除了占用资源和产生空间碎片的风险,数量庞大的卫星还会给天文观测带来严重的干扰,一旦真的在近地轨道部署数万颗卫星,很多天文观测活动将无法进行。虽然人类今后会有更多的空间望远镜,但地面的天文观测依然是无法替代的。如何解决这一矛盾,目前也看不到太好的方案。
重返月球和月球探测活动 如火如荼
2019年是阿波罗登月50周年,美国举行了多场隆重的纪念活动。也就在这段时间,美国公布了2024年重返月球的计划,该计划以阿波罗的双胞胎姐妹阿尔忒弥斯命名,如果该计划进展顺利,将实现女性航天员第一次踏足月球的壮举,而且是实现人类第一次在月球南极区域着陆。美国目前正在研发的猎户座飞船和SLS重型运载火箭已经为该计划奠定了比较好的基础,但这两个项目均拖期严重。2019年7月2日,猎户座飞船采用“和平卫士”MX洲际弹道导弹第一级固体发动机改进研制的助推器完成了飞行过程中的逃逸系统测试,比较可惜的是由于经费和进度紧张,本次飞行试验只测试了逃逸系统本身,而没有在逃逸系统完成工作后测试降落伞系统是否能正常工作,确保乘组安全溅落。本年度还进行了猎户座飞船指令舱与欧洲研制的服务舱的对接测试。
与猎户座飞船相比较,SLS重型运载火箭的拖延更为严重,该型运载火箭继承了大量航天飞机的技术,其芯级火箭直接采用了航天飞机使用的主发动机,只不过从3台增加到4台。美国目前已决定今后几年的阿尔忒弥斯任务均采用该火箭发射,而其它商业公司只负责将货物和补给运送到环月轨道或月球表面。
要实现在2024年重返月球,比较紧迫的是登月舱的方案。在2019年正式公布重返月球计划后,美国各大公司均提出了自己的登月舱方案,美国宇航局目前还没有确定最终选择。不过,由蓝色起源、洛克希德·马丁、诺斯罗普格鲁门和Draper实验室等几家公司强强联合提出的方案,目前看来中标的希望最大。其中蓝色起源公司将作为主承包商负责登月舱的下降级研发,洛·马公司负责登月舱上升级的研发,诺斯罗普格鲁门公司将基于其天鹅座飞船的技术研发将登月舱从月球门户转移到低月球轨道的转移级。整个登月舱将由蓝色起源公司新研制的可重复使用新格伦火箭发射。
然而,美国宇航局所制定的阿尔忒弥斯计划的核心是月球门户轨道站。这是一个小型的载人空间站,将由美国、欧空局、日本、加拿大、俄罗斯等国联合研制。它的推进模块采用了已经被取消的“小行星重定向计划”研制的50千瓦级大功率太阳能电池阵和高功率电推进发动机。美国宇航局长称该空间站将实现未来登月任务的低成本和高安全性,同时为未来的载人火星任务积攒经验。然而该计划一直受到航天领域技术专家的质疑。美国首次登月航天员奥尔德林也表示月球门户轨道站对于2024年实现返回月球没有用处。
除了美国的重返月球计划外,俄罗斯也公布了其载人登月计划,但在具体实现上并没有看到实质性已落实的步骤,缺乏资金是最重要的困难。而2019年月球探测的亮点是以色列和印度进行的月面软着陆尝试。
以色列私人公司研制的“创世纪号”由以色列非营利机构SpaceIL发起,以色列航空航天工业公司建造,该着陆器发射质量585 千克,于2019年2月22日由猎鹰9号Block 5火箭发射,于2019年4月11日尝试在月球表面的澄海软着陆时坠毁。测控数据表明,探测器软着陆接近最后阶段时,发动机在离月球表面约10公里处停止工作,最后探测器以超过130米/秒的速度撞击月面坠毁。虽然遭遇失败,但该探测器实现了以色列首次进入环月轨道,为以色列今后类似的尝试积累了经验。
印度的“月船2号”是印度空间研究组织ISRO在“月船1号”基础上研制的第二个月球探测器。该探测器总重3.85吨,由轨道器、着陆器和巡视器3部分组成。其中着陆器重量为1.471吨,携带有27千克重的微型巡视车。由于探测器过重,印度目前能力最强的GSLV运载火箭也不能将其直接送到奔月轨道,而是将它送至大椭圆轨道后,轨道器依靠自身的发动机不断抬升远地点,最终进入奔月轨道。该探测器于2019年7月22日发射,8月22日进入环月轨道。该探测器的着陆点位于南纬70度,若着陆成功将是人类最靠近月球南极点的探测器。但可惜的是在9月7日尝试进行软着陆时,探测器在距离月面2.1公里处与地面失联。后续与探测器重新建立联系的尝试均告失败。

▲ “月船2号”在月球上空飞行
以色列和印度的月球软着陆尝试失败,再次证明了月球软着陆技术的复杂性和难度。虽然月球的质量仅为地球的1/80,但从整个太阳系来看,仍然属于大质量天体。环绕月球运行的人造卫星的速度超过1600米/秒,要想实现软着陆,必须将这个速度降为0,同时将高度也降为0。要想节约推进剂,这个过程必须在很短的时间内完成,因此从环绕月球的轨道出发,到完成整个软着陆过程,探测器的速度改变能力要超过2000米/秒,也因此在月球着陆的探测器有超过一半的重量都给了推进剂。更为重要的是,在月球软着陆过程不同阶段对于探测器推进系统的加速能力要求也不一样。如果探测器保持相同的推力,随着推进剂的消耗,其加速度会越来越大,远远超出最后阶段减速过程的要求,因此,大多数在月面实施软着陆的飞行器都选择了能够大范围调节其推力的发动机,这本身在工程上就是很大的挑战。而印度采用多发动机并联的方式解决该问题,又带来了发动机开关控制复杂等新问题和风险。
由于月球表面环境的复杂性,表面地形崎岖不平,任何探测器都不可能在坡度很大的地方安全软着陆,而且月球表面遍布陨石坑和各种大尺寸的岩石,再加上目前人类对月球表面环境勘察能力有限,还不能给出月面所有区域超高分辨率的图像,因此,在降落前增加一个悬停阶段有利于规避表面的不利地形,确保实现安全着陆,而悬停阶段对于着陆区域表面的探测和状态确认本身就很难。
另外,由于地球到月球的距离达38万公里,以光速进行的测控通信过程的时间延迟就超过1秒,而着陆过程又是在极短的时间内完成的,这就决定了着陆过程只能靠探测器自主完成,而不是在地面控制中心的操纵下完成。因此,探测器着陆过程对制导控制系统的性能与可靠性都提出了严格的要求。一般来说对于测量探测器本身位置、速度、姿态,以及到月面距离的传感器都采用多种不同手段相互备份,以确保整个过程的高可靠。
对于从绕月轨道下降实施软着陆这样的关键过程,设计师都希望能够监视整个过程的进行,但由于地月距离非常遥远,探测器要消耗很大的能量才能将信息传输到地面站,为了节约能源,一般都采用窄波束的遥测发射天线,以便集中能量向地球发射信息,但这样也提出了天线对准精度的要求,一旦天线的伺服机构或探测器的姿态出现偏差,就有可能导致传输信息的波束不能对准地面站而导致失联。
深空探测任务 有序进行
在深空探测领域,虽然2019年没有新的探测器发射,但已经在轨的几个深空探测器都取得了不俗的成绩。洞察号火星探测器在2018年实现软着陆后,和好奇号火星车等继续在火星表面坚守,为科学家提供更多的数据。朱诺号探测器在环绕木星运行的过程中也已经完成了多个圈次的考察,每次在运行到近木点时都要经受木星强大而危险的磁场和辐射的考验。帕克号探测器2019年两次通过近日点,并在飞掠金星的过程借力加速,最终将实现“触摸太阳”的壮举。
“新视野号”在造访冥王星之后,在2019年1月飞越其在遥远的柯伊伯带的第二个目标(486958)2014 MU69,该小行星于2014年由哈勃空间望远镜发现,“新视野号”传回的图像表明这颗小行星是由一大一小两个物体连接而成,直径在30到45公里之间,其最初的中文译名为“天涯海角”。“新视野号”完成探测后,美国宇航局宣布将其正式命名为Arrokoth,在美洲原住民部落波瓦坦语中这个名字有“天空”的意思。
在2018年穿过日球层边缘,到达星际空间的旅行者2号探测器,回传了丰富的探测数据,任务团队在2019年公布了这些研究成果,为人类了解太阳系外围区域的空间环境提供了更多的参考。除了已经能源耗尽的“先驱者10号”“先驱者11号”之外,可以预见“旅行者1号”“旅行者2号”和“新视野号”在飞离太阳系的过程中将继续为人类了解柯伊伯带附近的星际空间努力工作。
2019年深空探测领域最令人瞩目的事件是日本隼鸟2号探测器对龙宫小行星进行的探测和采样工作。“隼鸟2号”由日本NEC公司研制,设计是在“隼鸟1号”的基础上通过改进完成。探测器重达609千克,其干重约为409千克,它配备了4台离子电推进发动机,其中3台为主份,另外一台为备份。三台同时工作时推力达到28毫牛,发动机的比冲高达3000秒。离子电推进系统的干重约66千克,携带了66千克的氙气,虽然推进剂加注量不多,但因为采用了先进的电推进系统,可以为飞行器提供2000米/秒的速度增量。整个飞行器的本体尺寸为1米×1.6米×1.25米,太阳能帆板尺寸达到6米×4.23米,当“隼鸟2号”与太阳距离1个天文单位时,可以提供2.6千瓦的电力输出,即使达到距离太阳最远处(约1.4个天文单位),其供电能力依然在1.4千瓦以上。飞行器携带的锂离子蓄电池容量达到13.2安时。
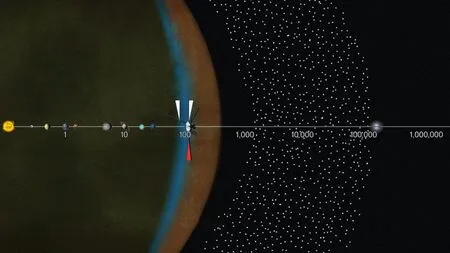
▲ 旅行者 2 号飞行征途示意图
“隼鸟2号”在进入环绕龙宫小行星的轨道后,初始阶段保持在与龙宫表面距离20公里的高度,对其表面进行勘察和测绘。2018年6月16日,“隼鸟2号”开始降低轨道。2018年9月21日,“隼鸟2号”在55米高度弹射了巡视器1A和巡视器1B到龙宫表面。这两个巡视器工作正常,并发回了探测数据。此后,“隼鸟2号”在2018年10月3日释放了由德国宇航中心研制的MASCOT子探测器,它在龙宫表面按计划运行了16小时。
最初,日本宇宙开发署计划让“隼鸟2号”进行3次采样。“隼鸟2号”原计划在2018年10月进行首次样本收集,但由于巡视器发回的数据表明龙宫的表面地形过于复杂,且原计划的采样点有大小石块,却没有可采的土壤,因此,采样操作被推迟到2019年进行,并由此增加了很多操作。2019年2月21日“隼鸟2号”完成了第一次采样,7月11日完成了第二次采样。
在完成科学探测活动后,“隼鸟2号”使用其离子电推进发动机变轨,开始返回地球。探测器于2019年11月13日正式离开龙宫小行星。当“隼鸟2号”在2020年年底飞经地球时,它将以每3秒1转的速度使返回舱起旋以保持再入过程中姿态稳定。返回舱将以12公里/秒的速度进入大气层,并在距离地面10公里高度展开可反射雷达波的降落伞,抛掉防热罩,并发射位置信标信号。返回舱计划在澳大利亚的乌美拉靶场着陆,“隼鸟2号”总飞行距离将为52.4亿公里。

▲ 龙宫小行星外观
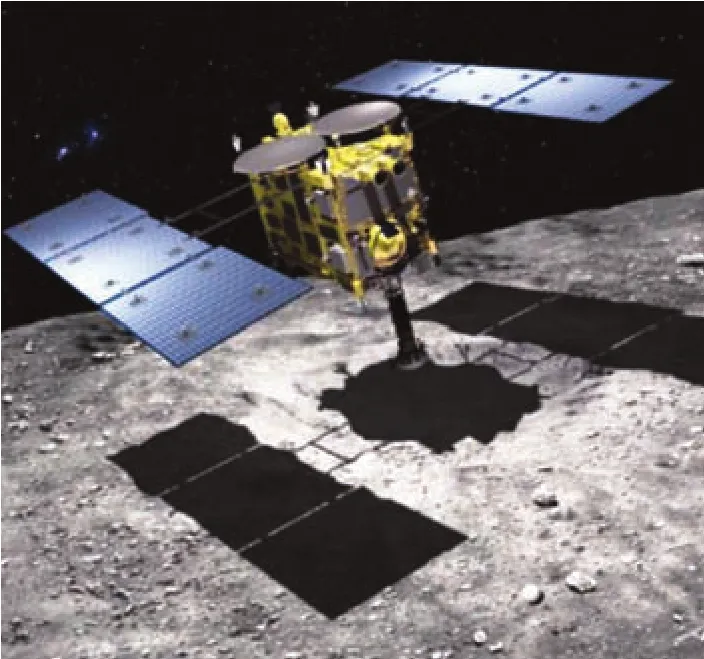
▲ “隼鸟2号”的外形
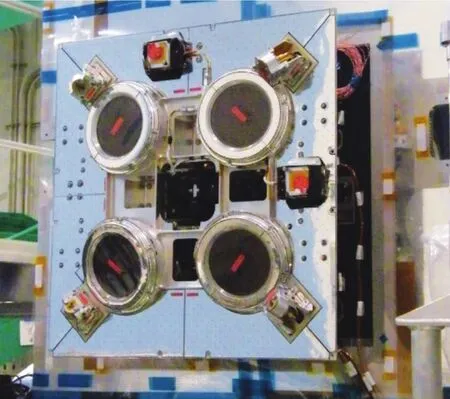
▲ “隼鸟2号”的离子发动机
截至目前为止,“隼鸟2号”已经在太空飞行5年,而整个任务周期长达6年。预计完成采样返回任务后,“隼鸟2号”还将剩余30千克氙气用于推进,可拓展探测其它天体。目前一个可选的目标是在2023年6月27日对2001 WR1小行星进行飞掠探测。
除了上面提到的2019年国外航天领域的重大事件,欧洲伽利略卫星导航系统的故障也引起了人们的广泛关注。由于是整个系统出了问题,不可能是某颗或某几颗卫星出现的问题,最后定位是地面站故障导致。目前伽利略系统还未建设完成,这一故障必将对今后该系统的应用和推广产生不利的影响。
猜你喜欢
军事文摘(2024年6期)2024-02-29 10:00:22
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:34
军事文摘(2022年18期)2022-10-14 01:34:16
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年5期)2016-07-12 15:17:57
太空探索(2016年9期)2016-07-12 10:00:02
太空探索(2016年2期)2016-07-12 09:57:25
太空探索(2016年2期)2016-07-12 09:57:24
太空探索(2016年6期)2016-07-10 12:09:06